
Recibo esta pregunta con frecuencia de los integradores que están especificando proyectos de seguridad perimetral. La respuesta importa porque afecta directamente su tasa de falsas alarmas5 y la confianza de su cliente.
Nuestro sistema no depende de un solo modelo. Utiliza un enfoque de fusión de múltiples características que combina detección de cuerpo completo8 para la adquisición de objetivos a larga distancia, un modelo de cabeza y hombros para el filtrado de falsas alarmas a corta distancia y Re-ID para el seguimiento continuo a través de oclusiones. Cada capa maneja un trabajo diferente.
 detección humana cámara PTZ algoritmo IA
detección humana cámara PTZ algoritmo IA
A continuación, detallo cómo funciona cada capa de detección en implementaciones reales, cuándo cada modelo tiene prioridad y cómo puede ajustar el algoritmo para su sitio de proyecto específico. Permítame guiarlo a través de los detalles.
Índice
¿Puede la cámara identificar con precisión a una persona sentada o gateando por el suelo?
Esta es una preocupación real. En sitios de construcción y granjas, las personas no siempre están erguidas. Si su cámara solo busca una forma humana de pie, se perderá eventos críticos.
Sí, la cámara puede detectar a una persona sentada o gateando. El modelo de detección de cuerpo completo utiliza una CNN entrenada en miles de posturas no estándar. Reconoce las proporciones geométricas humanas y las relaciones de las extremidades, no solo una silueta erguida. Cuando la postura es ambigua, el modelo de cabeza y hombros interviene como una verificación secundaria.
 detección de persona sentada gateando cámara PTZ
detección de persona sentada gateando cámara PTZ
Cómo la detección de cuerpo completo maneja posturas no estándar
El modelo de cuerpo completo no busca una única plantilla de “persona de pie”. Analiza las proporciones del cuerpo, los ángulos de las extremidades y los patrones de movimiento. Una persona gateando todavía tiene una relación cabeza-torso, longitud de brazo y longitud de pierna que coinciden con la geometría humana. La CNN fue entrenada en conjuntos de datos que incluyen posturas sentadas, en cuclillas, agachadas y gateando.
En mi experiencia trabajando con integradores de seguridad agrícola, el escenario de gateo surge más de lo que se piensa. Los intrusos a menudo intentan mantenerse bajos cerca de las vallas. Nuestro algoritmo maneja esto porque extrae puntos clave del esqueleto incluso cuando el cuerpo está horizontal. El sistema mapea las posiciones de las articulaciones y verifica si la estructura general coincide con un esqueleto humano.
El papel del análisis de movimiento
La detección de postura estática por sí sola no es suficiente. El sistema también analiza los patrones de movimiento. Una persona gateando se mueve de manera diferente a un perro o a un rodante. El algoritmo observa:
- Velocidad de movimiento en relación con el tamaño del objeto
- Patrones de articulación de las extremidades (brazos y piernas moviéndose en ciclos alternos)
- Cambios de dirección que indican navegación intencional
¿Cuándo se vuelve difícil la detección?
Hay casos límite. Si una persona está acurrucada en una bola apretada y completamente inmóvil, el sistema puede tardar más en clasificar el objetivo. En estas situaciones, la lógica de seguimiento automático de la cámara mantendrá la posición PTZ y esperará el movimiento antes de confirmar la alerta. Esto evita falsos negativos sin inundar la conexión 4G con alarmas inciertas.
Rendimiento de la detección de postura por distancia
| Postura | Rango de detección fiable | Requisito mínimo de píxeles | Nivel de confianza |
|---|---|---|---|
| De pie/Caminando | 20m – 100m | 32×64 píxeles | Alta |
| Sentado/Agachado | 10m – 60m | 48×48 píxeles | Alta |
| Gateando/Tumbado | 5m – 40m | 64×32 píxeles | Medio-Alto |
| Enroscado/Estacionario | 3m – 20m | 48×48 píxeles | Medio |
La conclusión clave aquí es que las posturas no estándar necesitan más píxeles en el encuadre. Es por eso que el zoom óptico 40X zoom óptico7 es importante. El sistema detecta un objetivo potencial en gran angular y luego se acerca para obtener suficiente densidad de píxeles para la clasificación de la postura.
