
I have seen too many high-end PTZ projects fail — not because of the sensor or the lens, but because of the motor hiding inside the housing.
Ultrasonic motors (USM) outperform stepping motors in high-end PTZ projects because they deliver instant torque at low speed, near-silent operation, superior positioning accuracy with zero gear backlash, and reliable self-locking when power is cut — all critical traits that stepping motors cannot match without complex add-ons.
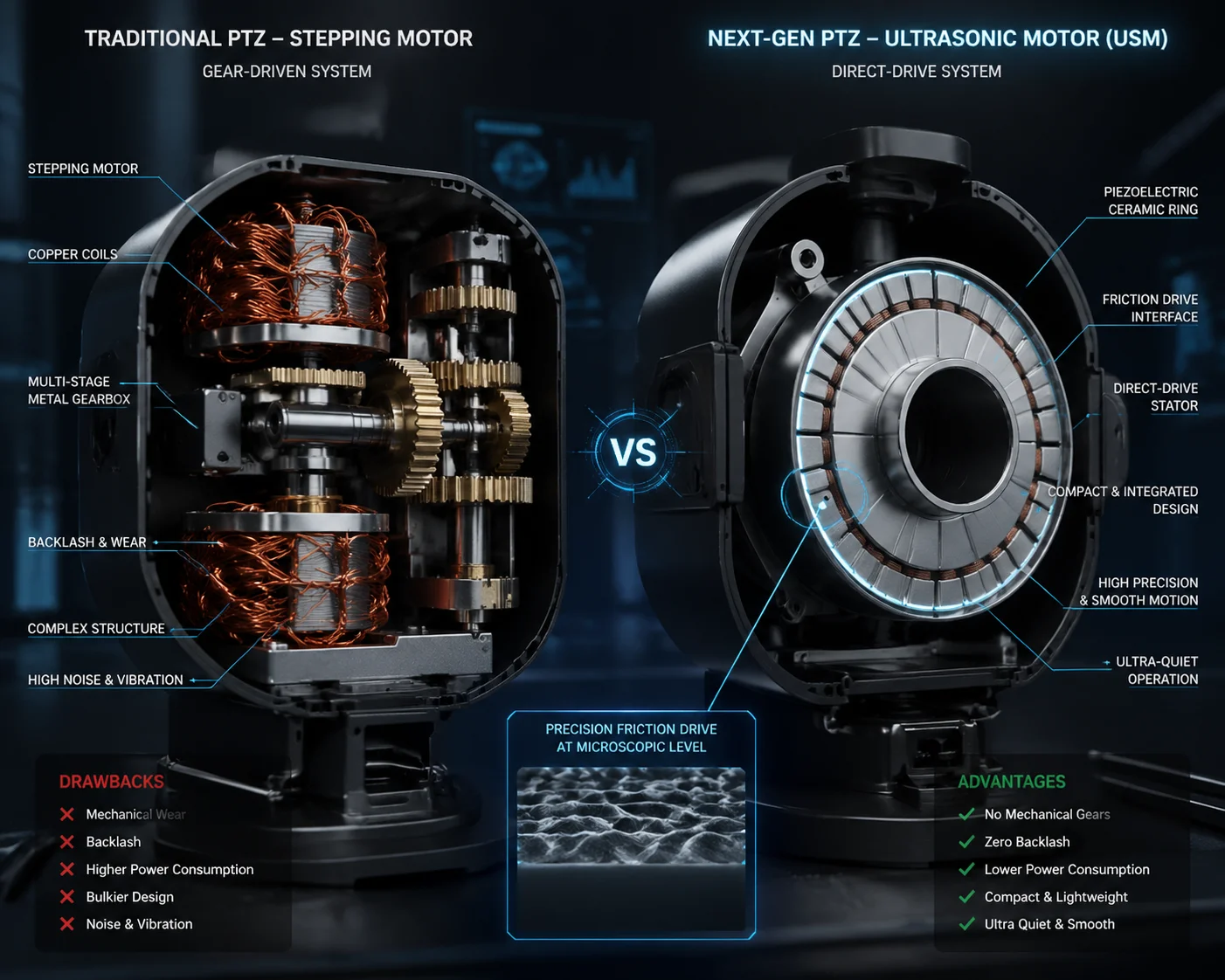 Ultrasonic motor vs stepping motor PTZ camera comparison
Ultrasonic motor vs stepping motor PTZ camera comparison
Below, I break down four key dimensions where USM gives you a real, measurable edge. If you are specifying motors for a border surveillance system, a broadcast PTZ, or any project where failure is not an option, keep reading.
