
Ich habe viele Projekte scheitern sehen, weil die Kamera zu langsam reagierte. Ich möchte nicht, dass ein Ziel entkommt, nur weil der PTZ eine Sekunde zögerte.
Ja. Ein gut konstruierter industrieller PTZ kann mit einer schnell laufenden Person über 5 m/s und einem langsamen Fahrzeug mithalten. Dies geschieht durch hohe Motorgeschwindigkeit, starkes Drehmoment, Vorhersage-Logik und intelligente Zoom-Steuerung.
![]() PTZ-Tracking-Geschwindigkeit und KI-Tracking
PTZ-Tracking-Geschwindigkeit und KI-Tracking
Ich habe mit Käufern zusammengearbeitet, denen vor allem eines wichtig ist: stabiles Tracking im realen Einsatz. Deshalb konzentriere ich mich darauf, was die Kamera leisten kann, wenn eine Person hart läuft oder ein Fahrzeug sich bewegt und die Geschwindigkeit ändert.
Inhaltsübersicht
Was ist die maximale “Grad pro Sekunde” (DPS), die der PTZ während des KI-Trackings aufrechterhalten kann?
Diese Frage habe ich schon oft von Systemintegratoren gehört. Eine Kamera kann auf dem Datenblatt gut aussehen, aber ich muss wissen, ob sie sich tatsächlich schnell genug drehen kann, wenn sich das Ziel bewegt.
Während des KI-Trackings kann ein starker industrieller PTZ in der Voreinstellung normalerweise etwa 240°/s bis 300°/s beibehalten, während die Tracking-Geschwindigkeit im realen KI-Einsatz von Last, Zoomstufe, Zielwinkel und Steuerungslogik abhängt.
 PTZ-Grad pro Sekunde während des KI-Trackings
PTZ-Grad pro Sekunde während des KI-Trackings
Ich beurteile das Tracking nicht nur anhand einer Geschwindigkeitszahl. Ich betrachte die gesamte Kette. Motorgeschwindigkeit ist wichtig, aber Motordrehmoment1 ist auch wichtig. Steuerungsverzögerung ist wichtig. Die Zoomstufe der Linse ist wichtig. Sogar die Entfernung zum Ziel ändert, wie schnell sich die Kamera drehen muss, um das Ziel zentriert zu halten. Eine Person, die nahe an der Kamera läuft, erzeugt eine viel schnellere Winkeländerung als eine Person, die weit entfernt ist. Ein langsames Fahrzeug auf einem Parkplatz ist einfacher, aber es erfordert immer noch eine sanfte und gleichmäßige Bewegung, keinen scharfen und unschönen Schwenk.
Warum DPS nicht alles ist
Ich denke, viele Käufer machen den gleichen Fehler. Sie fragen nach einer hohen Zahl, aber sie fragen nicht, wie diese Zahl getestet wurde. Ein PTZ kann eine hohe Voreinstellungsgeschwindigkeit erreichen, wenn er sich von Punkt A nach Punkt B bewegt. Aber KI-Tracking2 ist anders. Die Kamera muss sich gleichzeitig bewegen, anhalten, anpassen und korrigieren. Das erfordert einen guten Controller und einen stabilen Motor.
| Faktor | Warum es wichtig ist | Meine Ansicht |
|---|---|---|
| Motorgeschwindigkeit | Hilft der Kamera, sich schnell zu drehen | Benötigt, aber nicht ausreichend |
| Motordrehmoment | Hilft der Kamera, Lasten zu widerstehen | Sehr wichtig |
| KI-Latenz | Beeinflusst, wie schnell die Nachführung reagiert | Muss niedrig bleiben |
| Zoomstufe | Ändert den Nachführwinkel | Höherer Zoom erfordert mehr Sorgfalt |
| Zielentfernung | Ändert die geforderte Winkelgeschwindigkeit | Nahe Ziele sind schwieriger |
Ich erkläre das David Miller normalerweise auf einfache Weise. Wenn er einen Läufer in 15 Metern Entfernung beobachtet, muss sich die Kamera viel schneller bewegen, als wenn er denselben Läufer in 80 Metern Entfernung beobachtet. Die Zielgeschwindigkeit in der realen Welt bleibt gleich, aber der Kamerawinkel ändert sich im Nahbereich stärker. Deshalb kümmere ich mich sowohl um die mechanische als auch um die Softwareseite. Ich kümmere mich auch um die Stabilität des Videostreams, denn ein schnelles, aber wackeliges Bild ist immer noch ein schlechtes Bild. Meiner Meinung nach ist die beste PTZ nicht diejenige, die sich nur schnell dreht. Es ist diejenige, die sich schnell dreht, ruhig bleibt und das Ziel im Bild behält.