¿Cómo mejora el Re-ID de peatones la consistencia del seguimiento cuando la persona cambia de dirección?
Rastrear a una persona que camina en línea recta es fácil. El verdadero desafío es cuando se dan la vuelta, se agachan detrás de un poste o se cambian de ropa quitándose una chaqueta. El seguimiento de movimiento estándar pierde el objetivo en estos momentos.
Re-ID resuelve esto extrayendo un vector de características de la apariencia del objetivo: color de la ropa, forma del cuerpo, accesorios y forma de caminar. Cuando la persona reaparece después de una oclusión o un cambio de dirección, el sistema compara la nueva detección con los vectores de características almacenados. Si la puntuación de coincidencia está por encima del umbral, el seguimiento se reanuda instantáneamente sin volver a activar una nueva alerta.
![]() peatón Re-ID seguimiento cámara PTZ oclusión
peatón Re-ID seguimiento cámara PTZ oclusión
Qué sucede sin Re-ID
Sin Re-ID, un rastreador básico utiliza la predicción de posición. Adivina dónde estará el objetivo en el siguiente fotograma basándose en la velocidad y la dirección. Cuando la persona gira 180 grados, la predicción falla. El sistema ve entonces un objeto “nuevo” moviéndose en la dirección opuesta. Esto causa dos problemas:
- La PTZ puede girar en la dirección equivocada, perdiendo el objetivo por completo.
- El sistema genera una segunda alerta para la misma persona, desperdiciando ancho de banda en su conexión 4G.
Cómo funciona la extracción de vectores de características
El chip de IA de nuestra cámara ejecuta una red de incrustación ligera junto con el modelo de detección. Para cada objetivo humano confirmado, genera un vector de características de 128 o 256 dimensiones. Piense en esto como una huella digital numérica de la apariencia de la persona.
Este vector codifica:
- Bloques de color dominantes (color de la camisa, color de los pantalones)
- Patrones de textura (rayas, liso, chaleco reflectante)
- Proporciones corporales (relación altura-ancho, ancho de hombros)
- Objetos transportados (mochila, caja de herramientas)
El proceso de coincidencia
Cuando el seguimiento se interrumpe, el sistema almacena el último vector de características conocido. Durante los siguientes 30 a 60 segundos (configurable), cada nueva detección humana en el fotograma se compara con este vector almacenado. La comparación utiliza similitud coseno1. Si la puntuación supera 0.75 (ajustable), el sistema vincula la nueva detección con el seguimiento existente.
Limitaciones de Re-ID a tener en cuenta
Re-ID no es perfecto. Tiene dificultades cuando:
- Varias personas llevan uniformes idénticos (común en obras de construcción)
- Los cambios de iluminación son drásticos entre la detección y la redetección
- La persona se quita o se pone una prenda exterior grande
Para escenarios uniformes, recomiendo habilitar análisis de marcha2 como característica complementaria. Incluso cuando dos trabajadores llevan el mismo chaleco, sus patrones de marcha son lo suficientemente diferentes como para que el sistema mantenga seguimientos separados.
Re-ID vs. Seguimiento de Movimiento Simple
| Característica | Seguimiento de Movimiento Simple | Seguimiento Re-ID |
|---|---|---|
| Maneja el cambio de dirección | No — pierde el objetivo | Sí — coincide por apariencia |
| Maneja oclusiones breves | Parcial — 1-2 segundos como máximo | Sí — hasta 60 segundos |
| Separación multiobjetivo | Débil — las ID a menudo se intercambian | Fuerte — vectores únicos por persona |
| Costo de cómputo | Muy bajo | Moderado |
| Mejor caso de uso | Campo abierto, objetivo único | Sitios complejos, varias personas |
¿La IA activará una alerta si solo se ven las piernas o el torso de una persona en el encuadre?
Esto sucede más de lo que la gente espera. Una persona detrás de un medio muro, una valla o maquinaria estacionada puede mostrar solo partes del cuerpo. Si su sistema necesita un cuerpo completo para activarse, tiene un punto ciego.
