
Recebo muito essa pergunta de integradores que estão especificando projetos de segurança de perímetro. A resposta importa porque afeta diretamente sua taxa de falsos alarmes5 e a confiança do seu cliente.
Nosso sistema não depende de um único modelo. Ele usa uma abordagem de fusão de múltiplos recursos que combina detecção de corpo inteiro8 para aquisição de alvos de longo alcance, um modelo de cabeça e ombros para filtragem de falsos alarmes de curto alcance e Re-ID para rastreamento contínuo em oclusões. Cada camada lida com um trabalho diferente.
 detecção humana PTZ câmera algoritmo de IA
detecção humana PTZ câmera algoritmo de IA
Abaixo, detalho como cada camada de detecção funciona em implementações reais, quando cada modelo tem prioridade e como você pode ajustar o algoritmo para o seu site de projeto específico. Deixe-me guiá-lo pelos detalhes.
Índice
A Câmera Consegue Identificar com Precisão uma Pessoa Sentada ou Rastejando no Chão?
Esta é uma preocupação real. Em canteiros de obras e fazendas, as pessoas nem sempre ficam em pé. Se sua câmera procurar apenas por uma forma humana em pé, ela perderá eventos críticos.
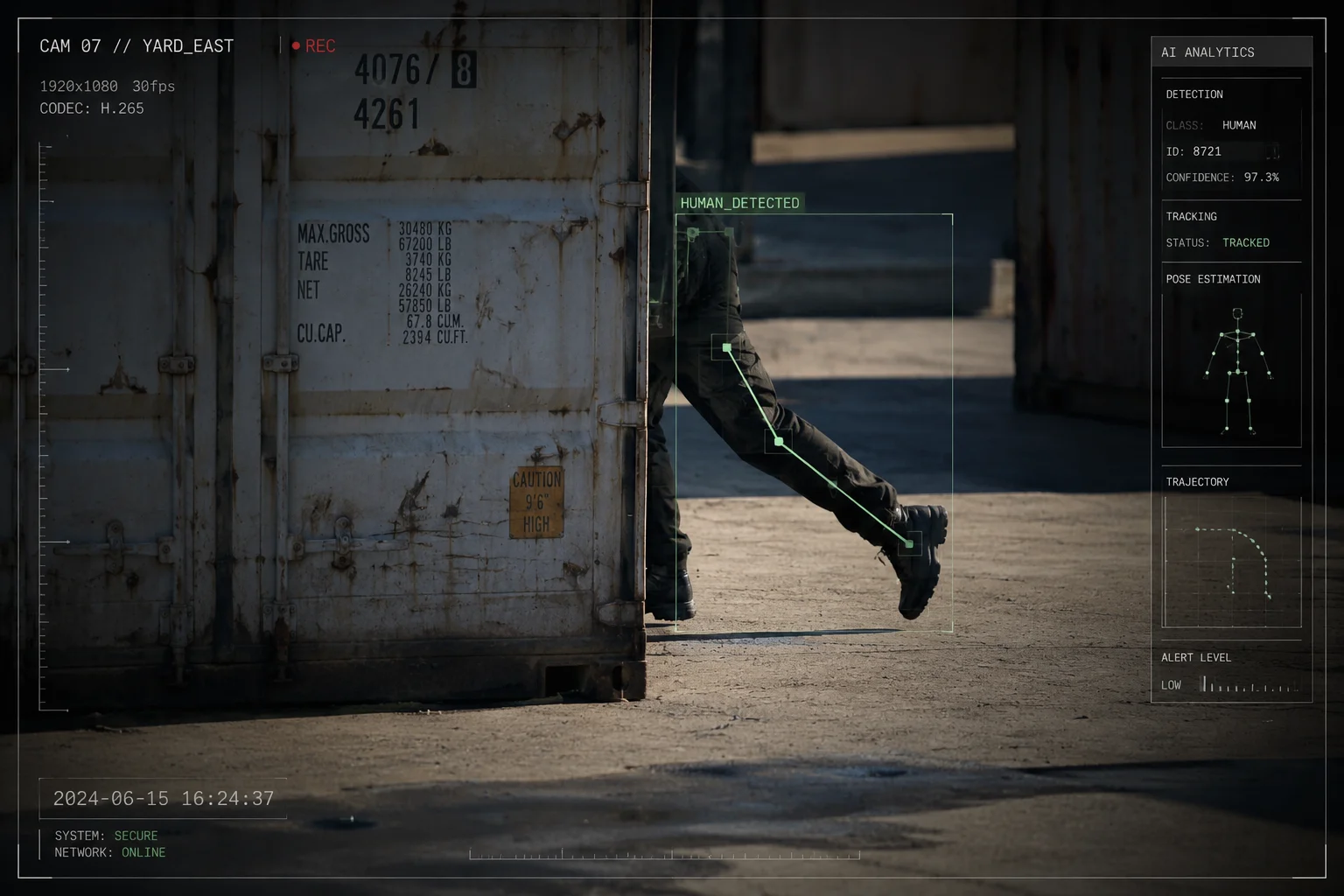
Sim, a câmera pode detectar uma pessoa sentada ou rastejando. O modelo de detecção de corpo inteiro usa uma CNN treinada em milhares de posturas não padronizadas. Ele reconhece proporções geométricas humanas e relações entre membros, não apenas uma silhueta ereta. Quando a postura é ambígua, o modelo de cabeça e ombros entra em ação como uma verificação secundária.
