
غالبًا ما أرى فرقًا تضغط على أنظمة PTZ بشدة، ثم تفوت أفضل لقطة أو تفرط في تحميل قائمة الانتظار. أركز على التوازن، لأن التتبع الجيد يعتمد على كل من سرعة الذكاء الاصطناعي والتحكم في PTZ.
يمكن للنظام عادةً اكتشاف 30 إلى 60 هدفًا في إطار واحد والاحتفاظ بـ 8 إلى 16 هدفًا في قائمة انتظار لقطات لتنفيذ PTZ. يعتمد العدد الدقيق على قوة SoC1, ، وكثافة المشهد، وقواعد جدولة PTZ التي تحددها.
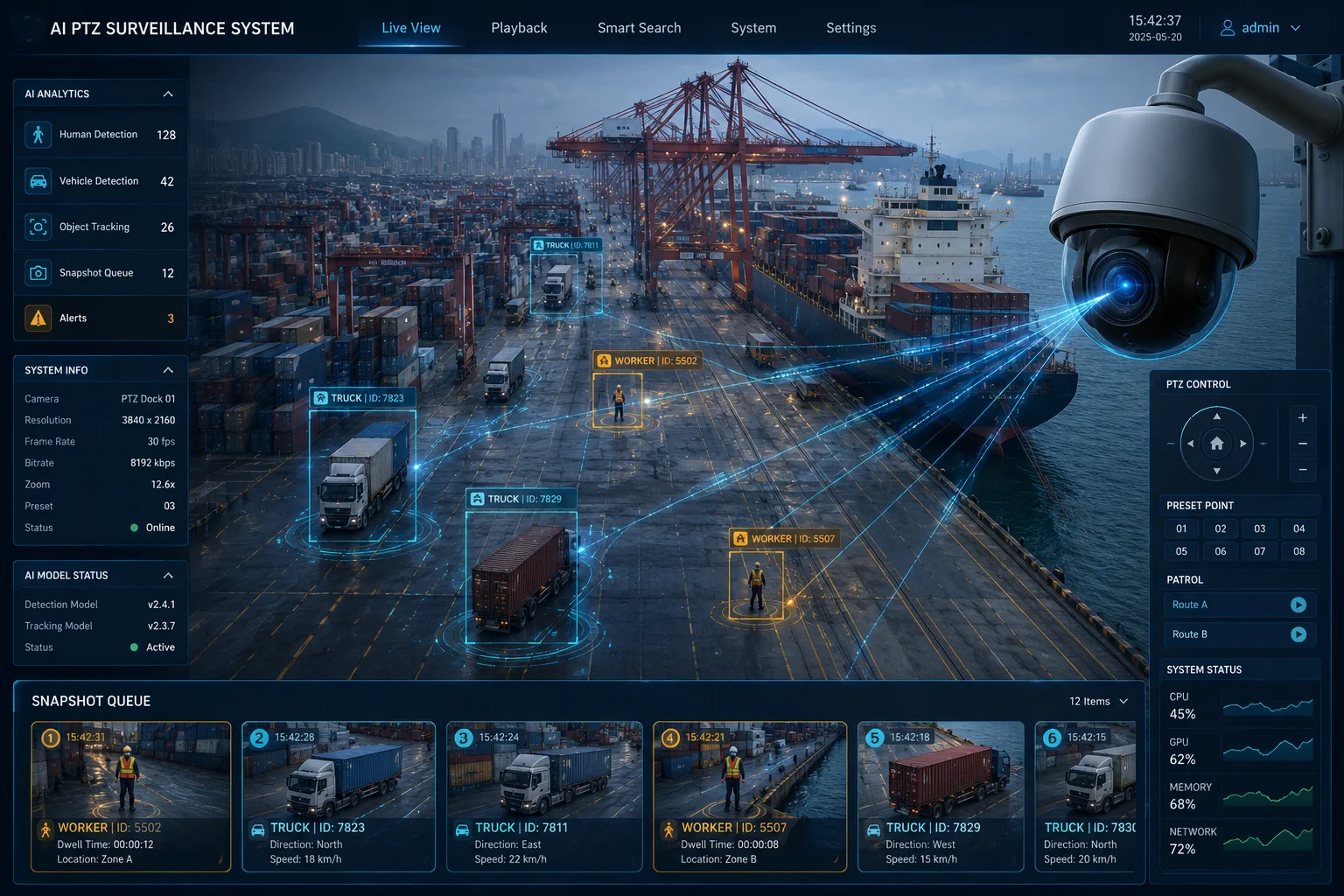 قائمة انتظار لقطات PTZ وتتبع الأهداف
قائمة انتظار لقطات PTZ وتتبع الأهداف
أستخدم هذا النوع من التصميم عندما أحتاج إلى كل من العرض الواسع ولقطات التفاصيل السريعة. إذا كنت تريد معرفة كيفية عمل قائمة الانتظار في الوقت الفعلي، فسأقوم بتفصيلها أدناه.