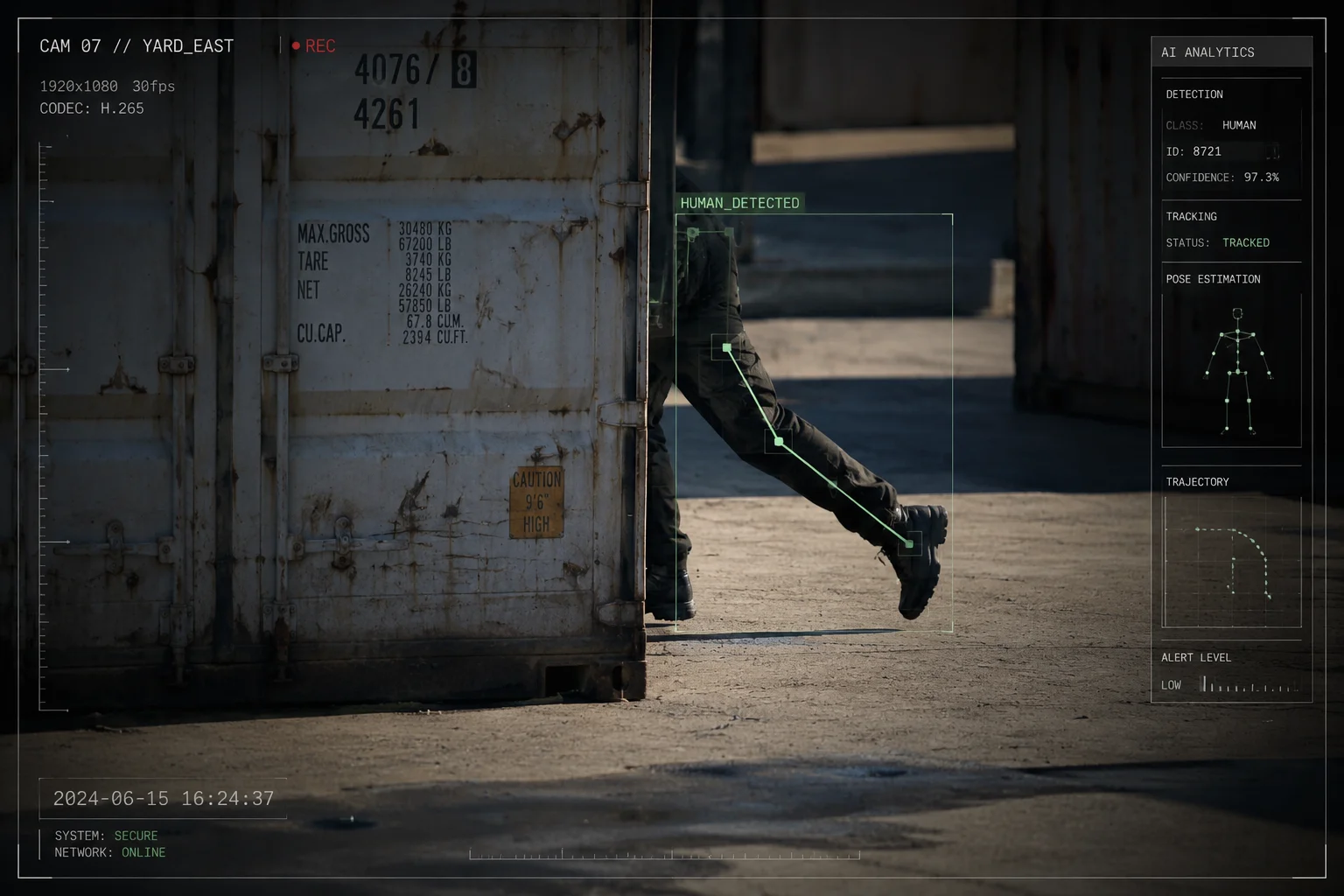
Sí, el sistema activará una alerta ante la visibilidad parcial del cuerpo. El modelo de cabeza y hombros está diseñado específicamente para escenarios en los que solo se ve la parte superior del cuerpo. Para casos en los que solo se ve la parte inferior del cuerpo (piernas visibles debajo de una barrera), el modelo de cuerpo completo utiliza la detección de pares de extremidades, reconociendo dos piernas con patrones de marcha humana como evidencia suficiente para clasificar al objetivo como humano.
 cámara de seguridad con IA de detección de cuerpo parcial
cámara de seguridad con IA de detección de cuerpo parcial
Cómo funciona la detección parcial en la práctica
El pipeline de detección ejecuta múltiples clasificadores en paralelo. No espera una única “persona completa” cuadro delimitador4. En su lugar, busca grupos de partes del cuerpo que estadísticamente pertenecen a un humano.
