
He visto Cámaras PTZ1 mirar fijamente una pared en blanco durante lo que pareció una eternidad después de perder un objetivo. Es frustrante y desperdicia batería en sitios solares.
Una cámara PTZ industrial típica espera entre 15 y 30 segundos en una obstrucción antes de regresar a su posición inicial. Este tiempo de espera es ajustable en la configuración del firmware. Antes de que comience el tiempo de espera, la cámara pasa de 3 a 10 segundos utilizando algoritmos de predicción para encontrar el objetivo nuevamente.
 Cámara PTZ esperando en una obstrucción antes de regresar a su posición inicial
Cámara PTZ esperando en una obstrucción antes de regresar a su posición inicial
A continuación, desglosaré exactamente cómo funciona esta lógica de espera, cómo puede personalizarla y qué configuraciones tienen sentido para diferentes entornos de implementación. Ya sea que esté operando un sitio alimentado por energía solar en el área rural de Texas o la entrada de un almacén concurrido, estos detalles importan.
Índice
¿Puedo personalizar el “Tiempo de espera” (por ejemplo, de 5 a 30 segundos) para que un objetivo emerja de detrás de una pared?
Sí, puedes. He configurado esta opción en docenas de implementaciones, y hacerlo bien ahorra batería y reduce el desgaste innecesario del motor de la PTZ8.
La mayoría de las cámaras PTZ industriales le permiten establecer un tiempo de espera personalizado entre 5 y 60 segundos a través de la interfaz web. Busque la opción ‘Tiempo de espera de seguimiento2‘ o ‘Retraso de retorno’ en el menú de Seguimiento Inteligente. El valor correcto depende de las condiciones de su sitio.
![]() Interfaz de configuración del tiempo de espera de la cámara PTZ
Interfaz de configuración del tiempo de espera de la cámara PTZ
Dónde encontrar la configuración
En la mayoría de los firmwares profesionales de PTZ, el tiempo de espera se encuentra en Seguimiento Inteligente > Tiempo de espera de seguimiento en el panel de configuración web. Algunos fabricantes lo denominan “Tiempo de permanencia” o “Retraso de objetivo perdido”. La configuración controla cuánto tiempo la cámara mantiene su posición actual después de que la IA pierde de vista el objetivo.
Cómo elegir el valor correcto
El tiempo de espera correcto depende de su entorno. Una entrada minorista concurrida necesita un tiempo de espera corto. Una puerta de granja remota necesita una más larga. Así es como lo pienso:
| Tipo de sitio | Tiempo de espera recomendado | Razón |
|---|---|---|
| Entrada de alto tráfico | 5s – 10s | Evita que la cámara ignore nuevas amenazas mientras mira a la nada |
| Perímetro estándar | 15s – 20s | Enfoque equilibrado para la mayoría de los sitios comerciales |
| Sitio remoto/alimentado por energía solar | 20s – 30s | Da tiempo al objetivo para que reaparezca; conserva los ciclos del motor |
| Campo abierto con actividad escasa | 30s – 60s | Maximiza la posibilidad de readquisición en áreas de bajo tráfico |
Por qué esto es importante para implementaciones solares 4G
En un sitio 4G con energía solar, cada movimiento PTZ consume energía. Si su tiempo de espera es demasiado corto, la cámara vuelve a su posición inicial y, de inmediato, detecta a la misma persona saliendo de detrás de un camión. Ahora se está moviendo de nuevo. Eso son dos ciclos de motor en lugar de uno.
Recomiendo de 15 a 20 segundos para la mayoría de los sitios solares 4G. Esto le da al sistema tiempo suficiente para capturar una instantánea de alarma y transmitirla a través de 4G antes de que la cámara se mueva. También evita la rotación excesiva del motor que agota su banco de baterías.
