
Vejo frequentemente equipes forçando demais os sistemas PTZ, e então elas perdem o melhor disparo ou sobrecarregam a fila. Eu me concentro no equilíbrio, porque um bom rastreamento depende tanto da velocidade da IA quanto do controle PTZ.
O sistema geralmente pode detectar de 30 a 60 alvos em um único quadro e manter de 8 a 16 alvos em uma fila de instantâneos para execução PTZ. O número exato depende da potência do SoC1, densidade da cena e das regras de agendamento PTZ que você define.
 Fila de instantâneos PTZ e rastreamento de alvos
Fila de instantâneos PTZ e rastreamento de alvos
Eu uso esse tipo de design quando preciso de uma visão ampla e de tomadas de detalhes rápidas. Se você quiser saber como a fila funciona em tempo real, eu a detalho abaixo.
Índice
O sistema pode rastrear os “Top 5” alvos mais suspeitos, mantendo uma visão panorâmica?
Eu conheço bem esse problema, porque uma cena ampla muitas vezes esconde o alvo mais importante bem à vista. Quero manter a visão completa, mas também preciso ficar no alvo de maior risco.
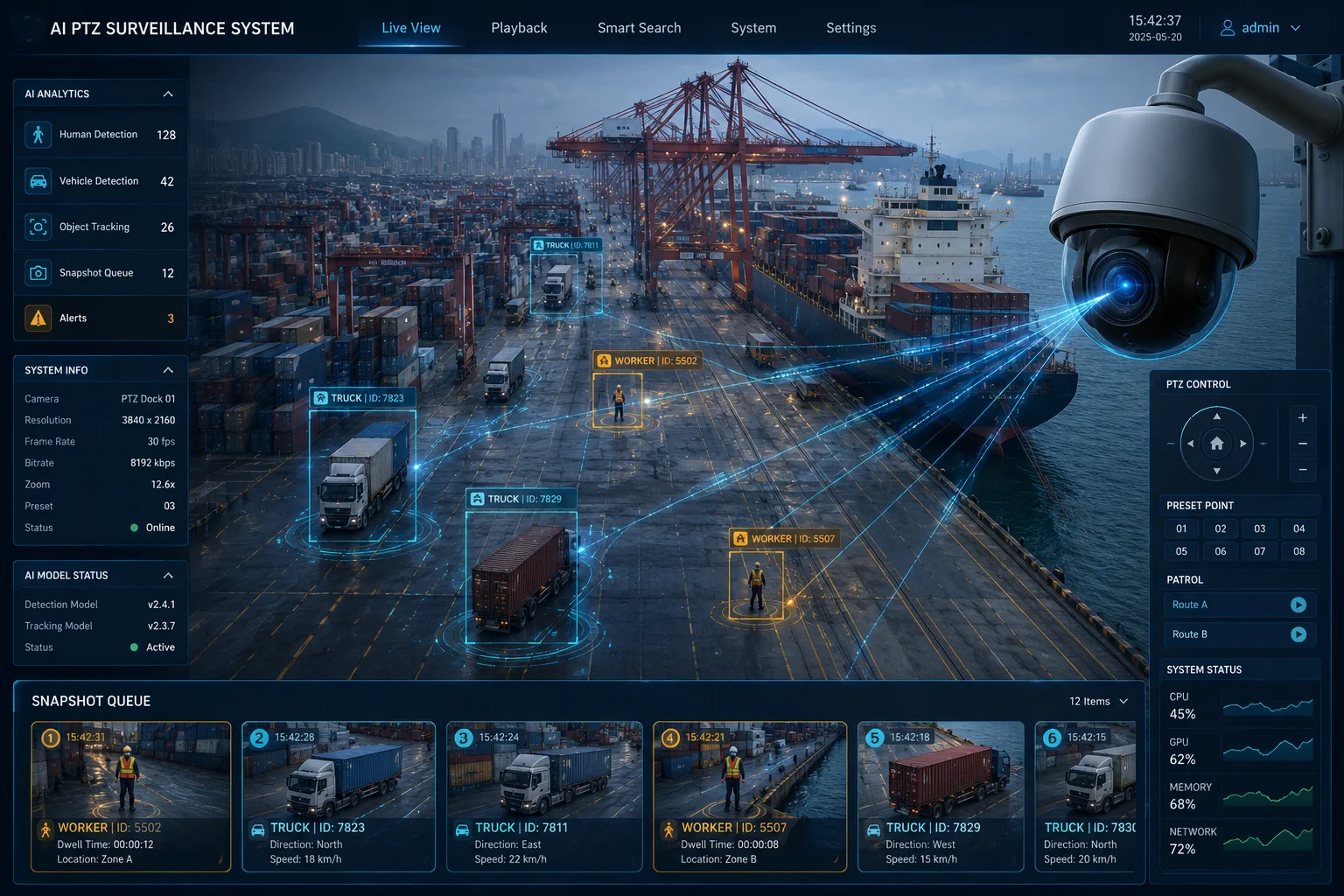
O sistema pode rastrear os 5 principais alvos suspeitos, mantendo uma visão panorâmica, usando uma lógica de dupla camada. A visão fixa mantém toda a cena, e o motor de pontuação de IA2 marca os principais alvos para foco PTZ sem perder a imagem global.