Solo parte superior del cuerpo (cabeza, hombros, torso)
Este es el caso más fácil. El modelo de cabeza y hombros se construyó exactamente para este escenario. La forma de “U” invertida de la cabeza y los hombros humanos es una de las formas más distintivas de la naturaleza. Ningún animal u objeto común la replica a la misma escala y proporción.
Cuando solo se ve la parte superior del cuerpo:
- El sistema ejecuta primero el clasificador de cabeza y hombros
- Si la confianza supera 0.8, se activa inmediatamente
- Luego, la PTZ intenta hacer zoom o girar para revelar más del objetivo para una confirmación secundaria
Solo parte inferior del cuerpo (piernas, pies)
Esto es más difícil. Dos formas verticales que se mueven en patrones alternos podrían ser piernas humanas, pero también podrían ser postes de cercas balanceándose con el viento. El sistema utiliza tres comprobaciones:
- Relación de aspecto: Las piernas humanas tienen una relación ancho-alto específica que difiere de la de postes o pilares.
- Articulación: Las piernas se doblan por la rodilla. El sistema busca cambios angulares periódicos en un punto medio.
- Frecuencia de marcha: La marcha humana tiene una cadencia de aproximadamente 1.5 a 2.5 pasos por segundo. El sistema comprueba si la frecuencia del movimiento cae dentro de este rango.
Si las tres comprobaciones son correctas, el sistema clasifica el objetivo como “humano probable” y activa una alerta de baja confianza. Luego, ordena a la PTZ que se reposicione para obtener un mejor ángulo.
Solo torso (sin cabeza, sin piernas)
Este es el escenario de detección parcial más desafiante. Un torso sin cabeza ni extremidades podría ser una persona detrás de una pared, o podría ser un objeto en movimiento como un carrito. En este caso, el sistema:
- Marca la detección como “no confirmada”
- Mantiene la PTZ en el objetivo durante 3-5 segundos
- Espera a que aparezca cualquier parte adicional del cuerpo
- Si no aparece evidencia adicional, registra el evento pero no envía una alerta 4G
Este enfoque escalonado mantiene bajo el uso de datos celulares mientras captura amenazas potenciales.
Configuración de la sensibilidad para su sitio
Para sitios con muchos escenarios de vista parcial (almacenes, recintos cercados), recomiendo reducir el umbral de confianza mínimo de 0.8 a 0.65 y habilitar el modo de detección de “cuerpo parcial” en el firmware. Esto aumenta la sensibilidad a costa de tener que revisar algunas alertas más. Para implementaciones en campo abierto donde los cuerpos completos son casi siempre visibles, mantenga el umbral predeterminado para minimizar el ruido.
¿El modelo de cabeza y hombros reduce las falsas alarmas causadas por animales grandes en sitios agrícolas?
Las implementaciones agrícolas son el peor caso para falsas alarmas. Ciervos, coyotes, perros grandes y ganado activan la detección básica de movimiento. Si cada cruce de animales genera una notificación push 4G a las 3 AM, su cliente deshabilitará el sistema en una semana.