La espera de dos fases
Lo que la mayoría de la gente no se da cuenta es que el “tiempo de espera” en realidad tiene dos fases. La primera fase es la fase de predicción (3 a 10 segundos), donde la cámara utiliza un Filtro de Kalman3 para adivinar a dónde fue el objetivo. Durante esta fase, la PTZ aún puede moverse ligeramente, siguiendo la ruta predicha. La segunda fase es la espera estática (su tiempo de espera configurado), donde la cámara permanece quieta y espera. Solo después de que ambas fases se completen, la cámara regresa a su posición inicial.
Por lo tanto, si establece su tiempo de espera en 15 segundos, la espera total real podría ser de 18 a 25 segundos si se incluye la fase de predicción.
¿Escaneará la cámara el área circundante antes de darse por vencida con un objetivo oculto?
Solía asumir que la cámara simplemente se quedaba allí sin hacer nada durante el período de espera. Así es como funciona el seguimiento moderno de IA.
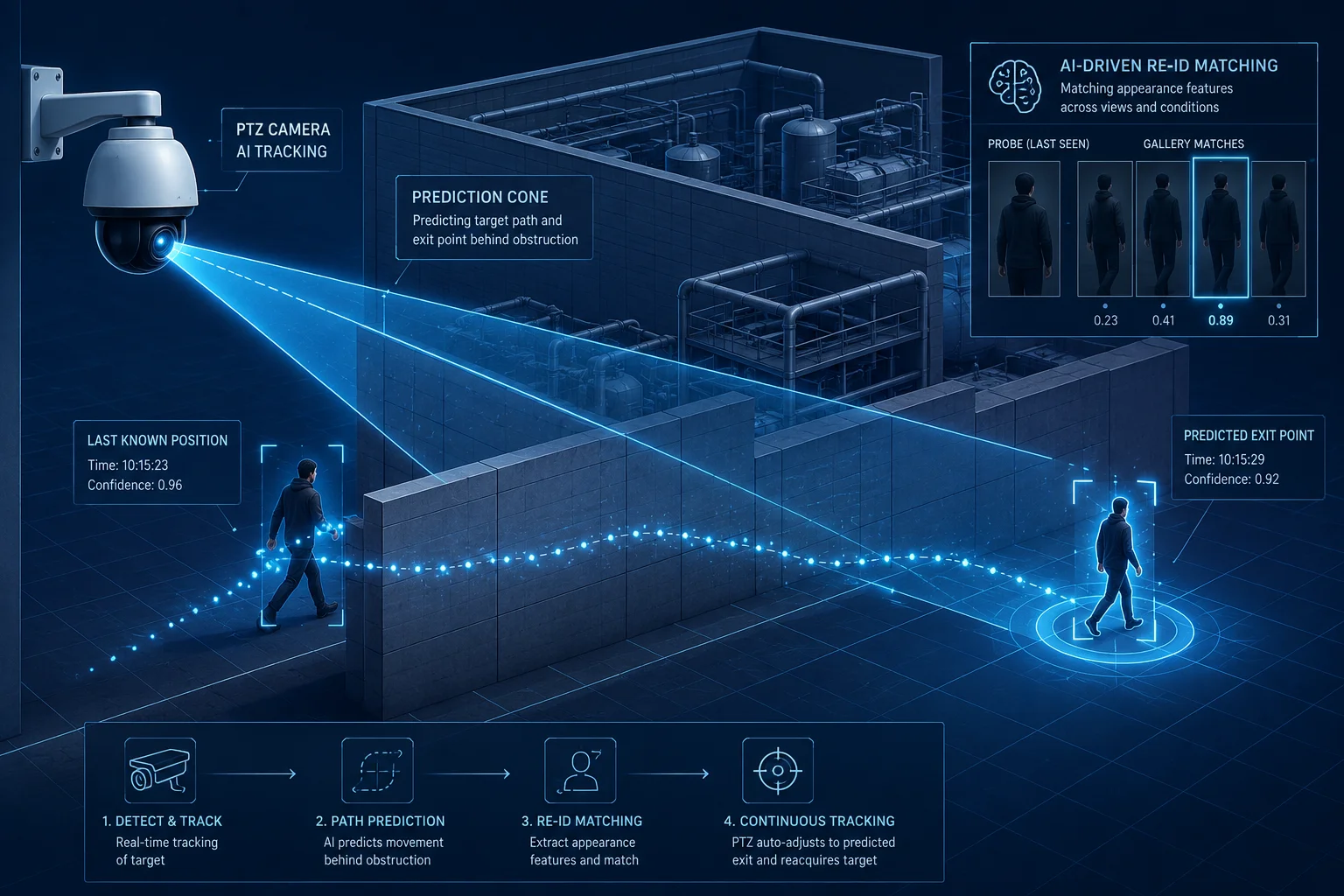
Las cámaras PTZ avanzadas realizan un escaneo limitado durante la fase de predicción. El sistema utiliza la última velocidad y dirección conocidas del objetivo para barrer un área pequeña alrededor del punto de obstrucción. Si Re-ID (re-identificación)4 está habilitado, la cámara busca activamente características coincidentes en zonas cercanas.