![]() Principais alvos suspeitos rastreados em visão PTZ panorâmica
Principais alvos suspeitos rastreados em visão PTZ panorâmica
Eu uso dois níveis de atenção
Eu separo a cena em dois trabalhos. O primeiro trabalho é a detecção global. O segundo trabalho é o rastreamento focado. A IA escaneia todo o quadro primeiro. Em seguida, ela classifica os alvos por regras como velocidade de movimento3, tipo de alvo, zona de entrada e zona de risco. Depois disso, o PTZ pode travar no alvo de maior prioridade, enquanto a camada panorâmica continua observando o resto.
Mantenho os 5 principais sem perder o contexto
Não trato os 5 principais como cinco alvos iguais. Eu os trato como cinco itens classificados. O sistema sempre sabe qual é o primeiro, o segundo e o terceiro. Isso importa porque uma câmera com cabeça PTZ só pode apontar em uma direção por vez. Se eu ignorar isso, perco tempo e perco movimento. Portanto, mantenho um feed de visão geral estável e deixo a camada PTZ se mover apenas quando as regras dizem que ela deve se mover.
Confio em priorização inteligente, não em alternância cega
Não quero que a câmera fique pulando o tempo todo. Isso cria rastreamento fraco e evidências ruins. Eu uso filtros primeiro. Por exemplo, posso dizer ao sistema para dar mais peso a pessoas, veículos ou alvos em uma área restrita. Também posso diminuir a pontuação para movimentos pequenos perto da borda do quadro. Isso torna a lista dos 5 principais mais útil, porque a câmera segue o que mais importa, não apenas o que se move primeiro.
| Regra de Prioridade | O que ele faz | Por que eu uso |
|---|---|---|
| Velocidade do movimento | Aumenta a pontuação para alvos rápidos | Ajuda a capturar intrusão rápida |
| Tipo de alvo | Prefere pessoa ou veículo | Adapta-se às regras do local |
| Entrada na zona | Impulsiona alvos em áreas chave | Protege portões e cercas |
| Distância do centro | Favorece alvos perto do centro | Reduz o tempo de deslocamento do PTZ |
Mantenho a visão panorâmica para segurança e revisão
Sempre quero que a cena completa permaneça visível. A visão panorâmica me ajuda a verificar o que aconteceu antes e depois do movimento do PTZ. Também me ajuda a verificar se outro alvo entrou no quadro enquanto o PTZ estava ocupado. Isso é útil em pátios, estradas, fazendas e locais grandes. Nesses lugares, um movimento de câmera nunca deve destruir o registro completo da cena. Portanto, trato o rastreamento panorâmico como a camada base e o rastreamento PTZ como a camada de ação.
Como a IA prioriza qual alvo rastrear primeiro com base em regras de segurança personalizadas?
Eu me importo muito com esta parte, porque regras de prioridade ruins podem fazer com que uma câmera forte aja como uma fraca. Quero que a IA siga a lógica do meu local, não apenas o movimento genérico.
A IA prioriza o primeiro alvo usando uma pontuação de regra. Ela verifica o tipo de alvo, localização, velocidade, direção e área de alarme, em seguida, seleciona a pontuação mais alta como o primeiro alvo PTZ. Posso ajustar essas regras para pessoas, veículos, cercas, entradas ou qualquer zona específica do local.