 detecção de pessoa sentada rastejando PTZ câmera
detecção de pessoa sentada rastejando PTZ câmera
Como a Detecção de Corpo Inteiro Lida com Posturas Não Padronizadas
O modelo de corpo inteiro não procura por um único modelo de “pessoa em pé”. Ele analisa proporções corporais, ângulos dos membros e padrões de movimento. Uma pessoa rastejando ainda tem uma relação cabeça-tronco, comprimento dos braços e comprimento das pernas que correspondem à geometria humana. A CNN foi treinada em conjuntos de dados que incluem posturas sentadas, agachadas, curvadas e rastejando.
Pela minha experiência trabalhando com integradores de segurança agrícola, o cenário de rastejamento surge mais do que você imagina. Invasores muitas vezes tentam ficar baixos perto de cercas. Nosso algoritmo lida com isso porque extrai pontos-chave do esqueleto mesmo quando o corpo está horizontal. O sistema mapeia as posições das articulações e verifica se a estrutura geral corresponde a um esqueleto humano.
O Papel da Análise de Movimento
A detecção de postura estática sozinha não é suficiente. O sistema também analisa padrões de movimento. Uma pessoa engatinhando se move de forma diferente de um cachorro ou de um tufo de grama rolando. O algoritmo observa:
- Velocidade do movimento em relação ao tamanho do objeto
- Padrões de articulação dos membros (braços e pernas se movendo em ciclos alternados)
- Mudanças de direção que indicam navegação intencional
Quando a Detecção se Torna Difícil?
Existem casos extremos. Se uma pessoa estiver enrolada em uma bola apertada e completamente imóvel, o sistema pode levar mais tempo para classificar o alvo. Nessas situações, a lógica de rastreamento automático da câmera manterá a posição PTZ e aguardará o movimento antes de confirmar o alerta. Isso evita falsos negativos sem sobrecarregar a conexão 4G com alarmes incertos.
Desempenho da Detecção de Postura por Distância
| Postura | Faixa de Detecção Confiável | Requisito Mínimo de Pixels | Nível de Confiança |
|---|---|---|---|
| Em pé/Andando | 20m – 100m | 32×64 pixels | Alta |
| Sentado/Ajoelhado | 10m – 60m | 48×48 pixels | Alta |
| Engatinhando/Deitado | 5m – 40m | 64×32 pixels | Médio-Alto |
| Enrolado/Estacionário | 3m – 20m | 48×48 pixels | Médio |
O principal ponto aqui é que posturas não padronizadas precisam de mais pixels no quadro. É por isso que o zoom óptico de 40X7 é importante. O sistema detecta um alvo potencial em grande angular e, em seguida, amplia para obter densidade de pixels suficiente para a classificação da postura.
Como o Re-ID de Pedestres Melhora a Consistência do Rastreamento Quando a Pessoa Muda de Direção?
Rastrear uma pessoa que anda em linha reta é fácil. O verdadeiro desafio é quando ela se vira, se esconde atrás de um poste ou troca de roupa tirando uma jaqueta. O rastreamento de movimento padrão perde o alvo nesses momentos.