Table of Contents
Does a USM Drive Provide Faster and Quieter Panning for Discreet Surveillance?
I once lost a government tender because the client heard the PTZ motor buzzing during a live demo. That day taught me a hard lesson about motor noise.
Yes. A USM drive pans faster and quieter because it operates at ultrasonic frequencies above 20 kHz — completely outside human hearing range — and it reaches full speed almost instantly, with no ramp-up delay that stepping motors need.
 USM silent panning for discreet PTZ surveillance camera
USM silent panning for discreet PTZ surveillance camera
Why Stepping Motors Make Noise
A stepping motor works by sending electrical pulses to electromagnetic coils. Each pulse moves the rotor by a fixed angle — typically 1.8 degrees. This “step-by-step” motion creates two types of noise:
- Electromagnetic pulse noise: The coils vibrate at audible frequencies. You hear a characteristic “whine” or “buzz.”
- Gear mesh noise: Because stepping motors often need a gearbox to increase torque, the gear teeth clicking against each other add more sound.
In a quiet hotel lobby, a museum hall, or a courtroom, this noise is unacceptable. Even in outdoor settings, if your PTZ has a built-in microphone for audio recording, the motor noise bleeds into the audio track.
How USM Eliminates the Problem
An ultrasonic motor 1 uses a piezoelectric ceramic element that vibrates at frequencies above 20 kHz. This vibration creates a traveling wave on a metal stator. The rotor presses against the stator and moves through friction.
Because the driving frequency is ultrasonic, you simply cannot hear it. There are no gears to mesh. There is no electromagnetic hum. The result is a PTZ camera that moves in complete silence.
Speed Comparison: Ramp-Up vs. Instant
Stepping motors need time to accelerate. They start slow, speed up, then slow down again before stopping. This is called a trapezoidal speed profile. During this ramp-up phase, you lose precious milliseconds.
USM motors reach peak speed almost instantly. They also stop instantly. There is no coasting, no overshoot. For a surveillance operator tracking a suspect across a parking lot, this means the camera keeps up with the target — frame by frame, without blur.
| Performance Metric | Stepping Motor | Ultrasonic Motor (USM) |
|---|---|---|
| Start-up time | Requires acceleration ramp | Near-instant |
| Noise level | Audible buzz + gear noise | Silent (>20 kHz) |
| Gear requirement | Usually needs gearbox | Direct drive, no gears |
| Overshoot at stop | Common without tuning | Virtually zero |
Real-World Impact
Think about a casino floor. Dozens of PTZ cameras track players and dealers. If every camera buzzes each time it moves, the environment feels intrusive. With USM, the cameras move like ghosts — fast, silent, invisible. That is the standard high-end projects demand.
How Does the Torque of an Ultrasonic Motor Improve the Response Time for AI Tracking?
I have tested AI auto-tracking modules paired with both motor types. The difference in reaction time is not subtle — it is obvious on the first test.
USM produces high torque at low speed without a gearbox, so the motor responds to AI tracking commands with almost zero mechanical delay. This means the PTZ can change direction and accelerate instantly, keeping fast-moving targets centered in the frame.
 Ultrasonic motor high torque AI tracking PTZ camera
Ultrasonic motor high torque AI tracking PTZ camera
The Torque Problem with Stepping Motors
AI tracking works like this: the algorithm detects a person or vehicle, calculates the direction and speed, then sends movement commands to the motor. This happens many times per second.
A stepping motor has a torque curve that drops as speed increases. At very low speeds, it has decent torque. But when the AI needs a sudden burst of speed — say, a car enters the frame at 60 km/h — the motor struggles. It needs a gearbox to multiply torque, and that gearbox introduces:
- Backlash: The tiny gap between gear teeth causes a small delay every time the motor reverses direction.
- Inertia: The gears add rotational mass. More mass means slower acceleration.
- Lag: By the time the motor reaches the needed speed, the target may have already left the frame.
Why USM Solves This
An ultrasonic motor generates its highest torque at low speed — exactly where PTZ cameras spend most of their time. It does not need a gearbox. The rotor connects directly to the load. This means:
- Zero backlash. When the AI says “go left,” the camera goes left immediately. No lost motion.