Verliert die Kamera die Spur, wenn ein Fahrzeug auf dem Parkplatz schnell beschleunigt?
Ich kenne diese Angst gut. Ein Fahrzeug kann einen Moment lang ruhig aussehen und dann schnell beschleunigen. Wenn die Kamera zu spät reagiert, können das Kennzeichen, der Fahrer oder die Fahrzeugform aus dem Blickfeld geraten.
Eine gute PTZ sollte die Verfolgung nicht verlieren, nur weil ein Fahrzeug schnell beschleunigt. Sie sollte Bewegungsprädiktion3, Geschwindigkeitsaktualisierungen und Ziel-Wiedererfassungslogik4 verwenden, um die Änderung zu verfolgen, ohne die Verfolgung zu unterbrechen.
 KI-Fahrzeugverfolgung auf Parkplätzen
KI-Fahrzeugverfolgung auf Parkplätzen
Ich sage immer, dass plötzliches Beschleunigen nicht der Hauptfeind ist. Verzögerung ist der Hauptfeind. Wenn ein Fahrzeug auf einem Parkplatz schnell die Geschwindigkeit ändert, muss die KI diese neue Bewegung sofort erkennen. Dann muss die Steuerung den Motor antreiben, um aufzuholen. Wenn das System erst reagiert, nachdem das Fahrzeug bereits weit weggefahren ist, wird die Spur abdriften. Wenn das System die nächste Position vorhersagt, kann die Kamera auf dem Ziel bleiben.
Was passiert, wenn ein Fahrzeug beschleunigt
Ich teile das in drei Schritte auf.
| Schritt | Was die Kamera sieht | Was das System tun sollte |
|---|---|---|
| 1 | Fahrzeug bewegt sich langsam | Halten Sie das Ziel zentriert |
| 2 | Fahrzeug beginnt zu beschleunigen | Erhöhen Sie die Tracking-Reaktion |
| 3 | Fahrzeug dreht oder fährt schnell davon | Vorhersage der nächsten Position und Verfolgung |
Ich habe festgestellt, dass Parkplätze eine gute Testumgebung sind. Autos halten oft an, fahren an, drehen und fahren rückwärts. Das bedeutet, dass die KI mehr als nur eine einfache geradlinige Bewegung verstehen muss. Sie muss ein echtes Ziel von einem Hintergrundobjekt trennen. Sie muss auch vermeiden, Schatten oder ein anderes sich bewegendes Auto zu verfolgen. Hier hilft ein starkes Tracking-Modell. Ich möchte, dass das System den Lock beibehält, auch wenn sich die Geschwindigkeit ändert. Wenn das Fahrzeug kurzzeitig einen Teil der Sicht blockiert, sollte die Kamera für kurze Zeit weiter seinen Weg erraten. Dieses kurze Gedächtnis ist in realen Projekten sehr nützlich.
Für David Miller ist das wichtig, denn ein verlorener Track kann zu einem echten Projektproblem führen. Es kann verpasste Beweise, schlechte Abdeckung oder eine schwache Demo während der Abnahmetests bedeuten. Ich möchte nicht, dass die Kamera in Panik gerät, wenn sich das Ziel schnell bewegt. Ich möchte, dass sie ruhig bleibt, den Winkel korrigiert und sich schnell erholt, wenn das Ziel für einen Moment verrutscht. Deshalb schätze ich gutes Beschleunigungsmanagement, schnelles Wiedererfassen und eine saubere Bewegungslogik.
Wie hilft die “Beschleunigungskurve” des Motors beim Einfangen eines sich schnell bewegenden Ziels?
Ich achte genau auf die Beschleunigungskurve5 , da sie steuert, wie sich die Kamera zu bewegen beginnt. Eine Kamera, die zu stark ruckt, kann wackeln. Eine Kamera, die zu sanft startet, kann zurückfallen.
Die Beschleunigungskurve hilft der PTZ, ein schnelles Ziel zu erfassen, indem sie steuert, wie schnell der Motor die Geschwindigkeit hochfährt. Sie reduziert Ruck6, schützt den Mechanismus und ermöglicht es der Kamera, die Tracking-Geschwindigkeit reibungslos und schnell zu erreichen.
