
J'ai vu de nombreux projets échouer parce que la caméra était trop lente à réagir. Je ne veux pas qu'une cible s'échappe simplement parce que la PTZ a hésité une seconde.
Oui. Une PTZ industrielle bien construite peut suivre une personne qui court vite à plus de 5 m/s et un véhicule lent. Elle y parvient grâce à une vitesse de moteur élevée, un couple puissant, une logique de prédiction et un contrôle de zoom intelligent.
![]() Vitesse de suivi PTZ et suivi IA
Vitesse de suivi PTZ et suivi IA
J'ai travaillé avec des acheteurs qui ne se soucient que d'une chose avant tout : un suivi stable en utilisation réelle. C'est pourquoi je me concentre sur ce que la caméra peut faire lorsqu'une personne court fort ou qu'un véhicule se déplace et change de vitesse.
Table des matières
Quel est le “Degrés par seconde” (DPS) maximum que la PTZ peut maintenir pendant le suivi IA ?
J'ai entendu cette question de nombreuses fois de la part des intégrateurs de systèmes. Une caméra peut avoir l'air bien sur une fiche technique, mais j'ai besoin de savoir si elle peut réellement tourner assez vite lorsque la cible bouge.
Pendant le suivi IA, une PTZ industrielle robuste peut généralement maintenir environ 240°/s à 300°/s en mouvement prédéfini, tandis que la vitesse de suivi en utilisation IA réelle dépend de la charge, du niveau de zoom, de l'angle de la cible et de la logique de contrôle.
 Degrés par seconde de la PTZ pendant le suivi IA
Degrés par seconde de la PTZ pendant le suivi IA
Je ne juge pas le suivi sur un seul chiffre de vitesse. J'examine toute la chaîne. La vitesse du moteur est importante, mais le couple moteur1 l'est aussi. Le délai de contrôle est important. Le niveau de zoom de l'objectif est important. Même la distance à la cible modifie la vitesse à laquelle la caméra doit tourner pour maintenir la cible centrée. Une personne qui court près de la caméra crée un changement d'angle beaucoup plus rapide qu'une personne éloignée. Un véhicule lent dans un parking est plus facile, mais il nécessite toujours un mouvement fluide et stable, pas un balancement brusque et disgracieux.
Pourquoi le DPS n'est pas toute l'histoire
Je pense que de nombreux acheteurs font la même erreur. Ils demandent un grand nombre, mais ils ne demandent pas comment ce nombre a été testé. Une PTZ peut atteindre une vitesse prédéfinie élevée lorsqu'elle se déplace du point A au point B. Mais le suivi par IA2 est différent. La caméra doit bouger, s'arrêter, ajuster et corriger en même temps. Cela nécessite un bon contrôleur et un moteur stable.
| Facteur | Pourquoi c'est important | Mon point de vue |
|---|---|---|
| Vitesse du moteur | Aide la caméra à tourner rapidement | Nécessaire, mais pas suffisant |
| Couple moteur | Aide la caméra à résister à la charge | Très important |
| Latence de l'IA | Affecte la rapidité de réaction du suivi | Doit rester bas |
| Niveau de zoom | Modifie l'angle de suivi | Un zoom plus élevé nécessite plus de soin |
| Distance de la cible | Modifie la demande de vitesse angulaire | Les cibles proches sont plus difficiles |
J'explique généralement cela à David Miller de manière simple. S'il regarde un coureur à 15 mètres, la caméra doit bouger beaucoup plus vite que s'il regarde le même coureur à 80 mètres. La vitesse de la cible dans le monde réel reste la même, mais l'angle de la caméra change davantage à courte distance. C'est pourquoi je me soucie à la fois de l'aspect mécanique et de l'aspect logiciel. Je me soucie également de la stabilité du flux vidéo, car une image rapide mais tremblante reste une mauvaise image. À mon avis, la meilleure PTZ n'est pas celle qui tourne seulement vite. C'est celle qui tourne vite, reste fluide et garde la cible dans le cadre.
La caméra perdra-t-elle la cible si un véhicule accélère rapidement dans le parking ?
Je connais bien cette peur. Un véhicule peut sembler calme un instant, puis accélérer rapidement. Si la caméra réagit trop tard, la plaque, le conducteur ou la forme du véhicule peuvent sortir du champ de vision.
Une bonne PTZ ne devrait pas perdre la cible simplement parce qu'un véhicule accélère rapidement. Elle devrait utiliser la prédiction de mouvement3, les mises à jour de vitesse et la logique de réacquisition de cible4 pour suivre le changement sans interrompre le suivi.