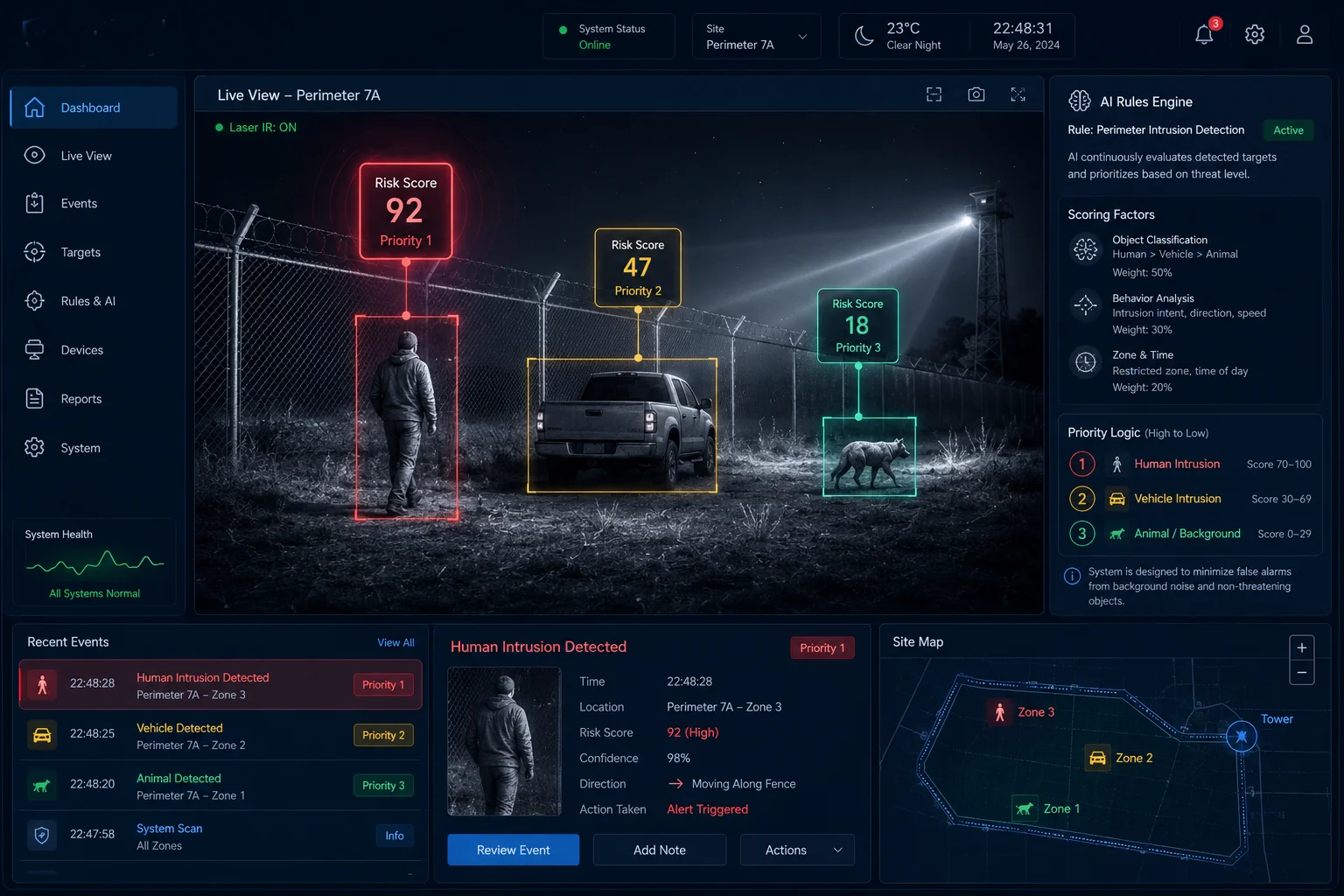 Regras de prioridade de alvo de IA para rastreamento PTZ
Regras de prioridade de alvo de IA para rastreamento PTZ
Defino as regras antes que a câmera comece
Eu nunca deixo a câmera adivinhar tudo sozinha. Eu defino as regras primeiro. Se eu gerencio um armazém, posso querer que pessoas perto das docas de carga tenham a maior prioridade. Se eu gerencio uma fazenda solar, posso querer que o movimento de veículos perto do perímetro tenha a maior prioridade. A IA então usa essas regras como pontuação base. Isso torna o sistema útil para trabalho real, porque cada local tem seu próprio padrão de risco.
Eu pontuo cada alvo de forma simples
Eu gosto de um método de pontuação que seja fácil de ler. A câmera pode atribuir pontos a cada alvo. Uma pessoa em uma zona de não entrada pode receber uma pontuação alta. Um veículo se movendo em direção a um portão também pode receber uma pontuação alta. Um trabalhador andando dentro de uma área segura pode receber uma pontuação menor. Isso não significa que a pontuação menor é ignorada. Significa apenas que a PTZ dá atenção primeiro ao alvo mais importante.