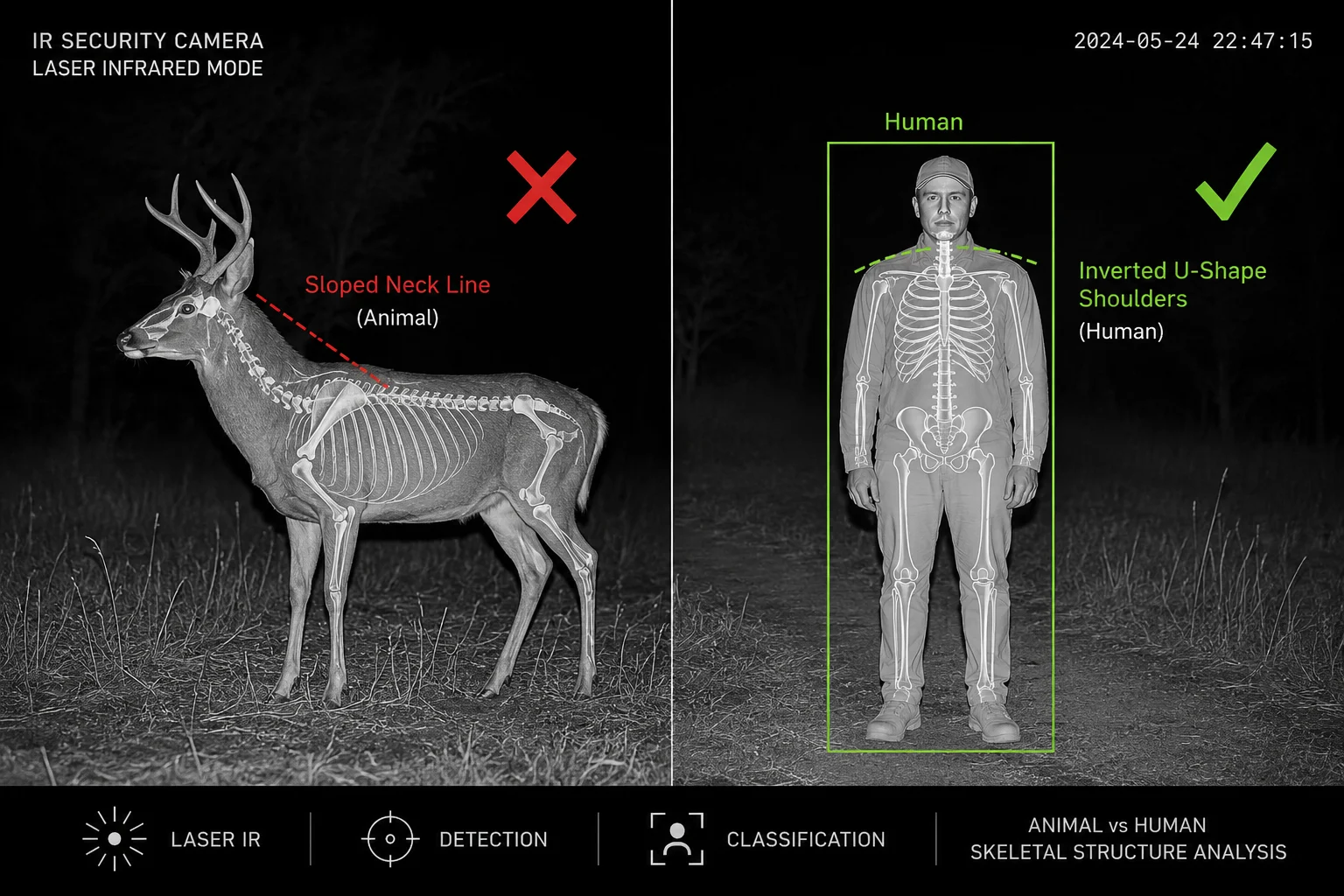
Sí, el modelo de cabeza y hombros reduce drásticamente las falsas alarmas causadas por animales. La diferencia clave es la geometría esquelética: los humanos tienen hombros horizontales perpendiculares a un cuello vertical, formando una forma de “U” invertida. Ningún animal de cuatro patas replica esta estructura. Incluso los animales grandes como ciervos o caballos tienen una línea inclinada del cuello a la espalda que el modelo filtra explícitamente.
 cámara de seguridad agrícola filtro de animales de falsas alarmas
cámara de seguridad agrícola filtro de animales de falsas alarmas
Por qué los animales engañan a la detección básica
La detección básica de movimiento e incluso algunos sistemas de “detección humana” de gama baja utilizan el tamaño simple del cuadro delimitador como su filtro principal. Un ciervo grande a 30 metros produce un cuadro delimitador de tamaño similar a un humano a 50 metros. Sin análisis de forma, el sistema no puede distinguirlos.
Algunas cámaras económicas utilizan un detector de una sola etapa que solo comprueba “¿es este objeto lo suficientemente grande y se está moviendo?”. Ese enfoque falla por completo en granjas y sitios rurales.
Cómo nuestro enfoque de múltiples capas resuelve esto
El proceso de detección para el modo granja funciona de la siguiente manera:
- Disparador de movimiento: Algo se mueve en el cuadro. El sistema se activa.