- Low inertia. Without heavy gears, the moving parts are lighter. Lighter parts accelerate faster.
- Instant direction change. The friction-based drive can reverse without the “dead zone” that gears create.
What This Means for Your Project
If you are building a perimeter defense system with radar-linked PTZ cameras, the radar sends coordinates to the camera. The camera must slew to that exact angle in milliseconds. With a stepping motor and gearbox, you might see a 50–100 ms delay from backlash and inertia alone. With USM, that delay drops to near zero.
For AI-powered PTZ cameras tracking drones — which can change direction in a split second — this response time difference is the line between a usable system and a useless one.
Driving Heavy, High-Quality Glass
High-end PTZ cameras often use large, heavy lens groups. A 40X optical zoom lens with glass elements designed for a 1/1.2″ sensor is significantly heavier than a budget lens. Stepping motors may stall or slow down under this load. USM handles it with ease because high torque at low speed is its natural operating range. No strain. No stalling. No compromise on image quality.
Is the Positioning Accuracy of a USM Camera Superior for Long-Range Preset Calling?
I have had clients call me, frustrated, because their PTZ cameras “drifted” after a few months. The preset positions shifted by just a fraction of a degree — but at 40X zoom, that fraction meant the target was completely out of frame.
Yes. USM cameras offer superior positioning accuracy because they use direct friction drive with no gear backlash, achieving repeatable precision that stepping motors with gearboxes simply cannot match — especially critical when calling presets at high zoom levels.
 USM PTZ camera preset positioning accuracy long range
USM PTZ camera preset positioning accuracy long range
Why Preset Accuracy Matters More Than You Think
A typical high-end PTZ project might have 200 or more preset positions. Each preset stores a specific pan angle, tilt angle, and zoom level. The camera cycles through these presets hundreds of times per day in patrol mode.
Every time the camera returns to a preset, it must land on the exact same position. If it is off by even 0.01 degrees, here is what happens at different zoom levels:
| Zoom Level | 0.01° Error at Target Distance | Visible Shift on Screen |
|---|---|---|
| 10X zoom | ~0.17 m at 1 km | Minor, often acceptable |
| 30X zoom | ~0.17 m at 1 km | Noticeable, target partially out of frame |
| 40X zoom | ~0.17 m at 1 km | Severe, target may be completely lost |
At 40X zoom, the field of view is so narrow that even tiny positioning errors become critical. The camera might show a wall instead of a gate. A license plate instead of a face. Or nothing useful at all.
How Gear Backlash Destroys Accuracy
Stepping motors rely on gear trains to convert their high-speed, low-torque output into the low-speed, high-torque motion that PTZ cameras need. Every gear pair has a small gap — called backlash 2. This gap means that when the motor reverses direction, the output shaft does not move immediately. It waits until the gear teeth re-engage.
This backlash is typically 0.1° to 0.5° in consumer-grade gearboxes. Even precision gearboxes have some backlash. Over time, as gears wear, the backlash increases. Your preset accuracy degrades month by month.
USM: Direct Drive, Zero Backlash
An ultrasonic motor drives the load through direct friction contact. There are no gears between the motor and the camera’s rotation axis. This means:
- Zero backlash. The motor moves, the camera moves. No gap. No delay.
- High repeatability. USM platforms in laboratory settings achieve nanometer-level repeat accuracy. In a PTZ camera, this translates to sub-arc-second repeatability — far beyond what any geared stepping motor can achieve.
- No degradation over time. Because there are no gear teeth to wear down, the positioning accuracy stays consistent throughout the motor’s lifespan.
Full-Time Manual Override (FTM)
High-end USM designs also support full-time manual focus override. This means an operator can manually adjust the camera’s position or focus at any time — even while the auto-tracking system is running — without damaging the motor. With a geared stepping motor, forcing the shaft against the gear train can strip teeth or damage the encoder. USM’s friction-based drive simply slips under manual force, protecting both the motor and the operator’s adjustment.
This is especially useful when AI tracking makes an error. The operator grabs control, makes a fine adjustment, and the system continues. No reboot. No recalibration. No downtime.
Will a USM-Driven PTZ Have a Longer Mechanical Lifespan in 24/7 Patrol Modes?