Eu evito mudanças falsas de prioridade
Eu também preciso impedir que o sistema mude de alvo muito rapidamente. Se a IA continuar pulando de um objeto para outro, a PTZ perde tempo e o vídeo fica confuso. Então eu uso tempo de permanência4, verificações de confiança e regras de zona. O tempo de permanência mantém a câmera em um alvo por tempo suficiente para obter detalhes úteis. Verificações de confiança5 garantem que o alvo é real e não ruído. As regras de zona ajudam a IA a se concentrar na área que importa.
| Tipo de Regra | Exemplo | Resultado |
|---|---|---|
| Regra de Zona | Área de violação de cerca | Prioridade mais alta |
| Regra de Objeto | Pessoa sobre movimento de fundo | Melhor escolha de alvo |
| Regra de Velocidade | Veículo rápido perto do portão | Bloqueio PTZ mais rápido |
| Regra de confiança | Pontuação forte de correspondência de IA | Menos trocas erradas |
Mantenho a lógica flexível para diferentes locais
Não uso um conjunto fixo de regras para cada projeto. Um local de fazenda precisa de uma configuração diferente de um portão de cidade ou um pátio de porto. Em um caso, posso querer que a câmera siga pessoas primeiro. Em outro caso, posso querer que ela siga caminhões primeiro. Gosto de sistemas que me permitem mudar isso sem reescrever todo o projeto. É aí que uma plataforma de câmera OEM/ODM forte plataforma de câmera OEM/ODM6 me ajuda, pois posso adaptar o motor de prioridade ao trabalho em vez de forçar o trabalho a se ajustar à câmera.
O PTZ realizará uma sequência de “Disparo Rápido” de instantâneos para múltiplos alvos em uma única área?
Já vi essa solicitação muitas vezes. As pessoas querem evidências rápidas de vários alvos em um só lugar. Entendo o porquê, pois uma cena movimentada pode mudar em segundos.
O PTZ pode executar uma sequência de instantâneos em rápida sucessão7 para vários alvos na mesma área, mas não faz isso em um surto aleatório. Ele usa uma fila, um plano de trajetória de movimento e uma regra de tempo para que cada alvo receba um tiro claro sem desperdiçar o movimento PTZ.
 Sequência de execução de instantâneos PTZ em rápida sucessão
Sequência de execução de instantâneos PTZ em rápida sucessão
Trato a rápida sucessão como velocidade controlada
Não penso em rápida sucessão como “tirar o máximo de fotos possível”. Penso nisso como “tirar as fotos certas rapidamente”. A câmera PTZ gira, amplia, foca, captura e se move para o próximo alvo em uma ordem planejada. Se os alvos estiverem próximos, o sistema pode lidar com vários instantâneos em um curto período. Se estiverem distantes, o PTZ precisa de mais tempo de deslocamento, então a sequência diminui.
Uso a profundidade da fila para proteger a velocidade e a qualidade
A fila é importante porque o PTZ só pode seguir uma direção por vez. Se a fila for muito longa, a câmera pode ficar lenta e menos útil. Se a fila for muito curta, ela pode perder alvos importantes. Gosto de uma fila de médio alcance porque mantém o sistema ocupado sem torná-lo instável. Na prática, uma fila de 8 a 16 alvos geralmente oferece um bom equilíbrio para uso industrial.
Deixo a lógica de trajetória reduzir o movimento desperdiçado
Não quero que o PTZ gire em uma ordem ruim. Isso desperdiça tempo e pode fazer com que a câmera perca o melhor ângulo. Por isso, uso uma lógica de trajetória que reduz o ângulo entre os movimentos dos alvos. A ideia é simples. Se dois alvos estiverem próximos, a câmera deve capturá-los um após o outro. Se um alvo estiver distante, o sistema deve decidir se ainda vale a pena o movimento agora ou depois. É aqui que uma fila inteligente oferece melhores resultados do que uma lista simples.
Mantenho a qualidade da imagem em mente durante a captura rápida
O disparo rápido só funciona se a câmera ainda capturar imagens utilizáveis. Isso significa que o foco, o zoom e o tempo do obturador devem permanecer estáveis. Um sistema fraco pode se mover rapidamente, mas produzir imagens borradas. Eu não aceito isso. Prefiro uma câmera que se move rapidamente e ainda fornece evidências nítidas. É por isso que o zoom óptico, foco preditivo8, e mecânica estável importam ao mesmo tempo.
| Etapa | O que acontece | Por que é importante |
|---|---|---|
| 1 | PTZ seleciona o próximo alvo | Ele segue a fila |
| 2 | A câmera gira para a posição | Ele reduz o atraso |
| 3 | O zoom óptico ajusta | Ele captura detalhes |
| 4 | O foco trava | Ele mantém a imagem nítida |
| 5 | O instantâneo salva | Ele registra evidências |
Eu uso o disparo rápido principalmente em cenas densas
Acho o disparo rápido mais útil em portões, cruzamentos, entradas de pátios e áreas lotadas. Esses locais geralmente têm muitos objetos em movimento em um único quadro. Um bom sistema PTZ pode transformar essa confusão em evidências úteis. Um sistema fraco apenas cria ruído. Por isso, sempre faço uma pergunta simples: a câmera me ajuda a entender a cena mais rápido ou apenas tira mais fotos? Essa pergunta me mantém honesto ao projetar o fluxo de trabalho.