O Re-ID resolve isso extraindo um vetor de características da aparência do alvo — cor da roupa, forma do corpo, acessórios e marcha. Quando a pessoa reaparece após uma oclusão ou mudança de direção, o sistema compara a nova detecção com os vetores de características armazenados. Se a pontuação de correspondência estiver acima do limite, o rastreamento é retomado instantaneamente sem disparar um novo alerta.
![]() rastreamento Re-ID de pedestre oclusão de câmera PTZ
rastreamento Re-ID de pedestre oclusão de câmera PTZ
O Que Acontece Sem Re-ID
Sem Re-ID, um rastreador básico usa previsão de posição. Ele adivinha onde o alvo estará no próximo quadro com base na velocidade e direção. Quando a pessoa se vira 180 graus, a previsão falha. O sistema então vê um “novo” objeto se movendo na direção oposta. Isso causa dois problemas:
- A PTZ pode girar na direção errada, perdendo o alvo completamente.
- O sistema gera um segundo alerta para a mesma pessoa, desperdiçando largura de banda na sua conexão 4G.
Como Funciona a Extração de Vetor de Características
O chip de IA em nossa câmera executa uma rede de incorporação leve ao lado do modelo de detecção. Para cada alvo humano confirmado, ele gera um vetor de características de 128 ou 256 dimensões. Pense nisso como uma impressão digital numérica da aparência da pessoa.
Este vetor codifica:
- Blocos de cores dominantes (cor da camisa, cor da calça)
- Padrões de textura (listras, liso, colete refletivo)
- Proporções corporais (relação altura/largura, largura dos ombros)
- Objetos carregados (mochila, caixa de ferramentas)
O Processo de Correspondência
Quando o rastreamento é interrompido, o sistema armazena o último vetor de características conhecido. Pelos próximos 30 a 60 segundos (configurável), cada nova detecção humana no quadro é comparada com este vetor armazenado. A comparação usa similaridade de cosseno1. Se a pontuação exceder 0,75 (ajustável), o sistema vincula a nova detecção à trilha existente.
Limitações de Re-ID a serem observadas
Re-ID não é perfeito. Ele tem dificuldades quando:
- Várias pessoas usam uniformes idênticos (comum em canteiros de obras)
- A iluminação muda drasticamente entre a detecção e a redetecção
- A pessoa remove ou adiciona uma peça de roupa externa grande
Para cenários uniformes, recomendo ativar análise de marcha2 como um recurso suplementar. Mesmo quando dois trabalhadores usam o mesmo colete, seus padrões de caminhada são diferentes o suficiente para o sistema manter trilhas separadas.
Re-ID vs. Rastreamento de Movimento Simples
| Recurso | Rastreamento de Movimento Simples | Rastreamento Re-ID |
|---|---|---|
| Lida com mudança de direção | Não — perde o alvo | Sim — corresponde pela aparência |
| Lida com oclusão breve | Parcial — 1-2 segundos no máximo | Sim — até 60 segundos |
| Separação multi-alvo | Ruim — IDs frequentemente trocam | Forte — vetores únicos por pessoa |
| Custo de computação | Muito baixo | Moderado |
| Melhor caso de uso | Campo aberto, alvo único | Locais complexos, várias pessoas |
A IA Acionará um Alerta se Apenas as Pernas ou o Tronco de uma Pessoa Estiverem Visíveis no Quadro?
Isso acontece mais do que as pessoas esperam. Uma pessoa atrás de uma meia parede, uma cerca ou maquinário estacionado pode mostrar apenas partes parciais do corpo. Se o seu sistema precisar de um corpo inteiro para disparar, você tem um ponto cego.
Sim, o sistema acionará um alerta na visibilidade parcial do corpo. O modelo de cabeça e ombros foi projetado especificamente para cenários de apenas parte superior do corpo. Para casos de apenas parte inferior do corpo (pernas visíveis abaixo de uma barreira), o modelo de corpo inteiro usa detecção de pares de membros — reconhecendo duas pernas com padrões de marcha humana como evidência suficiente para classificar o alvo como humano.
 câmera de segurança com IA de detecção de corpo parcial
câmera de segurança com IA de detecção de corpo parcial
Como a Detecção Parcial Funciona na Prática
O pipeline de detecção executa vários classificadores em paralelo. Ele não espera por uma única “pessoa inteira” caixa delimitadora4. Em vez disso, ele procura por aglomerados de partes do corpo que estatisticamente pertencem a um humano.
