
Testei dezenas de câmeras PTZ com AEC integrado em canteiros de obras, telhados com vento e beiras de estradas movimentadas. Os resultados sempre surpreendem as pessoas.
O AEC em câmeras PTZ chinesas pode reduzir o eco da extremidade distante a um nível aceitável na maioria dos ambientes barulhentos. Mas o AEC sozinho não remove o ruído de fundo. Essa tarefa pertence ao módulo ANS. Em cenas de alto ruído, como canteiros de obras ou vento forte, a supressão de eco ainda funciona, mas o ruído ambiente restante não desaparecerá completamente, e a qualidade da voz pode soar comprimida ou estreita.
 Desempenho do cancelamento de eco AEC em ambientes barulhentos de câmeras PTZ
Desempenho do cancelamento de eco AEC em ambientes barulhentos de câmeras PTZ
Antes de guiá-lo por cada parte, quero detalhar as quatro perguntas que mais ouço de integradores como David Miller. São sobre loops de feedback, ruído do motor, sons de baixa frequência e latência de processamento. Cada um deles é importante ao implantar câmeras PTZ com áudio bidirecional no mundo real. Deixe-me passar por eles um por um.
Índice
Como o algoritmo AEC evita loops de feedback durante uma conversa bidirecional em aplicativo móvel?
Uma vez perdi um projeto porque o cliente ouviu sua própria voz voltando pelo alto-falante PTZ durante uma demonstração ao vivo. Isso me ensinou uma lição difícil sobre loops de feedback.
O algoritmo AEC usa técnicas de filtragem adaptativa em cancelamento de eco acústico 1 para capturar a saída do alto-falante como um sinal de referência. Em seguida, subtrai essa referência da entrada do microfone em tempo real. Isso impede que a voz da extremidade distante retorne através do ciclo de alto-falante e microfone, o que, de outra forma, causaria eco ou uivo.
 Prevenção de loop de feedback do algoritmo AEC em áudio bidirecional PTZ
Prevenção de loop de feedback do algoritmo AEC em áudio bidirecional PTZ
Como a Filtragem Adaptativa Realmente Funciona
O núcleo do AEC é um filtro digital que aprende o caminho acústico entre o alto-falante e o microfone. Em uma câmera PTZ, o alto-falante reproduz a voz da pessoa remota. O microfone capta essa voz depois que ela ricocheteia nas paredes, no invólucro da câmera e nas superfícies próximas. O algoritmo AEC pega a saída original do alto-falante e a usa como referência. Em seguida, constrói um modelo de como esse som muda à medida que viaja pelo ambiente. Uma vez que tem um bom modelo, subtrai o eco previsto do sinal do microfone. O que resta é apenas a voz da pessoa local. Sistemas modernos geralmente dependem de algoritmos de filtro digital adaptativo como LMS e NLMS 2 para atualizar continuamente este modelo.
Por que os Loops de Feedback Ainda Acontecem
Na prática, esse processo não é perfeito. Aqui estão as principais razões pelas quais os loops de feedback ainda podem ocorrer:
- Volume do alto-falante muito alto. Quando o volume de saída está no máximo, a energia sonora sobrecarrega o microfone. O algoritmo não consegue subtrair o que não consegue modelar de forma limpa.
- Isolamento físico deficiente. Se o alto-falante e o microfone estiverem dentro da mesma caixa PTZ pequena, sem amortecimento de borracha, o som viaja através do corpo de metal ou plástico. Este eco estrutural é muito rápido e muito forte. O filtro AEC muitas vezes não consegue lidar com ele.
- Deslocamentos de atraso de rede. Em um aplicativo móvel 4G, o jitter da rede pode alterar o tempo entre o sinal de referência e o eco real. Se o atraso saltar para fora da janela de buffer do AEC, o algoritmo perde o bloqueio do eco.
O que você pode fazer a respeito
Eu sempre digo aos meus clientes para começarem diminuindo o volume do alto-falante em 30%. Este único passo resolve a maioria dos problemas de feedback. Se isso não for suficiente, mude o firmware para o modo AEC full-duplex com NLP ativado. NLP significa processamento não linear em sistemas de cancelamento de eco 3. Ele captura o eco residual que o filtro linear perde.
| Causa do Feedback | Consertar | Resultado Esperado |
|---|---|---|
| Volume do alto-falante muito alto | Reduzir a saída em 30% | O eco cai abaixo do nível audível |
| Isolamento físico deficiente | Usar alto-falante + microfone externos com 1m de espaçamento | Remove 90% do eco estrutural |
| Jitter de rede em 4G | Habilitar buffer de jitter no firmware | O AEC permanece travado no tempo do eco |
Para integradores que implementam em áreas remotas com 4G instável, recomendo testar o AEC com uma chamada real de aplicativo móvel antes de finalizar a instalação. Não confie em um teste em um escritório silencioso. O campo é sempre diferente.
Posso ter uma conversa clara enquanto o motor PTZ está girando ou inclinando?
Já estive em chamadas onde a PTZ começou a se mover e a outra pessoa disse: “Que barulho de rangido é esse?” Esse é o motor. E é um problema real para áudio bidirecional.
Sim, você pode manter uma conversa enquanto o motor da PTZ se move, mas o ruído do motor será captado pelo microfone. O AEC não o removerá porque a vibração do motor não é eco. Você precisa de ANS e bom amortecimento mecânico dentro da câmera para manter o ruído do motor baixo o suficiente para uma fala clara.