 Área de escaneo de la cámara PTZ alrededor de la obstrucción
Área de escaneo de la cámara PTZ alrededor de la obstrucción
Qué sucede durante la fase de predicción
Cuando un objetivo desaparece detrás de una pared o un vehículo, el algoritmo de seguimiento no se congela. Calcula dónde debería aparecer el objetivo basándose en tres entradas:
- Última velocidad conocida
- Última dirección de viaje conocida
- Ancho de la obstrucción (estimado a partir de la imagen)
La cámara luego se desplaza ligeramente hacia el punto de salida predicho. Es por eso que a veces ve que una PTZ “deriva” unos grados después de perder un objetivo. No es un fallo. Es el motor de predicción funcionando.
Re-ID: el paso de coincidencia de características
Si su cámara admite Re-ID (Re-Identificación), el sistema almacena una instantánea de las características del objetivo antes de que desaparezca. Esto incluye la forma del cuerpo, el color de la ropa y el patrón de movimiento. Cuando cualquier objeto emerge cerca de la obstrucción, el sistema lo compara con este perfil almacenado.
Lo que la cámara NO hace
La cámara no realizará un escaneo completo de 360 grados en busca del objetivo perdido. Eso desperdiciaría demasiado tiempo y energía. El escaneo se limita a un cono estrecho, típicamente de 10 a 20 grados a cada lado de la ruta predicha.
| Comportamiento del escaneo | ¿Habilitado por defecto? | ¿Ajustable? |
|---|---|---|
| Panorámica predictiva hacia el punto de salida | Sí | No (controlado por algoritmo) |
| Coincidencia de características Re-ID | Depende del modelo | Sí (habilitar en la configuración de IA) |
| Barrido de área completa | No | Se puede programar a través del SDK |
| Comprobación multizona | No | Sí (con enlace de preajustes) |
Cuando el escaneo falla
El escaneo funciona bien para obstrucciones delgadas como postes, árboles o vehículos individuales. Lucha con obstrucciones anchas como edificios o muros largos. Si el objetivo entra en un edificio, ningún escaneo ayudará. En estos casos, la cámara se rinde correctamente después del tiempo de espera y regresa a casa.
Para sitios con obstrucciones anchas conocidas, recomiendo configurar posiciones preestablecidas al otro lado del edificio. Puede vincular estos preajustes a la lógica de seguimiento para que la cámara salte a una posición de “comprobación” antes de regresar a casa.
¿Cómo evita la lógica de “Retorno Inteligente” que la cámara regrese demasiado rápido?
He visto cámaras PTZ baratas volver a casa al instante en que pierden un objetivo. Se ve terrible en la reproducción y se pierde el objetivo la mitad de las veces cuando reaparecen dos segundos después.
Lógica de retorno inteligente5 añade un sistema de retardo gradual que evita el retroceso inmediato. La cámara mantiene la posición durante un período configurable y luego realiza una transición suave de regreso a la posición inicial a velocidad reducida. Esto le da al sistema una última oportunidad de recuperar el objetivo durante el movimiento de retorno.