- Prefiltro de cuerpo entero: ¿La relación de aspecto y la velocidad de movimiento del objeto son consistentes con un humano? Si es así, continúe. Si el objeto se mueve sobre cuatro patas o tiene un eje corporal horizontal, se marca como “animal” y se suprime.
- Confirmación de cabeza y hombros: ¿La parte superior del objeto muestra el patrón invertido en “U”? Esta es la verificación decisiva.
- Validación de tamaño: ¿El tamaño en píxeles del objeto está dentro del rango esperado para un humano a esa distancia? (Usando la distancia focal y el ángulo de inclinación conocidos de la cámara para estimar la distancia).
Diferencias estructurales entre animales y humanos
El modelo de cabeza y hombros explota diferencias anatómicas fundamentales:
- Humanos: Cuello vertical, línea de hombros horizontal, cabeza centrada sobre los hombros
- Ciervos/Caballos: El cuello se extiende hacia adelante en un ángulo de 45-60 grados, sin línea de hombros horizontal
- Perros/Coyotes: La cabeza está delante del centro del cuerpo, el ancho de los hombros es estrecho en relación con la longitud del cuerpo
- Osos (de pie): Más cercano a la forma humana, pero la relación hombro-cabeza y la posición del brazo difieren significativamente
Reducción de Falsas Alarmas en el Mundo Real
Basado en datos de campo de instalaciones agrícolas en Texas y Alberta, habilitar el filtro de cabeza y hombros reduce las falsas alarmas provocadas por animales en un 85-95%. El 5-15% restante de falsas alarmas provienen típicamente de:
- Osos de pie (raro pero posible)
- Aves grandes aterrizando en postes de cercas a corta distancia (la silueta se asemeja brevemente a una cabeza)
- Espantapájaros o maniquíes (estos se detectan correctamente como “con forma humana”, el sistema no puede saber que no son reales)
Configuración de Granja Recomendada
| Configuración | Valor recomendado | Razón |
|---|---|---|
| Modo de detección | Prioridad cabeza-hombro | Filtra cuadrúpedos eficazmente |
| Tamaño mínimo de píxeles | 40×40 | Ignora animales pequeños (conejos, pájaros) |
| Sensibilidad al movimiento | Medio | Reduce disparadores de viento/vegetación |
| Enfriamiento de alerta | 30 segundos | Previene alertas repetidas del mismo animal |
| Modo nocturno | Láser IR + asistencia térmica | Mantiene la claridad de la forma en la oscuridad |
Para proyectos agrícolas, también sugiero configurar el indicador de “supresión de animales” en el firmware. Esto agrega 200 ms adicionales de tiempo de procesamiento por detección, pero reduce el volumen de falsas alarmas en un orden de magnitud. En una conexión 4G donde cada alerta consume ancho de banda y batería, esa compensación vale la pena cada vez.
Conclusión
Detección humana en nuestro Cámaras PTZ6 no es un algoritmo único, es un sistema en capas. La detección de cuerpo completo maneja el largo alcance. El filtrado de cabeza y hombros elimina las falsas alarmas. Re-ID mantiene el seguimiento a través de oclusiones. Juntos, ofrecen un rendimiento confiable en proyectos de seguridad agrícola, de construcción y perimetral.
1. Definición y uso de la similitud del coseno para comparar vectores de características en recuperación y coincidencia. ︎↩︎ 2. Aprenda cómo se utilizan los patrones de marcha como biométricos para la identificación humana. ︎↩︎ 3. Comprensión de la relación de aspecto en el procesamiento de imágenes para la detección y clasificación de objetos. ︎↩︎ 4. Concepto de cuadros delimitadores utilizados en la detección de objetos para localizar objetos dentro de una imagen. ︎↩︎ 5. Definición general de falsas alarmas y su impacto en la confiabilidad del sistema de seguridad. ︎↩︎ 6. Introducción a las cámaras pan-tilt-zoom y sus aplicaciones en vigilancia. ︎↩︎ 7. Explicación del zoom óptico frente al zoom digital en dispositivos de imagen. ︎↩︎ 8. Comprenda los fundamentos de la detección de personas de cuerpo completo en visión por computadora. ︎↩︎