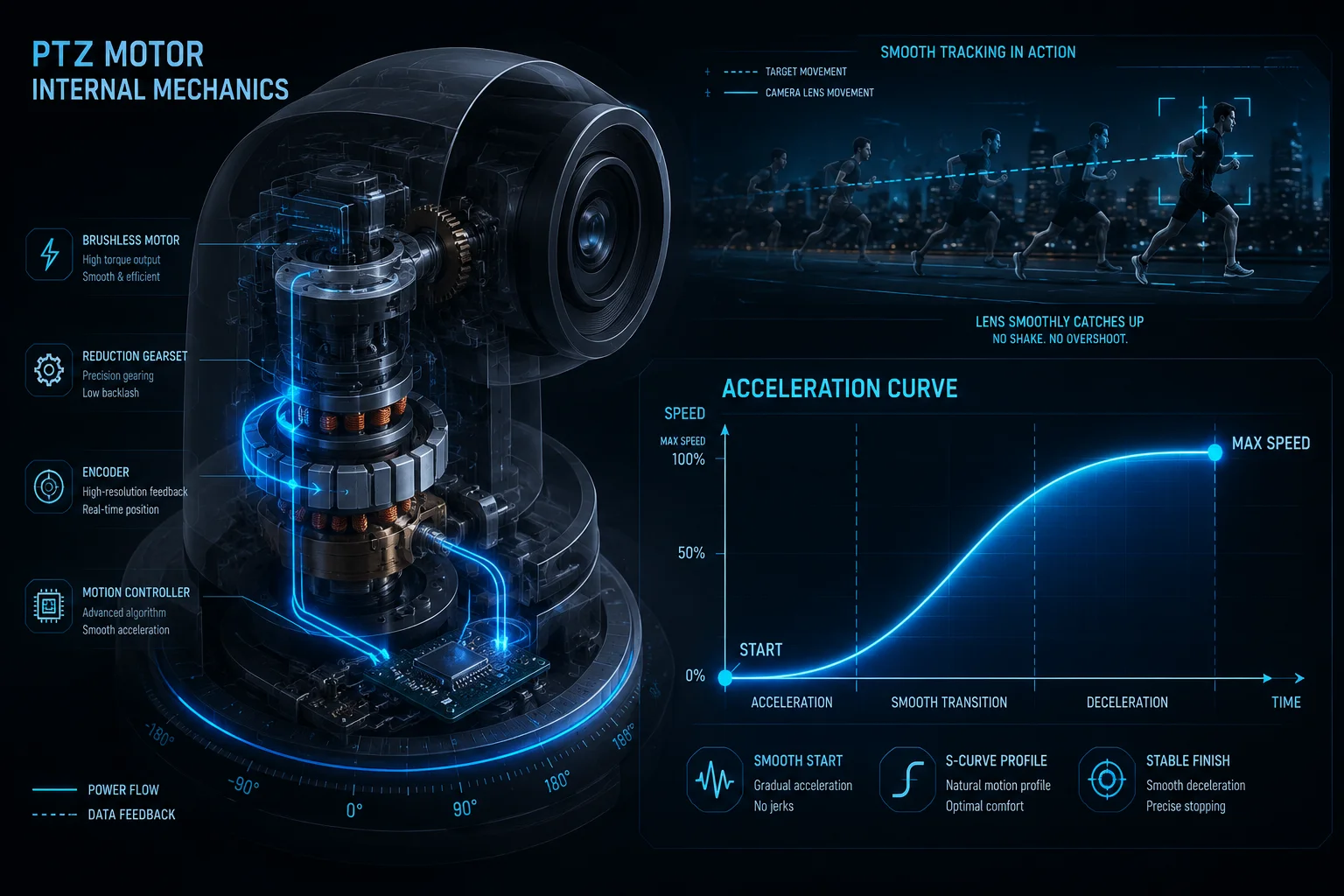 PTZ-Motor-Beschleunigungskurve
PTZ-Motor-Beschleunigungskurve
Ich erkläre die Beschleunigungskurve gerne als den “Laufstil” der Kamera. Manche Leute sprinten von Anfang an zu stark los und werden schnell müde. Manche Leute starten zu langsam und holen nie auf. Eine gute PTZ findet den Mittelweg. Sie beginnt mit einem kontrollierten Schub, baut dann schnell Geschwindigkeit auf und geht dann in eine sanfte Nachführung über. Das ist viel besser als ein harter Start.