جدول المحتويات
هل يمكن للنظام تتبع “أكثر 5” أهداف مشبوهة مع الحفاظ على عرض بانورامي؟
أنا أعرف هذه المشكلة جيدًا، لأن المشهد الواسع غالبًا ما يخفي الهدف الأكثر أهمية وهو أمام عينيك مباشرة. أريد الاحتفاظ بالعرض الكامل، ولكني أحتاج أيضًا إلى البقاء على الهدف الأكثر خطورة.
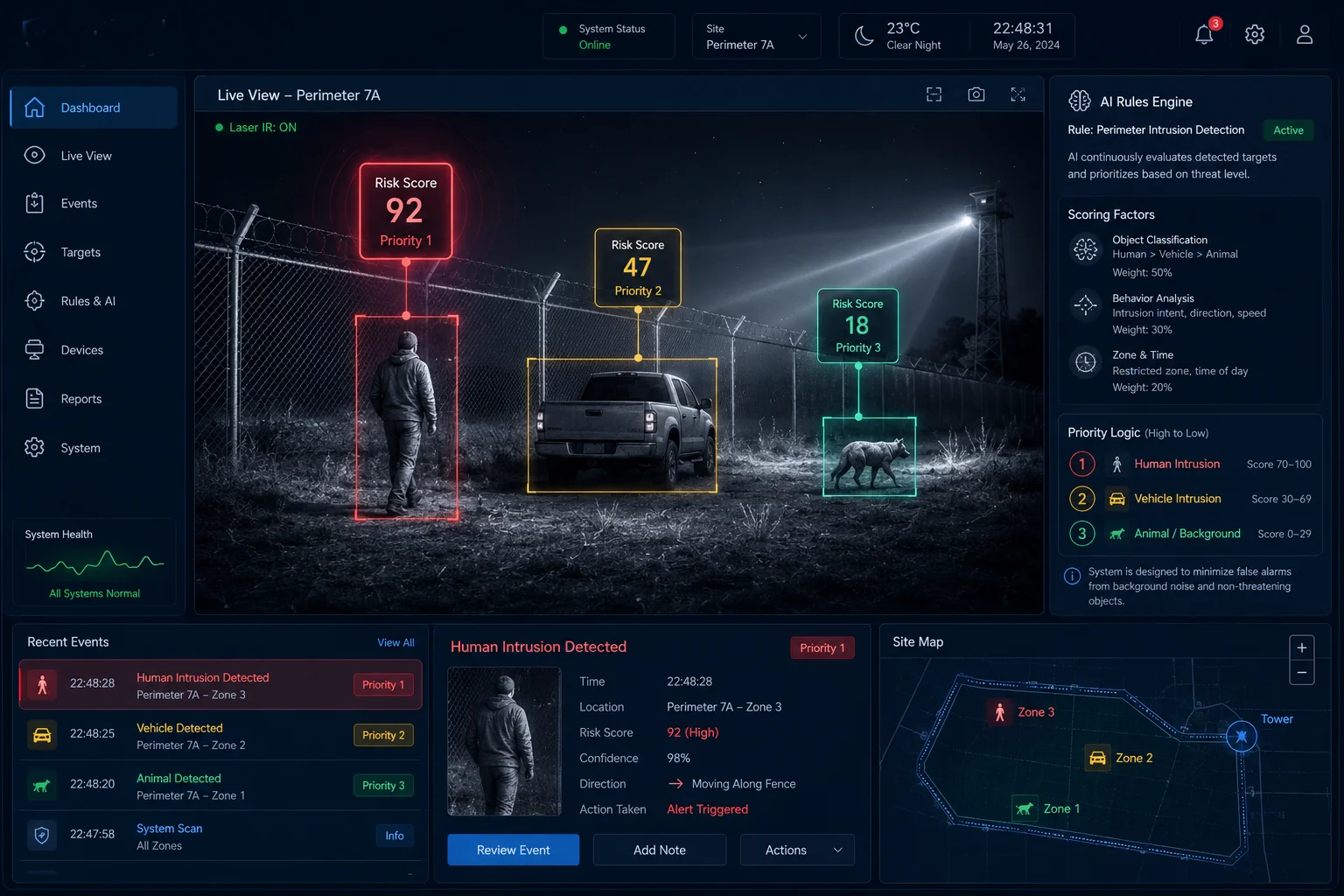
يمكن للنظام تتبع أهم 5 أهداف مشبوهة مع الاستمرار في الاحتفاظ بنظرة عامة بانورامية باستخدام منطق مزدوج الطبقات. يحتفظ العرض الثابت بالمشهد بأكمله، و محرك تسجيل نقاط الذكاء الاصطناعي2 يحدد الأهداف الرئيسية لتركيز PTZ دون فقدان الصورة الشاملة.
![]() تتبع أهم الأهداف المشبوهة في عرض PTZ البانورامي
تتبع أهم الأهداف المشبوهة في عرض PTZ البانورامي
أستخدم مستويين من الانتباه
أفصل المشهد إلى وظيفتين. الوظيفة الأولى هي الكشف الشامل. الوظيفة الثانية هي التتبع المركز. يقوم الذكاء الاصطناعي بمسح الإطار بأكمله أولاً. ثم يقوم بترتيب الأهداف حسب قواعد مثل سرعة الحركة3, ، ونوع الهدف، ومنطقة الدخول، ومنطقة الخطر. بعد ذلك، يمكن لـ PTZ التركيز على الهدف ذي الأولوية الأعلى بينما تستمر الطبقة البانورامية في مراقبة الباقي.
