
I have seen many projects fail because the camera was too slow to react. I do not want a target to escape just because the PTZ hesitated for one second.
Yes. A well-built industrial PTZ can keep up with a fast-running person above 5m/s and a slow vehicle. It does this through high motor speed, strong torque, prediction logic, and smart zoom control.
![]() PTZ tracking speed and AI tracking
PTZ tracking speed and AI tracking
I have worked with buyers who care about one thing above all else: stable tracking in real use. That is why I focus on what the camera can do when a person runs hard or a vehicle moves and changes speed.
Table of Contents
What is the maximum “Degrees Per Second” (DPS) the PTZ can maintain during AI tracking?
I have heard this question many times from system integrators. A camera can look good on a spec sheet, but I need to know if it can actually turn fast enough when the target moves.
During AI tracking, a strong industrial PTZ can usually maintain about 240°/s to 300°/s in preset movement, while tracking speed in real AI use depends on load, zoom level, target angle, and control logic.
 PTZ degrees per second during AI tracking
PTZ degrees per second during AI tracking
I do not judge tracking by one speed number alone. I look at the full chain. Motor speed matters, but motor torque1 matters too. Control delay matters. Lens zoom level matters. Even the distance to the target changes how fast the camera must rotate to keep the target centered. A person running close to the camera creates a much faster angle change than a person far away. A slow vehicle in a parking lot is easier, but it still needs smooth and steady motion, not a sharp and ugly swing.
Why DPS is not the whole story
I think many buyers make the same mistake. They ask for a big number, but they do not ask how that number was tested. A PTZ may reach a high preset speed when it moves from point A to point B. But AI tracking2 is different. The camera must move, stop, adjust, and correct at the same time. That needs a good controller and a stable motor.
| Factor | Why it matters | My view |
|---|---|---|
| Motor speed | Helps the camera turn fast | Needed, but not enough |
| Motor torque | Helps the camera resist load | Very important |
| AI latency | Affects how fast tracking reacts | Must stay low |
| Zoom level | Changes the tracking angle | Higher zoom needs more care |
| Target distance | Changes angular speed demand | Near targets are harder |
I usually explain this to David Miller in a simple way. If he is watching a runner at 15 meters, the camera must move much faster than if it is watching the same runner at 80 meters. The target speed in the real world stays the same, but the camera angle changes more at short range. That is why I care about both the mechanical side and the software side. I also care about the stability of the video stream, because a fast but shaky image is still a bad image. In my view, the best PTZ is not the one that only turns fast. It is the one that turns fast, stays smooth, and keeps the target in frame.
Will the camera lose the track if a vehicle accelerates rapidly within the parking lot?
I know this fear well. A vehicle can look calm for a moment and then speed up fast. If the camera reacts too late, the plate, the driver, or the vehicle shape can slip out of view.
A good PTZ should not lose track just because a vehicle accelerates quickly. It should use motion prediction3, speed updates, and target re-lock logic4 to follow the change without breaking the track.
 AI vehicle tracking in parking lot
AI vehicle tracking in parking lot
I always say that sudden acceleration is not the main enemy. Delay is the main enemy. When a vehicle changes speed fast in a parking lot, the AI must detect that new motion right away. Then the controller must push the motor to catch up. If the system only reacts after the vehicle has already moved far away, the track will drift. If the system predicts the next position, the camera can stay on target.
What happens when a vehicle speeds up
I break this into three steps.
| Step | What the camera sees | What the system should do |
|---|---|---|
| 1 | Vehicle moves slowly | Keep the target centered |
| 2 | Vehicle starts to accelerate | Increase tracking response |
| 3 | Vehicle turns or leaves fast | Predict the next position and follow |
I have found that parking lots are a good test scene. Cars often stop, start, turn, and reverse. That means the AI must understand more than simple straight motion. It must separate a real target from a background object. It must also avoid chasing shadows or another moving car. This is where a strong tracking model helps. I want the system to keep the lock even when the speed changes. If the vehicle briefly blocks part of the view, the camera should keep guessing its path for a short time. That short memory is very useful in real projects.
For David Miller, this matters because a lost track can cause a real project problem. It can mean missed evidence, bad coverage, or a weak demo during acceptance testing. I do not want the camera to panic when the target moves fast. I want it to stay calm, correct the angle, and recover fast if the target slips for a moment. That is why I value good acceleration handling, fast re-lock, and clean motion logic.
How does the motor’s “Acceleration Curve” help in catching up with a fast-moving target?