Warum sanfte Beschleunigung wichtig ist
Wenn ich den Motor zu aggressiv einstelle, kann das Bild springen. Wenn ich ihn zu sanft einstelle, kann das Ziel entkommen, bevor die Kamera den richtigen Winkel erreicht. Daher möchte ich eine Kurve, die die Zielbewegung und die Objektivlast berücksichtigt. Dies ist umso wichtiger, wenn der Zoom hoch ist, da ein kleiner Winkel-Fehler zu einem großen Bild-Fehler wird.
| Beschleunigungsstil | Ergebnis | Meine Notiz |
|---|---|---|
| Zu langsam | Nachführungsverzögerung | Schlecht für Läufer |
| Zu scharf | Bildruckeln | Schlecht für die Verifizierung |
| Ausgewogene Kurve | Sanftes Aufholen | Am besten für den realen Einsatz |
Ich achte auch auf Drehmomentreserve7. Der Motor benötigt genügend Leistung, um die Objektivbaugruppe ohne Verzögerung zu bewegen. In einem realen Projekt können Wind, Kabelzug8, und kaltes Wetter die Bewegung erschweren. Eine gute Beschleunigungskurve gibt der Kamera eine bessere Chance, unter diesen realen Bedingungen auf dem Ziel zu bleiben. Ich sage Käufern oft, dass die Kurve nicht nur ein mechanisches Detail ist. Sie ist Teil des gesamten Nachführungserlebnisses. Wenn die Kurve stimmt, fühlt sich die Kamera intelligent an. Sie fühlt sich nicht gehetzt an. Sie fühlt sich nicht schwach an. Sie folgt einfach.
Wird die Tracking-Geschwindigkeit dynamisch angepasst, basierend auf der Entfernung des Ziels zur Linse?
Ich denke, das ist eine der wichtigsten Fragen für die reale Nachführarbeit. Eine Kamera sieht die Welt aus 10 Metern und 100 Metern Entfernung nicht auf die gleiche Weise.
Ja. Die Nachführgeschwindigkeit sollte dynamisch an die Entfernung angepasst werden. Nahe Ziele erfordern schnellere Winkeländerungen, während ferne Ziele kleinere, sanftere Korrekturen erfordern.
 Dynamische PTZ-Entfernungsanpassung für die Nachführung
Dynamische PTZ-Entfernungsanpassung für die Nachführung
Ich verwende die Entfernung als wichtigen Eingabewert, da sie die Aufgabe der Kamera verändert. Eine Person, die nahe am Objektiv rennt, verursacht eine enorme Bewegung im Bild. Die PTZ muss sich schnell drehen und verhindern, dass das Ziel den Rand verlässt. Ein fernes Ziel kann sich mit der gleichen realen Geschwindigkeit bewegen, aber die Bildverschiebung ist langsamer. In diesem Fall sollte die Kamera nicht überreagieren. Wenn sie überreagiert, kann das Bild nervös und instabil wirken.
Wie Entfernungsänderungen das Verhalten steuern
Ich denke normalerweise an drei Entfernungszonen.
| Entfernungszone | Nachführverhalten | Was ich erwarte |
|---|---|---|
| Nahe Reichweite | Schnelle Winkelkorrektur | Starke Reaktion erforderlich |
| Mittlere Reichweite | Ausgewogene Nachführung | Beste allgemeine Verwendung |
| Ferne Reichweite | Kleine, sanfte Änderungen | Stabilität ist wichtiger |
Hier macht intelligente Software einen großen Unterschied. Ein einfaches System verwendet möglicherweise eine feste Geschwindigkeit für alles. Das funktioniert oft schlecht. Es kann für einen nahen Läufer zu langsam und für ein fernes Fahrzeug zu schnell sein. Ein intelligenteres System passt die Regelverstärkung, die Motorgeschwindigkeit und manchmal sogar das Zoomverhalten an. Es kann auch die Zielgröße und die Zielbewegung nutzen, um das Ergebnis zu verbessern. Ich mag Systeme, die sich in verschiedenen Szenen unterschiedlich verhalten, da reale Szenen nie gleich sind.