أحافظ على أفضل 5 دون فقدان السياق
لا أتعامل مع أفضل 5 كأهداف متساوية. أتعامل معها كعناصر مرتبة. يعرف النظام دائمًا أيها الأول والثاني والثالث. هذا مهم لأن الكاميرا ذات الرأس PTZ يمكنها فقط الإشارة في اتجاه واحد في كل مرة. إذا تجاهلت ذلك، أفقد الوقت وأفوت الحركة. لذلك أحافظ على تغذية نظرة عامة مستقرة وأترك طبقة PTZ تتحرك فقط عندما تقول القواعد إنها يجب أن تتحرك.
أعتمد على تحديد الأولويات الذكي، وليس التبديل الأعمى
لا أريد أن تقفز الكاميرا باستمرار. هذا يخلق تتبعًا ضعيفًا وأدلة سيئة. أستخدم المرشحات أولاً. على سبيل المثال، يمكنني إخبار النظام بإعطاء وزن أكبر للأشخاص أو المركبات أو الأهداف في منطقة مقيدة. يمكنني أيضًا خفض النتيجة للحركة الصغيرة بالقرب من حافة الإطار. هذا يجعل قائمة أفضل 5 أكثر فائدة، لأن الكاميرا تتبع ما هو الأكثر أهمية، وليس فقط ما يتحرك أولاً.