Apenas Parte Superior do Corpo (Cabeça, Ombros, Tronco)
Este é o caso mais fácil. O modelo de cabeça e ombros foi construído exatamente para este cenário. A forma invertida de “U” da cabeça e ombros humanos é uma das formas mais distintas na natureza. Nenhum animal ou objeto comum a replica na mesma escala e proporção.
Quando apenas a parte superior do corpo está visível:
- O sistema executa primeiro o classificador de cabeça e ombros
- Se a confiança exceder 0,8, ele dispara imediatamente
- Em seguida, a PTZ tenta dar zoom ou girar para revelar mais do alvo para confirmação secundária
Apenas Parte Inferior do Corpo (Pernas, Pés)
Isto é mais difícil. Duas formas verticais movendo-se em padrões alternados poderiam ser pernas humanas, mas também poderiam ser postes de cerca de balançando ao vento. O sistema usa três verificações:
- Proporção de aspecto: Pernas humanas têm uma proporção específica de largura para altura que difere de postes ou estacas.
- Articulação: Pernas dobram no joelho. O sistema procura por mudanças angulares periódicas em um ponto médio.
- Frequência de marcha: Caminhar humano tem uma cadência de aproximadamente 1,5 a 2,5 passos por segundo. O sistema verifica se a frequência de movimento se enquadra nessa faixa.
Se todas as três verificações forem aprovadas, o sistema classifica o alvo como “humano provável” e dispara um alerta de baixa confiança. Em seguida, comanda a PTZ para se reposicionar para um melhor ângulo.
Apenas Tronco (Sem Cabeça, Sem Pernas)
Este é o cenário de detecção parcial mais desafiador. Um tronco sem cabeça ou membros pode ser uma pessoa atrás de um muro, ou pode ser um objeto em movimento como um carrinho. Neste caso, o sistema:
- Marca a detecção como “não confirmada”
- Mantém a PTZ no alvo por 3-5 segundos
- Espera que qualquer parte adicional do corpo se torne visível
- Se nenhuma evidência adicional aparecer, ele registra o evento, mas não envia um alerta 4G
Essa abordagem em camadas mantém o uso de dados celulares baixo, ao mesmo tempo em que captura ameaças potenciais.
Configurando a Sensibilidade para o Seu Local
Para locais com muitos cenários de visualização parcial (armazéns, pátios cercados), recomendo diminuir o limite mínimo de confiança de 0,8 para 0,65 e ativar o modo de detecção de “corpo parcial” no firmware. Isso aumenta a sensibilidade ao custo de um pouco mais de alertas para revisão. Para implantações em campo aberto onde corpos inteiros são quase sempre visíveis, mantenha o limite padrão para minimizar o ruído.
O Modelo de Cabeça e Ombros Reduz Falsos Alarmes Causados por Animais Grandes em Sítios Agrícolas?
Implantações em fazendas são o pior caso para alarmes falsos. Veados, coiotes, cães grandes e gado acionam a detecção básica de movimento. Se cada animal que cruza gerar uma notificação push 4G às 3 da manhã, seu cliente desativará o sistema em uma semana.