 Suivi de véhicule par IA dans un parking
Suivi de véhicule par IA dans un parking
Je dis toujours que l'accélération soudaine n'est pas le principal ennemi. Le retard est le principal ennemi. Lorsqu'un véhicule change rapidement de vitesse dans un parking, l'IA doit détecter ce nouveau mouvement immédiatement. Ensuite, le contrôleur doit pousser le moteur pour rattraper. Si le système ne réagit qu'après que le véhicule se soit déjà éloigné, la trace dérivera. Si le système prédit la prochaine position, la caméra peut rester sur la cible.
Ce qui se passe quand un véhicule accélère
Je divise cela en trois étapes.
| Étape | Ce que la caméra voit | Ce que le système doit faire |
|---|---|---|
| 1 | Le véhicule se déplace lentement | Garder la cible centrée |
| 2 | Le véhicule commence à accélérer | Augmenter la réponse de suivi |
| 3 | Le véhicule tourne ou s'éloigne rapidement | Prédire la prochaine position et suivre |
J'ai constaté que les parkings sont une bonne scène de test. Les voitures s'arrêtent, démarrent, tournent et reculent souvent. Cela signifie que l'IA doit comprendre plus qu'un simple mouvement rectiligne. Elle doit séparer une cible réelle d'un objet d'arrière-plan. Elle doit également éviter de poursuivre des ombres ou une autre voiture en mouvement. C'est là qu'un modèle de suivi solide aide. Je veux que le système maintienne le verrouillage même lorsque la vitesse change. Si le véhicule bloque brièvement une partie de la vue, la caméra doit continuer à deviner sa trajectoire pendant un court instant. Cette courte mémoire est très utile dans les projets réels.
Pour David Miller, cela est important car une perte de suivi peut causer un problème réel dans un projet. Cela peut signifier des preuves manquées, une mauvaise couverture ou une démo faible lors des tests d'acceptation. Je ne veux pas que la caméra panique lorsque la cible se déplace rapidement. Je veux qu'elle reste calme, corrige l'angle et récupère rapidement si la cible glisse un instant. C'est pourquoi j'apprécie une bonne gestion de l'accélération, un ré-verrouillage rapide et une logique de mouvement propre.
Comment la “Courbe d'accélération” du moteur aide-t-elle à rattraper une cible en mouvement rapide ?
Je porte une attention particulière à la courbe d'accélération5 car elle contrôle le démarrage du mouvement de la caméra. Une caméra qui démarre trop brusquement peut trembler. Une caméra qui démarre trop doucement peut prendre du retard.
La courbe d'accélération aide le PTZ à capturer une cible rapide en contrôlant la vitesse à laquelle le moteur monte en régime. Elle réduit les à-coups6, protège le mécanisme et permet à la caméra d'atteindre la vitesse de suivi en douceur et rapidement.
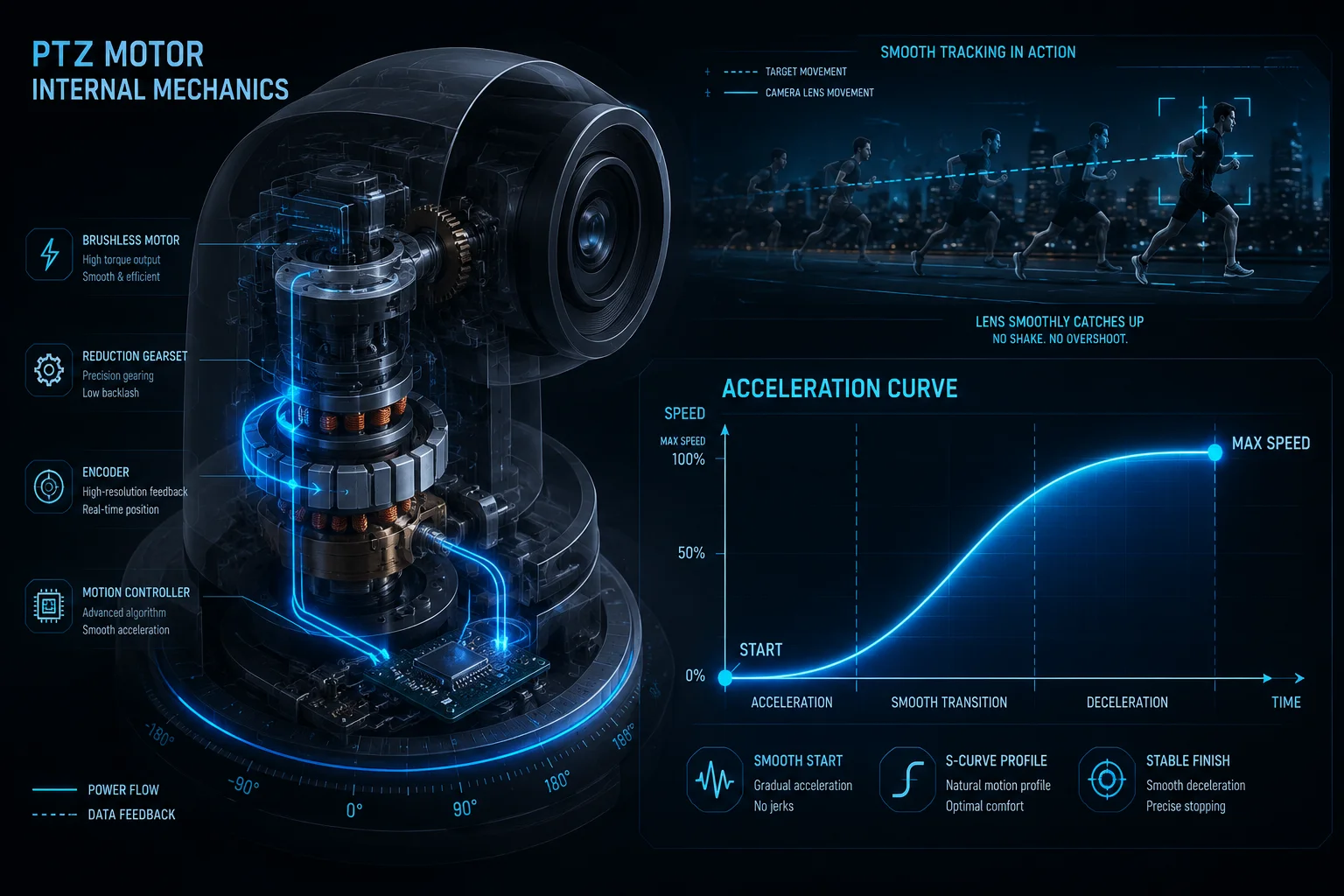 Courbe d'accélération du moteur PTZ
Courbe d'accélération du moteur PTZ