| قاعدة الأولوية | ما هي وظيفتها | لماذا أستخدمها |
|---|---|---|
| سرعة الحركة | تزيد النتيجة للأهداف السريعة | تساعد في اكتشاف التسلل السريع |
| نوع الهدف | تفضل الشخص أو المركبة | تتناسب مع قواعد الموقع |
| دخول المنطقة | تعزز الأهداف في المناطق الرئيسية | تحمي البوابات والأسوار |
| المسافة المركزية | تفضل الأهداف القريبة من المركز | تقلل وقت انتقال PTZ |
أحافظ على العرض البانورامي للسلامة والمراجعة
أريد دائمًا أن تظل المشهد الكامل مرئيًا. يساعدني العرض البانورامي على التحقق مما حدث قبل وبعد تحرك PTZ. كما يساعدني على التحقق مما إذا كان هدف آخر قد دخل الإطار أثناء انشغال PTZ. هذا مفيد في الساحات والطرق والمزارع والمواقع الكبيرة. في تلك الأماكن، لا ينبغي لحركة كاميرا واحدة أن تدمر سجل المشهد الكامل. لذلك أتعامل مع التتبع البانورامي كطبقة أساسية وتتبع PTZ كطبقة حركة.
كيف يحدد الذكاء الاصطناعي أولوية الهدف الذي يجب تتبعه أولاً بناءً على قواعد الأمان المخصصة؟
أهتم بهذا الجزء كثيرًا، لأن قواعد الأولوية السيئة يمكن أن تجعل الكاميرا القوية تتصرف مثل الكاميرا الضعيفة. أريد أن يتبع الذكاء الاصطناعي منطق موقعي، وليس مجرد الحركة العامة.
تعطي الذكاء الاصطناعي الأولوية للهدف الأول باستخدام درجة القاعدة. يتحقق من نوع الهدف وموقعه وسرعته واتجاهه ومنطقة الإنذار، ثم يختار أعلى درجة كهدف PTZ الأول. يمكنني ضبط هذه القواعد للأشخاص أو المركبات أو خطوط السياج أو المداخل أو أي منطقة خاصة بالموقع.
 قواعد أولوية أهداف الذكاء الاصطناعي لتتبع PTZ
قواعد أولوية أهداف الذكاء الاصطناعي لتتبع PTZ
أحدد القواعد قبل بدء الكاميرا
لا أدع الكاميرا تخمن كل شيء بنفسها أبدًا. أضع القواعد أولاً. إذا كنت أدير مستودعًا، فقد أرغب في أن يحتل الأشخاص القريبون من أرصفة التحميل أعلى مرتبة. إذا كنت أدير مزرعة للطاقة الشمسية، فقد أرغب في أن يحتل تحرك المركبات بالقرب من المحيط أعلى مرتبة. يستخدم الذكاء الاصطناعي بعد ذلك تلك القواعد كنقاط أساسية. هذا يجعل النظام مفيدًا للعمل الحقيقي، لأن كل موقع له نمط المخاطر الخاص به.
أسجل كل هدف بطريقة بسيطة
أحب طريقة تسجيل سهلة القراءة. يمكن للكاميرا تعيين نقاط لكل هدف. قد يحصل الشخص الموجود في منطقة ممنوع الدخول عليها على درجة عالية. قد تحصل السيارة المتحركة باتجاه بوابة أيضًا على درجة عالية. قد يحصل العامل الذي يمشي داخل منطقة آمنة على درجة أقل. هذا لا يعني تجاهل الدرجة الأقل. هذا يعني فقط أن PTZ يعطي الاهتمام الأول للهدف الأكثر أهمية.