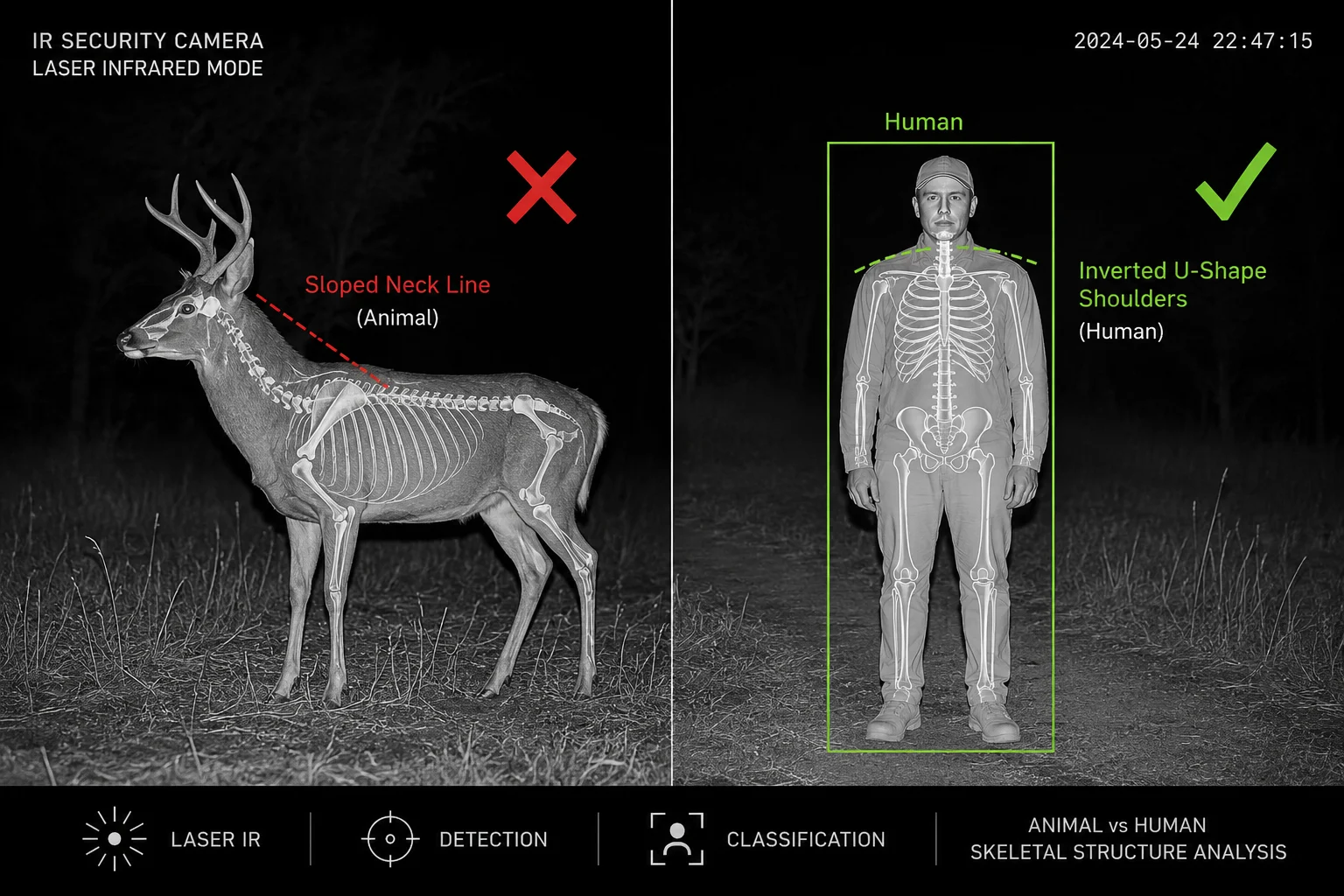
Sim, o modelo de cabeça e ombros reduz drasticamente os alarmes falsos causados por animais. A principal diferença é a geometria esquelética: humanos têm ombros horizontais perpendiculares a um pescoço vertical, formando uma forma de “U” invertido. Nenhum animal de quatro patas replica essa estrutura. Mesmo animais grandes como veados ou cavalos têm uma linha inclinada do pescoço para as costas que o modelo filtra explicitamente.
 câmera de segurança de fazenda alarme falso filtro de animais
câmera de segurança de fazenda alarme falso filtro de animais
Por que os animais enganam a detecção básica
A detecção básica de movimento e até mesmo alguns sistemas de “detecção humana” de baixo custo usam o tamanho simples da caixa delimitadora como filtro principal. Um cervo grande a 30 metros produz uma caixa delimitadora de tamanho semelhante a um humano a 50 metros. Sem análise de forma, o sistema não consegue distingui-los.
Algumas câmeras econômicas usam um detector de estágio único que apenas verifica “este objeto é grande o suficiente e está se movendo?”. Essa abordagem falha completamente em fazendas e locais rurais.