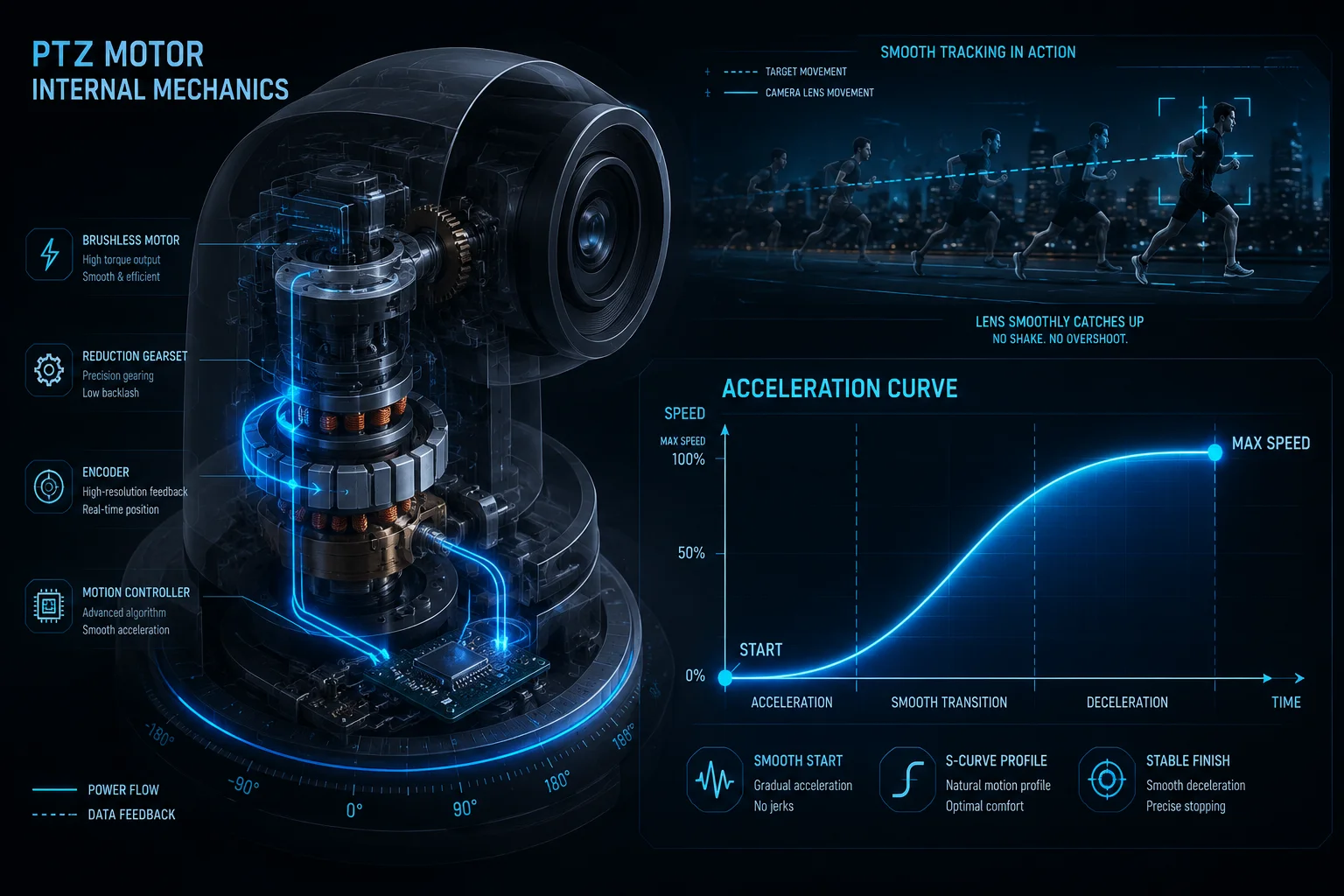
I pay close attention to the acceleration curve5 because it controls how the camera starts moving. A camera that jumps too hard can shake. A camera that starts too soft can fall behind.
The acceleration curve helps the PTZ catch a fast target by controlling how quickly the motor ramps up speed. It reduces jerk6, protects the mechanism, and lets the camera reach tracking speed smoothly and fast.
 PTZ motor acceleration curve
PTZ motor acceleration curve
I like to explain the acceleration curve as the camera’s “running style.” Some people sprint too hard from the start and get tired fast. Some people start too slow and never catch up. A good PTZ finds the middle point. It starts with a controlled push, then builds speed fast, and then settles into smooth tracking. That is much better than a harsh start.