 Lógica de retorno inteligente PTZ que evita el retroceso rápido
Lógica de retorno inteligente PTZ que evita el retroceso rápido
Las tres salvaguardias contra el retorno prematuro
Las cámaras PTZ de nivel profesional utilizan tres capas para evitar el problema del “retroceso”:
Salvaguardia 1: Tiempo mínimo de espera
Incluso si el tiempo de espera de seguimiento está configurado en 5 segundos, la mayoría del firmware aplica una espera mínima de 3 segundos. Esto está codificado de forma rígida. La cámara físicamente no puede regresar a la posición inicial más rápido que esto. Existe para evitar el estrés mecánico en los motores de paneo/inclinación.
Salvaguardia 2: Velocidad de retorno lenta
Cuando la cámara regresa a la posición inicial, no se mueve a toda velocidad. Smart Return reduce la velocidad de paneo a aproximadamente 30% de la máxima durante el viaje de regreso. ¿Por qué? Porque si el objetivo reaparece durante el movimiento de retorno, la cámara necesita tiempo para detectarlo e invertir la dirección. Una cámara que se mueve a toda velocidad se pasaría de largo.
Salvaguardia 3: Ventana de readquisición
Durante el retorno lento, el motor de IA permanece activo. Si detecta un objetivo coincidente en cualquier lugar del cuadro durante el movimiento de retorno, cancela el retorno y vuelve a bloquearlo. Este es el mecanismo de “última oportunidad”. Lo he visto capturar objetivos que salieron de detrás de un camión justo cuando la cámara comenzaba a regresar.
Cómo esto le ahorra dinero
Para los integradores que facturan por proyecto, una cámara que retrocede demasiado rápido significa eventos perdidos. Eventos perdidos significan clientes insatisfechos. Clientes insatisfechos significan devoluciones de llamada de garantía. Cada viaje en furgoneta a un sitio remoto cuesta entre 200 y 500 dólares. La lógica de Smart Return no es solo una característica de conveniencia. Reduce directamente su tasa de devoluciones de llamada.
Configuración de Smart Return
En la mayoría de las interfaces de firmware, Smart Return es un interruptor en PTZ > Acción inactiva > Modo de retorno. Verá opciones como:
- Retorno inmediato: La cámara regresa a toda velocidad (no recomendado)
- Devolución Inteligente: La cámara utiliza retardo gradual y velocidad lenta
- Retorno Retrasado: La cámara espera el tiempo de espera completo y luego regresa a velocidad normal.
Siempre recomiendo el Retorno Inteligente para cualquier sitio donde la precisión del seguimiento sea importante.
¿Puedo activar un preset de “Punto Ciego” si el objetivo desaparece en una dirección específica?
Aquí es donde las cosas se ponen interesantes. El seguimiento estándar simplemente se rinde y se va a casa. Pero con enlace preestablecido6, puedes hacer que la cámara sea más inteligente que eso.
Sí, puedes configurar activadores preestablecidos basados en la dirección. Si un objetivo desaparece moviéndose hacia la izquierda, la cámara puede saltar al Preestablecido 2 (que cubre el punto ciego izquierdo). Si desaparecen moviéndose hacia la derecha, salta al Preestablecido 3. Esto requiere configuración a nivel de SDK o firmware avanzado que admita enlace preestablecido direccional9.
 Configuración de preestablecidos de punto ciego PTZ
Configuración de preestablecidos de punto ciego PTZ
Cómo funciona el enlace preestablecido direccional
El concepto es simple. Divides el campo de visión de la cámara en zonas. Cada zona tiene una “dirección de escape” asociada. Cuando se pierde un objetivo en una zona específica, la cámara no regresa a casa. En cambio, salta a un preestablecido que cubre hacia dónde es probable que haya ido el objetivo.
Configuración de la lógica
Aquí está el flujo de trabajo básico:
-
Define tus preestablecidos. Establece el Preestablecido 1 como la vista de tu puerta principal. Establece el Preestablecido 2 como el lado izquierdo del edificio. Establece el Preestablecido 3 como el área de estacionamiento derecha.