Como Nossa Abordagem Multicamadas Resolve Isso
O pipeline de detecção para o modo fazenda funciona assim:
- Gatilho de movimento: Algo se move no quadro. O sistema é ativado.
- Pré-filtro de corpo inteiro: A proporção do objeto e a velocidade de movimento são consistentes com um humano? Se sim, prossiga. Se o objeto se move sobre quatro patas ou tem um eixo corporal horizontal, ele é marcado como “animal” e suprimido.
- Confirmação de cabeça e ombros: A parte superior do objeto mostra o padrão invertido em “U”? Esta é a verificação decisiva.
- Validação de tamanho: O tamanho em pixels do objeto está dentro da faixa esperada para um humano naquela distância? (Usando a distância focal e o ângulo de inclinação conhecidos da câmera para estimativa de distância.)
Diferenças Estruturais entre Animais e Humanos
O modelo de cabeça e ombros explora diferenças anatômicas fundamentais:
- Humanos: Pescoço vertical, linha de ombros horizontal, cabeça centrada acima dos ombros
- Cervos/Cavalos: Pescoço estende-se para a frente em 45-60 graus, sem linha de ombros horizontal
- Cães/Coiotes: Cabeça está à frente do centro do corpo, largura dos ombros é estreita em relação ao comprimento do corpo
- Ursos (em pé): Mais próximo da forma humana, mas a proporção ombro-cabeça e a posição dos braços diferem significativamente
Redução de Falsos Alarmes no Mundo Real
Com base em dados de campo de instalações agrícolas no Texas e Alberta, a ativação do filtro de cabeça e ombro reduz os falsos alarmes acionados por animais em 85-95%. Os 5-15% restantes de falsos alarmes geralmente vêm de:
- Ursos em pé (raro, mas possível)
- Pássaros grandes pousando em postes de cerca perto (silhueta lembra brevemente uma cabeça)
- Espantalhos ou manequins (estes são detectados corretamente como “em forma humana” - o sistema não pode saber que não são reais)
Configuração Recomendada para Fazenda
| Configuração | Valor recomendado | Razão |
|---|---|---|
| Modo de detecção | Prioridade cabeça-ombro | Filtra quadrúpedes efetivamente |
| Tamanho mínimo de pixels | 40×40 | Ignora animais pequenos (coelhos, pássaros) |
| Sensibilidade de movimento | Médio | Reduz gatilhos de vento/vegetação |
| Cooldown de alerta | 30 segundos | Evita alertas repetidos do mesmo animal |
| Modo noturno | Laser IR + assistência térmica | Mantém a clareza da forma na escuridão |
Para projetos agrícolas, também sugiro definir o sinalizador de “supressão de animais” no firmware. Isso adiciona 200ms extras de tempo de processamento por detecção, mas reduz o volume de falsos alarmes em uma ordem de magnitude. Em uma conexão 4G, onde cada alerta consome largura de banda e bateria, essa troca vale a pena sempre.
Conclusão
Detecção humana em nosso Câmeras PTZ6 não é um único algoritmo — é um sistema em camadas. A detecção de corpo inteiro lida com longo alcance. A filtragem de cabeça e ombros elimina falsos alarmes. O Re-ID mantém o rastreamento através de oclusões. Juntos, eles oferecem desempenho confiável em projetos de segurança agrícola, de construção e de perímetro.
1. Definição e uso da similaridade de cosseno para comparar vetores de características em recuperação e correspondência. ︎↩︎ 2. Aprenda como os padrões de marcha são usados como biométricos para identificação humana. ︎↩︎ 3. Compreensão da proporção de aspecto no processamento de imagem para detecção e classificação de objetos. ︎↩︎ 4. Conceito de caixas delimitadoras usadas na detecção de objetos para localizar objetos dentro de uma imagem. ︎↩︎ 5. Definição geral de falsos alarmes e seu impacto na confiabilidade do sistema de segurança. ︎↩︎ 6. Introdução às câmeras pan-tilt-zoom e suas aplicações em vigilância. ︎↩︎ 7. Explicação do zoom óptico versus zoom digital em dispositivos de imagem. ︎↩︎ 8. Entenda os fundamentos da detecção de pessoas por corpo inteiro na visão computacional. ︎↩︎