أتجنب تحولات الأولوية الخاطئة
أحتاج أيضًا إلى منع النظام من تغيير الأهداف بسرعة كبيرة. إذا استمر الذكاء الاصطناعي في التنقل من كائن إلى آخر، فإن PTZ يضيع الوقت ويبدو الفيديو فوضويًا. لذلك أستخدم وقت المكوث4, ، فحوصات الثقة، وقواعد المنطقة. يمنع وقت الاستقرار الكاميرا من التركيز على هدف واحد لفترة كافية للحصول على تفاصيل مفيدة. فحوصات الثقة5 تتأكد من أن الهدف حقيقي وليس ضوضاء. تساعد قواعد المنطقة الذكاء الاصطناعي على التركيز على المنطقة المهمة.
| نوع القاعدة | مثال | النتيجة |
|---|---|---|
| قاعدة المنطقة | منطقة خرق السياج | أولوية أعلى |
| قاعدة الكائن | شخص مقابل حركة الخلفية | اختيار هدف أفضل |
| قاعدة السرعة | مركبة سريعة بالقرب من البوابة | قفل PTZ أسرع |
| قاعدة الثقة | درجة تطابق الذكاء الاصطناعي القوية | عدد أقل من التبديلات الخاطئة |
أحافظ على مرونة المنطق لمواقع مختلفة
لا أستخدم مجموعة قواعد ثابتة لكل مشروع. يحتاج موقع مزرعة إلى إعداد مختلف عن بوابة مدينة أو ساحة ميناء. في إحدى الحالات، قد أرغب في أن تتبع الكاميرا الأشخاص أولاً. في حالة أخرى، قد أرغب في أن تتبع الشاحنات أولاً. أحب الأنظمة التي تسمح لي بتغيير هذا دون إعادة كتابة المشروع بأكمله. هذا هو المكان الذي يكون فيه شيء قوي منصة كاميرا OEM/ODM6 تساعدني، لأنني أستطيع تكييف محرك الأولوية مع المهمة بدلاً من إجبار المهمة على ملاءمة الكاميرا.
هل سيقوم PTZ بتنفيذ تسلسل “إطلاق نار سريع” للقطات لأهداف متعددة في منطقة واحدة؟
لقد رأيت هذا الطلب مرات عديدة. يريد الناس أدلة سريعة من أهداف متعددة في مكان واحد. أفهم السبب، لأن المشهد المزدحم يمكن أن يتغير في ثوانٍ.
يمكن لـ PTZ أداء تسلسل لقطات سريع7 لأهداف متعددة في نفس المنطقة، لكنها لا تفعل ذلك في دفعة عشوائية. تستخدم قائمة انتظار، وخطة مسار حركة، وقاعدة توقيت بحيث يحصل كل هدف على لقطة واضحة دون إهدار حركة PTZ.
 تسلسل تنفيذ لقطات PTZ السريعة
تسلسل تنفيذ لقطات PTZ السريعة
أتعامل مع السرعة العالية على أنها سرعة متحكم بها
لا أفكر في السرعة العالية على أنها “التقاط أكبر عدد ممكن من الصور”. أفكر فيها على أنها “التقاط الصور الصحيحة بسرعة”. تدور كاميرا PTZ، وتقوم بالتقريب، والتركيز، والالتقاط، وتنتقل إلى الهدف التالي بترتيب مخطط. إذا كانت الأهداف قريبة من بعضها البعض، يمكن للنظام التعامل مع عدة لقطات في وقت قصير. إذا كانت بعيدة عن بعضها البعض، تحتاج PTZ إلى مزيد من وقت السفر، لذلك يتباطأ التسلسل.
أستخدم عمق قائمة الانتظار لحماية السرعة والجودة
قائمة الانتظار مهمة لأن PTZ يمكنها فقط اتباع اتجاه واحد في كل مرة. إذا كانت قائمة الانتظار طويلة جدًا، فقد تصبح الكاميرا بطيئة وأقل فائدة. إذا كانت قائمة الانتظار قصيرة جدًا، فقد تفوت الأهداف المهمة. أحب قائمة انتظار متوسطة المدى لأنها تبقي النظام مشغولاً دون جعله غير مستقر. في الممارسة العملية، غالبًا ما توفر قائمة انتظار من 8 إلى 16 هدفًا توازنًا جيدًا للاستخدام الصناعي.