-
Mapea las direcciones de escape. En el SDK o en la configuración avanzada, crea reglas:
- Objetivo perdido moviéndose a la IZQUIERDA → Ir al Preestablecido 2, mantener 10 segundos
- Objetivo perdido moviéndose a la DERECHA → Ir al Preestablecido 3, mantener 10 segundos
- Objetivo perdido moviéndose HACIA la cámara → Permanecer en el lugar (pueden estar acercándose)
- No se vuelve a adquirir después de la retención → Volver a Inicio (Preajuste 1)
-
Establezca los tiempos de retención para cada preajuste. Cada preajuste de punto ciego debe tener su propio tiempo de permanencia. Un callejón estrecho podría necesitar solo 5 segundos. Un estacionamiento amplio podría necesitar 15.
Cuándo usar esta función
| Escenario | Beneficio de los preajustes de punto ciego |
|---|---|
| Dos puntos de entrada visibles desde un montaje | La cámara verifica la segunda entrada antes de regresar a casa |
| El objetivo camina detrás de un edificio | La cámara salta al otro lado para atraparlos saliendo |
| El vehículo entra en un muelle de carga | La cámara se mueve al muelle de salida para esperar la partida |
| Una persona se acerca a una valla | La cámara se mueve hacia la puerta para ver si entran |
Limitaciones a tener en cuenta
Esta función no está disponible en todas las cámaras. Los modelos económicos carecen de la lógica de firmware para la vinculación de preajustes direccionales. Necesitará una cámara que admita alguna de las siguientes opciones:
- Un SDK abierto con llamadas a preajustes activadas por eventos
- “Enlace inteligente” o “Lógica de patrulla” integrados con reglas condicionales
Nuestro Cámaras de seguimiento con IA de doble lente7 admiten esto a través de la interfaz SDK. La lente fija mantiene la vista amplia mientras que la lente PTZ ejecuta el salto de preajuste. Esto significa que nunca pierde la conciencia situacional, incluso durante la verificación del punto ciego.
Un ejemplo del mundo real
Imagine una cámara con energía solar en la puerta de una granja. La vista principal cubre la puerta. Pero hay un hueco en la valla a 30 metros a la izquierda. Sin preajustes de punto ciego, una persona que camina hacia la izquierda y desaparece detrás del granero simplemente se pierde. La cámara regresa a casa después de 20 segundos.
Con los preajustes de punto ciego, la cámara detecta el movimiento hacia la izquierda, salta a la vista de la brecha de la valla y se mantiene durante 10 segundos. Si la persona aparece en la brecha, la cámara la captura. Si no, regresa a casa. Tiempo extra total: 10 segundos. Costo de energía extra total: mínimo. Pero la tasa de detección para esa ruta de amenaza específica pasa de 0% a más de 70%.
Conclusión
Las cámaras PTZ esperan de 15 a 30 segundos en una obstrucción antes de regresar a casa. Puede personalizar este tiempo de espera, habilitar el escaneo inteligente, configurar velocidades de retorno graduadas y configurar preajustes de punto ciego direccionales para maximizar las tasas de detección en su sitio.
1. Conozca las cámaras Pan-Tilt-Zoom y sus aplicaciones en videovigilancia. ︎↩︎ 2. Configure la duración que la cámara espera antes de regresar a casa después de perder un objetivo. ︎↩︎ 3. Comprenda cómo los filtros de Kalman predicen el movimiento del objetivo en los sistemas de seguimiento. ︎↩︎ 4. Descubra cómo Re-ID empareja objetos entre diferentes vistas de cámara. ︎↩︎ 5. Aprenda cómo Smart Return evita el retroceso abrupto y mejora la readquisición. ︎↩︎ 6. Configure posiciones preestablecidas para mover la cámara automáticamente según los eventos. ︎↩︎ 7. Explore cámaras con lentes fijos y PTZ para una vista amplia continua y seguimiento. ︎↩︎ 8. Aprenda a extender la vida útil de los motores PTZ reduciendo los movimientos innecesarios. ︎↩︎ 9. Configure la cámara para que salte a preajustes específicos según la dirección en la que se pierde un objetivo. ︎↩︎