J'aime expliquer la courbe d'accélération comme le “ style de course ” de la caméra. Certaines personnes sprintent trop fort dès le départ et se fatiguent vite. D'autres commencent trop lentement et ne rattrapent jamais. Une bonne PTZ trouve le juste milieu. Elle commence par une poussée contrôlée, puis prend de la vitesse rapidement, et enfin s'installe dans un suivi fluide. C'est bien mieux qu'un démarrage brutal.
Pourquoi l'accélération fluide est importante
Si je rends le moteur trop agressif, l'image peut sauter. Si je le rends trop doux, la cible peut s'échapper avant que la caméra n'atteigne le bon angle. Je veux donc une courbe qui corresponde au mouvement de la cible et à la charge de l'objectif. C'est encore plus important lorsque le zoom est élevé, car une petite erreur d'angle devient une grosse erreur d'image.
| Style d'accélération | Résultat | Ma note |
|---|---|---|
| Trop lent | Retard de suivi | Mauvais pour les coureurs |
| Trop net | Tremblement de l'image | Mauvais pour la vérification |
| Courbe équilibrée | Rattrapage fluide | Idéal pour une utilisation réelle |
Je me soucie aussi de réserve de couple7. Le moteur a besoin de suffisamment de puissance pour déplacer l'ensemble de l'objectif sans délai. Dans un projet réel, le vent, traînée du câble8, et le froid peuvent tous rendre le mouvement plus difficile. Une bonne courbe d'accélération donne à la caméra une meilleure chance de rester sur la cible dans ces conditions réelles. Je dis souvent aux acheteurs que la courbe n'est pas seulement un détail mécanique. Elle fait partie de l'expérience de suivi complète. Lorsque la courbe est correcte, la caméra semble intelligente. Elle ne semble pas pressée. Elle ne semble pas faible. Elle suit simplement.
La vitesse de suivi est-elle ajustée dynamiquement en fonction de la distance de la cible par rapport à l'objectif ?
Je pense que c'est l'une des questions les plus importantes pour un travail de suivi réel. Une caméra ne voit pas le monde de la même manière à 10 mètres et à 100 mètres.
Oui. La vitesse de suivi doit être ajustée dynamiquement en fonction de la distance. Les cibles proches nécessitent des changements d'angle plus rapides, tandis que les cibles éloignées nécessitent des corrections plus petites et plus douces.
 Réglage dynamique de la distance de suivi PTZ
Réglage dynamique de la distance de suivi PTZ
J'utilise la distance comme une entrée clé car elle change le travail de la caméra. Une personne courant près de l'objectif crée un mouvement énorme dans le cadre. Le PTZ doit tourner rapidement et empêcher la cible de quitter le bord. Une cible éloignée peut se déplacer à la même vitesse réelle, mais le décalage du cadre est plus lent. Dans ce cas, la caméra ne doit pas réagir de manière excessive. Si elle réagit de manière excessive, l'image peut sembler nerveuse et instable.