Posso ver a fila de alvos e seu status de processamento em tempo real no meu painel de gerenciamento?
Eu quero esse recurso todas as vezes, porque não gosto de lógica de câmera oculta. Se eu não consigo ver a fila, não consigo confiar no fluxo de trabalho durante um evento ao vivo.
Sim, posso ver a fila de alvos e o status de processamento em tempo real no painel de gerenciamento quando o sistema é construído com a saída de metadados9. adequada. O painel pode mostrar alvos enfileirados, foco PTZ atual, instantâneos processados, alvos ignorados e atualizações de status ao vivo.
 Fila de alvos em tempo real no painel de gerenciamento
Fila de alvos em tempo real no painel de gerenciamento
Preciso de visibilidade clara, não apenas alertas
Um bom painel deve mostrar mais do que alarmes. Quero saber qual alvo entrou na fila, qual está ativo agora e qual já foi processado. Também quero ver por que um alvo foi ignorado, se isso acontecer. Isso me ajuda a depurar problemas de campo rapidamente. Também me ajuda a explicar o comportamento da câmera a um cliente que deseja provas de que o sistema fez a escolha certa.
Gosto de status em tempo real porque economiza tempo
Quando o sistema está ativo, cada segundo conta. Se eu puder ver a fila, posso dizer se a PTZ está se movendo muito lentamente ou se a IA está sobrecarregando a lista. Posso então ajustar as regras, encurtar a fila ou alterar os pesos de prioridade. Isso é muito melhor do que esperar por um relatório do usuário depois que o evento terminar. O status em tempo real me ajuda a corrigir o problema enquanto ele ainda está acontecendo.
Quero que o painel mostre dados práticos
Não preciso de decoração. Preciso de dados úteis. Quero ver ID do alvo, tipo, pontuação, tempo na fila, ângulo atual da PTZ, resultado do instantâneo e status do upload. Se o sistema também armazenar o histórico de eventos, é ainda melhor. Posso então revisar padrões ao longo do tempo e melhorar o conjunto de regras. Isso é útil para projetos de segurança com muitas câmeras e muitos eventos, porque o painel se torna uma ferramenta de controle real em vez de apenas uma tela visual.
Uso o painel para apoiar operações remotas
Em muitos dos meus projetos, o usuário final não está perto do local. O local pode ser uma fazenda, um canteiro de obras ou um perímetro remoto. Portanto, o painel deve ajudar minha equipe a trabalhar de longe. Se a câmera travar, preciso saber por quê. Se a fila crescer demais, preciso vê-la rapidamente. Se a mistura de alvos mudar de pessoas para veículos, preciso ver essa mudança e reagir. É por isso que valorizo uma forte integração do painel. Isso transforma o rastreamento PTZ de uma caixa preta em um sistema que posso gerenciar com confiança.
Conclusão
Posso lidar com muitos alvos, manter os riscos mais altos em vista e mostrar a fila em tempo real quando a lógica PTZ e as regras de IA estão bem ajustadas.
1. Entenda como o desempenho do System-on-Chip afeta os limites de processamento de alvos. ︎↩︎ 2. Veja como os mecanismos de pontuação de IA classificam os alvos para priorização PTZ. ︎↩︎ 3. Aprenda como a velocidade de movimento é usada nas regras de rastreamento de câmeras de segurança. ︎↩︎ 4. Descubra por que o tempo de permanência evita saltos desnecessários da PTZ. ︎↩︎ 5. Entenda como os limites de confiança filtram alarmes falsos no rastreamento de IA. ︎↩︎ 6. Explore como plataformas de câmera personalizáveis adaptam regras de prioridade a diferentes locais. ︎↩︎ 7. Saiba sobre o modo de rajada ou sequências rápidas de instantâneos para múltiplos alvos. ︎↩︎ 8. Entenda como o foco preditivo mantém a nitidez durante movimentos rápidos da PTZ. ︎↩︎ 9. Saiba sobre os padrões de metadados ONVIF para integração de dados de câmera. ︎↩︎