أسمح لمنطق المسار بتقليل الحركة المهدرة
لا أريد أن تدور PTZ بترتيب سيء. هذا يهدر الوقت ويمكن أن يجعل الكاميرا تفوت أفضل لقطة. لذلك أستخدم منطق مسار يقلل الزاوية بين حركات الأهداف. الفكرة بسيطة. إذا كان هدفان قريبين، يجب على الكاميرا التقاطهما واحدًا تلو الآخر. إذا كان هدف بعيدًا، يجب على النظام تحديد ما إذا كان لا يزال يستحق الحركة الآن أو لاحقًا. هذا هو المكان الذي تعطي فيه قائمة انتظار ذكية نتائج أفضل من قائمة عادية.
أضع جودة الصورة في الاعتبار أثناء الالتقاط السريع
لا تعمل اللقطات السريعة إلا إذا كانت الكاميرا لا تزال تحصل على صور قابلة للاستخدام. هذا يعني أن التركيز، والتقريب، وتوقيت الغالق يجب أن يظل ثابتًا. قد يتحرك النظام الضعيف بسرعة ولكنه ينتج لقطات ضبابية. أنا لا أقبل ذلك. أفضل كاميرا تتحرك بسرعة ولا تزال تقدم دليلًا واضحًا. لهذا السبب، التقريب البصري،, التركيز التنبؤي8, ، والميكانيكا المستقرة كلها مهمة في نفس الوقت.
| الخطوة | ما يحدث | ما أهمية ذلك |
|---|---|---|
| 1 | تحدد PTZ الهدف التالي | تتبع الطابور |
| 2 | تدور الكاميرا إلى الموضع | تقلل التأخير |
| 3 | يتم ضبط التقريب البصري | تلتقط التفاصيل |
| 4 | يتم تثبيت التركيز | تحافظ على الصورة واضحة |
| 5 | يتم حفظ اللقطة | تسجل الأدلة |
أستخدم اللقطات السريعة في الغالب في المشاهد الكثيفة
أجد اللقطات السريعة الأكثر فائدة عند البوابات، والتقاطعات، ومداخل الساحات، والمناطق المزدحمة. غالبًا ما تحتوي هذه الأماكن على العديد من الأجسام المتحركة في إطار واحد. يمكن لنظام PTZ جيد تحويل هذه الفوضى إلى أدلة مفيدة. النظام الضعيف يخلق ضوضاء فقط. لذلك، أسأل دائمًا سؤالًا بسيطًا: هل تساعدني الكاميرا في فهم المشهد بشكل أسرع، أم أنها تلتقط المزيد من الصور فقط؟ هذا السؤال يجعلني صادقًا عندما أصمم سير العمل.
هل يمكنني رؤية قائمة انتظار الأهداف وحالة معالجتها في الوقت الفعلي على لوحة تحكم الإدارة الخاصة بي؟
أريد هذه الميزة في كل مرة، لأنني لا أحب منطق الكاميرا المخفي. إذا لم أتمكن من رؤية الطابور، فلا يمكنني الوثوق بسير العمل أثناء حدث مباشر.
نعم، يمكنني رؤية طابور الأهداف وحالة المعالجة في الوقت الفعلي على لوحة تحكم الإدارة عندما يتم بناء النظام باستخدام إخراج البيانات الوصفية9. المناسب. يمكن للوحة التحكم عرض الأهداف في الطابور، وتركيز PTZ الحالي، واللقطات المعالجة، والأهداف التي تم تخطيها، وتحديثات الحالة المباشرة.
 طابور الأهداف في الوقت الفعلي على لوحة تحكم الإدارة
طابور الأهداف في الوقت الفعلي على لوحة تحكم الإدارة
أحتاج إلى رؤية واضحة، وليس مجرد تنبيهات
يجب أن تعرض لوحة المعلومات الجيدة أكثر من مجرد إنذارات. أريد أن أعرف أي هدف دخل قائمة الانتظار، وأيها نشط الآن، وأيها تمت معالجته بالفعل. أريد أيضًا أن أرى سبب تخطي هدف ما، إذا حدث ذلك. هذا يساعدني على استكشاف مشكلات المجال بسرعة. كما أنه يساعدني على شرح سلوك الكاميرا للعميل الذي يريد دليلاً على أن النظام اتخذ القرار الصحيح.