Why smooth acceleration matters
If I make the motor too aggressive, the image can jump. If I make it too soft, the target can escape before the camera reaches the right angle. So I want a curve that matches the target motion and the lens load. This is even more important when the zoom is high, because a small angle error becomes a big frame error.
| Acceleration style | Result | My note |
|---|---|---|
| Too slow | Track lag | Bad for runners |
| Too sharp | Image shake | Bad for verification |
| Balanced curve | Smooth catch-up | Best for real use |
I also care about torque reserve7. The motor needs enough power to move the lens assembly without delay. In a real project, wind, cable drag8, and cold weather can all make movement harder. A good acceleration curve gives the camera a better chance to stay on target under those real conditions. I often tell buyers that the curve is not just a mechanical detail. It is part of the full tracking experience. When the curve is right, the camera feels smart. It does not feel rushed. It does not feel weak. It just follows.
Is the tracking speed dynamically adjusted based on the target’s distance from the lens?
I think this is one of the most important questions for real tracking work. A camera does not see the world in the same way at 10 meters and 100 meters.
Yes. Tracking speed should be dynamically adjusted based on distance. Near targets need faster angle changes, while far targets need smaller, smoother corrections.
 Dynamic PTZ tracking distance adjustment
Dynamic PTZ tracking distance adjustment
I use distance as a key input because it changes the camera’s job. A person running close to the lens creates a huge movement in the frame. The PTZ must turn fast and keep the target from leaving the edge. A far target can move at the same real-world speed, but the frame shift is slower. In that case, the camera should not overreact. If it overreacts, the image can feel nervous and unstable.
How distance changes control behavior
I usually think about three distance zones.
| Distance zone | Tracking behavior | What I expect |
|---|---|---|
| Near range | Fast angle correction | Strong response needed |
| Mid range | Balanced tracking | Best general use |
| Far range | Small smooth changes | Stability matters more |
This is where smart software makes a big difference. A simple system may use one fixed speed for everything. That often works badly. It can be too slow for a close runner and too fast for a far vehicle. A smarter system adjusts the control gain, the motor speed, and sometimes even the zoom behavior. It can also use target size and target motion to improve the result. I like systems that behave differently in different scenes, because real scenes are never the same.
For example, in a farm, a target may be far away for most of the time. In a yard or parking lot, the target may move close to the camera very fast. The same PTZ must handle both. That is why I prefer dynamic tracking logic over fixed logic. It gives better image quality, better target lock, and fewer useless movements. For buyers like David Miller, that means fewer false alarms, fewer site visits, and less time spent tuning the system by hand.
Can AI tracking handle both people and vehicles in the same system?
I ask this because many projects need one camera to do many jobs. A site may have people walking, cars entering, and service vehicles turning at the same time.
Yes. A strong AI PTZ can handle both people and vehicles if it uses different detection rules, good tracking logic, and proper scene tuning.
I do not want a camera that treats a person like a truck or a truck like a person. The movement patterns are different. A person can stop fast, change direction fast, and run in short bursts. A vehicle usually has a larger body, a different speed range, and a wider turn radius. The AI should know this. It should not use the same response for every target.
Why target type matters
| Target type | Motion style | Tracking need |
|---|---|---|
| Person | Fast changes, small body | Quick response |
| Vehicle | Stable body, faster movement | Smooth follow |
| Mixed scene | Many objects at once | Strong filtering |
I have seen projects improve a lot when the system uses separate target classes. The camera can follow a person without jumping to a nearby car. It can also keep tracking a vehicle even if a person walks across the scene. That kind of stability is very important in security jobs. It lowers false alarms and helps the operator trust the system.
Conclusion
I believe the best PTZ tracking is fast, smooth, and smart. It keeps up with people and vehicles because it uses speed, torque, prediction, and distance-aware control together.
1. Motor torque determines how well a PTZ can resist load and move its lens assembly quickly. ↩︎ 2. AI tracking uses algorithms to automatically follow moving targets, essential for PTZ cameras. ↩︎ 3. Motion prediction algorithms estimate the next position of a target, helping the PTZ stay locked on during acceleration. ↩︎ 4. Target re-lock logic allows the camera to quickly reacquire a target if it briefly leaves the frame. ↩︎ 5. The acceleration curve controls how quickly the PTZ motor ramps up, affecting smoothness and speed of tracking. ↩︎ 6. Jerk is the rate of change of acceleration; reducing jerk prevents image shake during PTZ starts and stops. ↩︎ 7. Torque reserve ensures the motor has enough power to overcome environmental loads like wind or cable drag. ↩︎ 8. Cable drag adds resistance to PTZ movement, especially in windy conditions, affecting tracking performance. ↩︎