Zum Beispiel kann auf einem Bauernhof ein Ziel die meiste Zeit weit entfernt sein. In einem Hof oder Parkplatz kann sich das Ziel sehr schnell der Kamera nähern. Dieselbe PTZ muss beides bewältigen. Deshalb bevorzuge ich eine dynamische Nachführlogik gegenüber einer festen Logik. Sie bietet eine bessere Bildqualität, eine bessere Zielerfassung und weniger nutzlose Bewegungen. Für Käufer wie David Miller bedeutet dies weniger Fehlalarme, weniger Besuche vor Ort und weniger Zeit für die manuelle Abstimmung des Systems.
Kann KI-Tracking sowohl Personen als auch Fahrzeuge im selben System verarbeiten?
Ich frage das, weil viele Projekte eine Kamera benötigen, die viele Aufgaben erfüllt. Ein Standort kann gleichzeitig Personen haben, die gehen, Autos, die einfahren, und Servicefahrzeuge, die abbiegen.
Ja. Eine starke KI-PTZ kann sowohl Menschen als auch Fahrzeuge handhaben, wenn sie unterschiedliche Erkennungsregeln, eine gute Tracking-Logik und eine ordnungsgemäße Szenenabstimmung verwendet.
Ich möchte keine Kamera, die eine Person wie einen LKW oder einen LKW wie eine Person behandelt. Die Bewegungsmuster sind unterschiedlich. Eine Person kann schnell anhalten, schnell die Richtung ändern und in kurzen Stößen laufen. Ein Fahrzeug hat normalerweise einen größeren Körper, einen anderen Geschwindigkeitsbereich und einen größeren Wendekreis. Die KI sollte das wissen. Sie sollte nicht auf jedes Ziel gleich reagieren.
Warum der Zieltyp wichtig ist
| Zieltyp | Bewegungsstil | Tracking-Bedarf |
|---|---|---|
| Person | Schnelle Änderungen, kleiner Körper | Schnelle Reaktion |
| Fahrzeug | Stabiler Körper, schnellere Bewegung | Sanftes Folgen |
| Gemischte Szene | Viele Objekte gleichzeitig | Starke Filterung |
Ich habe gesehen, wie sich Projekte stark verbessert haben, als das System separate Zielklassen verwendet hat. Die Kamera kann einer Person folgen, ohne zu einem nahegelegenen Auto zu springen. Sie kann auch ein Fahrzeug weiter verfolgen, auch wenn eine Person durch die Szene geht. Diese Art von Stabilität ist bei Sicherheitsaufgaben sehr wichtig. Sie reduziert Fehlalarme und hilft dem Bediener, dem System zu vertrauen.
Schlussfolgerung
Ich glaube, dass das beste PTZ-Tracking schnell, reibungslos und intelligent ist. Es hält mit Menschen und Fahrzeugen Schritt, da es Geschwindigkeit, Drehmoment, Vorhersage und abstandsbewusste Steuerung kombiniert.
1. Das Motordrehmoment bestimmt, wie gut eine PTZ-Kamera Lasten widerstehen und ihre Linsenbaugruppe schnell bewegen kann. ︎↩︎ 2. KI-Tracking verwendet Algorithmen, um sich bewegende Ziele automatisch zu verfolgen, was für PTZ-Kameras unerlässlich ist. ︎↩︎ 3. Bewegungsprädiktionsalgorithmen schätzen die nächste Position eines Ziels und helfen der PTZ, während der Beschleunigung auf dem Ziel zu bleiben. ︎↩︎ 4. Die Logik zur Wiedererfassung von Zielen ermöglicht es der Kamera, ein Ziel schnell wieder zu erfassen, wenn es kurzzeitig aus dem Bild verschwindet. ︎↩︎ 5. Die Beschleunigungskurve steuert, wie schnell der PTZ-Motor hochfährt, was die Glätte und Geschwindigkeit des Trackings beeinflusst. ︎↩︎ 6. Ruck ist die Änderungsrate der Beschleunigung; die Reduzierung des Rucks verhindert Bilderschütterungen beim Starten und Stoppen von PTZ-Kameras. ︎↩︎ 7. Das Drehmomentreserve stellt sicher, dass der Motor genügend Leistung hat, um Umgebungsbelastungen wie Wind oder Kabelwiderstand zu überwinden. ︎↩︎ 8. Kabelwiderstand erhöht den Widerstand der PTZ-Bewegung, insbesondere bei windigen Bedingungen, was die Nachführleistung beeinträchtigt. ︎↩︎