أحب الحالة في الوقت الفعلي لأنها توفر الوقت
عندما يكون النظام مباشرًا، كل ثانية مهمة. إذا استطعت رؤية قائمة الانتظار، يمكنني معرفة ما إذا كانت PTZ تتحرك ببطء شديد أو إذا كان الذكاء الاصطناعي يفرط في تحميل القائمة. يمكنني بعد ذلك تعديل القواعد، أو تقصير قائمة الانتظار، أو تغيير أوزان الأولوية. هذا أفضل بكثير من انتظار تقرير المستخدم بعد انتهاء الحدث. تساعدني الحالة في الوقت الفعلي على إصلاح المشكلة أثناء حدوثها.
أريد أن تعرض لوحة المعلومات بيانات عملية
لا أحتاج إلى زخرفة. أحتاج إلى بيانات مفيدة. أريد رؤية معرف الهدف، ونوعه، ودرجته، ووقت الانتظار في القائمة، وزاوية PTZ الحالية، ونتيجة اللقطة، وحالة التحميل. إذا كان النظام يخزن أيضًا سجل الأحداث، فهذا أفضل. يمكنني بعد ذلك مراجعة الأنماط بمرور الوقت وتحسين مجموعة القواعد. هذا مفيد لمشاريع الأمان التي تحتوي على العديد من الكاميرات والعديد من الأحداث، لأن لوحة المعلومات تصبح أداة تحكم حقيقية بدلاً من مجرد شاشة مرئية.
أستخدم لوحة المعلومات لدعم العمليات عن بُعد
في العديد من مشاري، لا يكون المستخدم النهائي قريبًا من الموقع. قد يكون الموقع مزرعة، أو ساحة بناء، أو محيطًا بعيدًا. لذلك يجب أن تساعد لوحة المعلومات فريقي على العمل من بعيد. إذا علقت الكاميرا، أحتاج إلى معرفة السبب. إذا طالت قائمة الانتظار، أحتاج إلى رؤيتها بسرعة. إذا تغير مزيج الأهداف من الأشخاص إلى المركبات، أحتاج إلى رؤية هذا التحول والاستجابة. لهذا السبب أقدر التكامل القوي للوحة المعلومات. إنه يحول تتبع PTZ من صندوق أسود إلى نظام يمكنني إدارته بثقة.
الخاتمة
يمكنني التعامل مع العديد من الأهداف، والحفاظ على المخاطر العليا قيد العرض، وعرض قائمة الانتظار في الوقت الفعلي عندما تكون منطق PTZ وقواعد الذكاء الاصطناعي مضبوطة جيدًا.
1. فهم كيف يؤثر أداء System-on-Chip على حدود معالجة الأهداف. ︎↩︎ 2. رؤية كيف تصنف محركات تسجيل الذكاء الاصطناعي الأهداف لتحديد أولويات PTZ. ︎↩︎ 3. تعلم كيف تُستخدم سرعة الحركة في قواعد تتبع كاميرات الأمان. ︎↩︎ 4. اكتشاف سبب منع وقت الانتظار للقفزات غير الضرورية في PTZ. ︎↩︎ 5. فهم كيف تقوم عتبات الثقة بتصفية الإنذارات الكاذبة في تتبع الذكاء الاصطناعي. ︎↩︎ 6. استكشاف كيف تتكيف منصات الكاميرا القابلة للتخصيص مع قواعد الأولوية للمواقع المختلفة. ︎↩︎ 7. التعرف على وضع الاندفاع أو تسلسلات اللقطات السريعة لأهداف متعددة. ︎↩︎ 8. فهم كيف يحافظ التركيز التنبؤي على الحدة أثناء حركات PTZ السريعة. ︎↩︎ 9. التعرف على معايير بيانات ONVIF الوصفية لتكامل بيانات الكاميرا. ︎↩︎