Comment la distance modifie le contrôle
Je pense généralement à trois zones de distance.
| Zone de distance | Comportement de suivi | Ce que j'attends |
|---|---|---|
| Portée proche | Correction d'angle rapide | Forte réponse nécessaire |
| Portée moyenne | Suivi équilibré | Meilleure utilisation générale |
| Portée éloignée | Petits changements doux | La stabilité est plus importante |
C'est là que le logiciel intelligent fait une grande différence. Un système simple peut utiliser une vitesse fixe pour tout. Cela fonctionne souvent mal. Il peut être trop lent pour un coureur proche et trop rapide pour un véhicule éloigné. Un système plus intelligent ajuste le gain de contrôle, la vitesse du moteur et parfois même le comportement du zoom. Il peut également utiliser la taille de la cible et le mouvement de la cible pour améliorer le résultat. J'aime les systèmes qui se comportent différemment dans différentes scènes, car les scènes réelles ne sont jamais les mêmes.
Par exemple, dans une ferme, une cible peut être éloignée la plupart du temps. Dans une cour ou un parking, la cible peut se déplacer très rapidement près de la caméra. Le même PTZ doit gérer les deux. C'est pourquoi je préfère la logique de suivi dynamique à la logique fixe. Elle offre une meilleure qualité d'image, un meilleur verrouillage de la cible et moins de mouvements inutiles. Pour les acheteurs comme David Miller, cela signifie moins de fausses alarmes, moins de visites sur site et moins de temps passé à régler le système manuellement.
Le suivi IA peut-il gérer à la fois les personnes et les véhicules dans le même système ?
Je pose cette question car de nombreux projets nécessitent qu'une seule caméra effectue de nombreuses tâches. Un site peut avoir des personnes qui marchent, des voitures qui entrent et des véhicules de service qui tournent en même temps.
Oui. Une PTZ IA performante peut gérer à la fois les personnes et les véhicules si elle utilise différentes règles de détection, une bonne logique de suivi et un réglage de scène approprié.
Je ne veux pas d'une caméra qui traite une personne comme un camion ou un camion comme une personne. Les modèles de mouvement sont différents. Une personne peut s'arrêter rapidement, changer de direction rapidement et courir par courtes rafales. Un véhicule a généralement un corps plus grand, une plage de vitesse différente et un rayon de braquage plus large. L'IA devrait le savoir. Elle ne devrait pas utiliser la même réponse pour chaque cible.
Pourquoi le type de cible est important
| Type de cible | Style de mouvement | Besoin de suivi |
|---|---|---|
| Personne | Changements rapides, petit corps | Réponse rapide |
| Véhicule | Corps stable, mouvement plus rapide | Suivi fluide |
| Scène mixte | Beaucoup d'objets à la fois | Filtrage puissant |
J'ai vu des projets s'améliorer considérablement lorsque le système utilise des classes de cibles distinctes. La caméra peut suivre une personne sans passer à une voiture proche. Elle peut également continuer à suivre un véhicule même si une personne traverse la scène. Ce type de stabilité est très important dans les métiers de la sécurité. Il réduit les fausses alarmes et aide l'opérateur à faire confiance au système.
Conclusion
Je crois que le meilleur suivi PTZ est rapide, fluide et intelligent. Il suit les personnes et les véhicules car il utilise ensemble la vitesse, le couple, la prédiction et le contrôle conscient de la distance.
1. Le couple moteur détermine la capacité d'une PTZ à résister à la charge et à déplacer rapidement son ensemble d'objectifs. ︎↩︎ 2. Le suivi IA utilise des algorithmes pour suivre automatiquement les cibles en mouvement, ce qui est essentiel pour les caméras PTZ. ︎↩︎ 3. Les algorithmes de prédiction de mouvement estiment la prochaine position d'une cible, aidant la PTZ à rester verrouillée pendant l'accélération. ︎↩︎ 4. La logique de réacquisition de cible permet à la caméra de réacquérir rapidement une cible si elle quitte brièvement le cadre. ︎↩︎ 5. La courbe d'accélération contrôle la rapidité avec laquelle le moteur PTZ monte en régime, affectant la fluidité et la vitesse du suivi. ︎↩︎ 6. Le jerk est le taux de variation de l'accélération ; réduire le jerk empêche le tremblement de l'image lors des démarrages et arrêts de la PTZ. ︎↩︎ 7. La réserve de couple garantit que le moteur a suffisamment de puissance pour surmonter les charges environnementales telles que le vent ou la traînée du câble. ︎↩︎ 8. La traînée du câble ajoute une résistance au mouvement de la PTZ, en particulier par temps venteux, affectant les performances de suivi. ︎↩︎