I have replaced hundreds of stepping motors in PTZ cameras over the years. The gears wear out. The bearings get noisy. The whole assembly starts to feel “loose.” In 24/7 patrol mode, this happens faster than most people expect.
Yes. USM-driven PTZ cameras last significantly longer in 24/7 patrol because they have fewer mechanical wear points — no gears, no brushes, no commutators — and their friction-based self-locking feature reduces stress on the drive system when the camera holds a position.
 USM PTZ camera long lifespan 24/7 patrol mode
USM PTZ camera long lifespan 24/7 patrol mode
The Wear Problem in 24/7 Operation
A PTZ camera in patrol mode might complete a full 360° pan cycle every 60 seconds. That is 1,440 cycles per day. Over a year, that is 525,600 cycles. Over a typical 5-year project lifespan, that is over 2.6 million cycles.
For a stepping motor with a gearbox, each cycle means:
- Thousands of gear tooth engagements
- Repeated acceleration and deceleration stress on bearings
- Electrical pulse heating in the coils
- Vibration-induced loosening of mechanical fasteners
After 1–2 years of continuous patrol, I have seen gearboxes develop audible rattling. The backlash increases. The preset accuracy drops. The customer calls for a replacement. And if the camera is mounted on a 15-meter pole in a remote area, the cost of sending a technician with a boom lift far exceeds the cost of the camera itself.
How USM Reduces Wear
An ultrasonic motor has a fundamentally simpler mechanical structure:
- No gears. The biggest source of wear is eliminated entirely.
- No brushes or commutators. Unlike DC motors, there are no sliding electrical contacts to erode.
- Friction interface is engineered. The contact surface between the stator and rotor is made from specially designed materials (often alumina or other ceramics) that resist wear over millions of cycles.
The result is a motor that maintains its performance characteristics — torque, speed, accuracy, noise level — far longer than a geared stepping motor.
Self-Locking: Protecting the System at Rest
Here is a detail that many engineers overlook: in patrol mode, the camera spends a significant amount of time holding a position — dwelling at a preset for 5, 10, or 30 seconds before moving to the next one.
During this dwell time, a stepping motor must keep its coils energized to hold position. This consumes power and generates heat. Over time, this constant heating degrades the coil insulation and shortens motor life.
A USM motor, by contrast, has natural self-locking through friction. When you cut power, the rotor stays exactly where it is. No current needed. No heat generated. The motor rests completely during dwell time, extending its lifespan.
Wind Load and Vibration Resistance
For outdoor installations — highway poles, coastal towers, border posts — wind is a constant enemy. A strong gust can push against the camera housing and try to rotate it.
With a geared stepping motor, wind force pushes against the gear train. The backlash allows a tiny movement. Over millions of wind-induced micro-movements, the gears wear unevenly. This is called “fretting wear,” and it is a silent killer of outdoor PTZ cameras.
With USM, the friction self-lock holds the camera firmly in place. Wind pushes, but nothing moves. No fretting. No wear. No drift.
| Lifespan Factor | Stepping Motor + Gearbox | Ultrasonic Motor (USM) |
|---|---|---|
| Gear wear | Primary failure mode | No gears — not applicable |
| Power during dwell | Coils energized, generates heat | Zero power, friction self-lock |
| Wind resistance | Backlash allows micro-movement | Friction lock holds firm |
| Typical maintenance interval | 1–2 years in 24/7 mode | 3–5+ years in 24/7 mode |
| Replacement cost impact | High (especially remote sites) | Low (longer intervals) |
Conclusion
For high-end PTZ projects where speed, silence, accuracy, and lifespan truly matter, USM is not a luxury — it is the right engineering choice.
1. Ultrasonic motor operating principles and piezoelectric drive. ↩︎ 2. Gear backlash effect on positioning accuracy in PTZ systems. ↩︎ 3. Piezoelectric ceramic vibration modes for ultrasonic motors. ↩︎ 4. Trapezoidal speed profile vs instant start for PTZ motors. ↩︎ 5. AI auto-tracking latency from motor response time. ↩︎ 6. Radar-to-PTZ slewing latency comparison USM vs stepper. ↩︎ 7. Sub-arc-second repeatability in PTZ positioning systems. ↩︎ 8. Full-time manual override mechanism in ultrasonic motors. ↩︎ 9. Fretting wear in gearboxes under wind-induced vibration. ↩︎ 10. Ceramic friction interface durability in USM applications. ↩︎