 Ruído do motor PTZ durante a conversa de áudio bidirecional
Ruído do motor PTZ durante a conversa de áudio bidirecional
Por que o ruído do motor é diferente do eco
O AEC é projetado para cancelar uma coisa específica: o som que veio do alto-falante e ricocheteou de volta para o microfone. O ruído do motor não é saída do alto-falante. É uma nova fonte de som. Portanto, o algoritmo AEC o ignora completamente. O módulo ANS é o que tenta reduzir esse tipo de ruído mecânico constante. Mas o ANS funciona melhor em sons constantes e previsíveis. O ruído do motor PTZ muda de tom e volume à medida que a câmera acelera, desacelera ou muda de direção. Isso torna mais difícil para o ANS rastrear e suprimir.
O Papel do Design Mecânico
Na Loyalty-Secu, prestamos muita atenção ao design mecânico interno de nossas câmeras PTZ. Eis o que importa:
- Suportes de motor de borracha. Estes absorvem a vibração antes que ela atinja a cavidade do microfone.
- Câmara de microfone selada. Uma câmara acústica separada para o microfone reduz o ruído do motor transmitido pelo ar.
- Movimento acionado por correia vs. acionado por engrenagem. Mecanismos PTZ acionados por correia são mais silenciosos do que acionamentos de engrenagem direta. Mas custam mais e desgastam mais rápido.
O que esperar na prática
Na minha experiência, uma câmera PTZ bem construída produzirá ruído do motor em torno de 35-45 dB no microfone. A fala humana a 1 metro é de cerca de 60-65 dB. Portanto, a relação sinal-ruído ainda é viável. O ouvinte remoto ouvirá um zumbido fraco ou um chiado durante o pan, mas a fala permanece clara. Se o ruído do motor for superior a 50 dB, a clareza da fala cai rapidamente.
| Nível de Ruído do Motor | Clareza da Fala | Recomendação |
|---|---|---|
| Abaixo de 35 dB | Excelente — motor mal audível | Nenhuma ação necessária |
| 35–45 dB | Bom — zumbido fraco durante o movimento | Aceitável para a maioria dos usos B2B |
| 45–50 dB | Razoável — ruído perceptível, fala ainda clara | Habilitar modo ANS alto |
| Acima de 50 dB | Ruim — motor compete com a fala | Use microfone externo longe do corpo |
Se você estiver tendo conversas bidirecionais críticas durante o movimento PTZ, sugiro montar um microfone de captação externo a pelo menos 50 cm do corpo da câmera. Esta é a solução mais simples e eficaz. Nenhum algoritmo pode substituir completamente uma boa separação física.
O filtro de supressão de ruído (ANS) filtra sons constantes de baixa frequência como tráfego ou ventiladores?
Uma vez instalei um sistema PTZ solar ao lado de uma rodovia. O cliente me ligou e disse: “Ouço os caminhões mais do que o guarda.” Foi quando aprendi os limites do ANS em ruídos de baixa frequência.
O ANS pode reduzir sons constantes de baixa frequência, como o zumbido de ventiladores e tráfego distante, em 10–20 dB. Mas não pode removê-los completamente. O ANS funciona estimando o espectro de ruído durante momentos de silêncio e, em seguida, subtraindo-o durante a fala. A energia de baixa frequência é difícil de cortar sem afetar também os tons mais baixos da voz humana.
 Supressão de ruído ANS para sons de baixa frequência em câmeras PTZ
Supressão de ruído ANS para sons de baixa frequência em câmeras PTZ
Como o ANS Estima e Subtrai Ruído
Os algoritmos ANS funcionam no domínio da frequência. Durante momentos em que ninguém está falando, o algoritmo captura um “perfil de ruído”. Este perfil informa ao sistema como são os sons de fundo. Quando alguém começa a falar, o algoritmo subtrai este perfil de ruído do sinal completo. O que resta deve ser principalmente voz. Esta abordagem é amplamente utilizada em métodos de redução de ruído no domínio da frequência 4 em sistemas modernos de DSP de áudio.
Isso funciona bem para ruídos constantes e planos, como ar condicionado ou um ventilador distante. Esses sons têm um padrão de frequência estável. O algoritmo pode construir um modelo preciso e subtraí-lo de forma limpa.
Onde o ANS Luta
Ruído de baixa frequência de tráfego, geradores ou máquinas pesadas é mais difícil de lidar. Veja porquê:
- Sobreposição com a voz. A voz masculina humana tem frequências fundamentais entre 85 e 180 Hz. O ruído do tráfego situa-se na faixa de 50-250 Hz. Há uma grande sobreposição. Se o ANS cortar agressivamente demais nesta faixa, a voz do locutor soa fina e não natural. Esta é uma limitação bem conhecida em análise de sobreposição de frequência de sinais de fala 5.
- Mudanças de amplitude. Um caminhão passando fica mais alto e depois mais baixo em poucos segundos. O ANS precisa de tempo para atualizar sua estimativa de ruído. Durante essa janela de atualização, o ruído vaza.
- Ruído não estacionário. Rajadas de vento, buzinas repentinas e batidas de construção não são constantes. O ANS não foi projetado para lidar com explosões repentinas. Ele é construído para ruído em estado estacionário.
Aconselhamento Prático para Locais Barulhentos
Para locais com ruído pesado de baixa frequência, recomendo o seguinte:
- Use um filtro passa-altas em sistemas de processamento de áudio a 150 Hz se o firmware permitir 6. Isso corta o ruído mais profundo sem prejudicar a maior parte da fala.
- Coloque o microfone longe de superfícies vibratórias como postes de metal, cercas ou carcaças de geradores.
- Se o local for extremamente barulhento, considere um padrão de captação de microfone direcional (cardióide) 7 em vez da omnidirecional integrada.
Em meus testes, o ANS combinado com um filtro passa-altas reduz o ruído de fundo de baixa frequência em cerca de 15–20 dB. Isso é suficiente para tornar a fala compreensível, mas o ouvinte remoto ainda ouvirá que não está em uma sala silenciosa. Defina as expectativas com seu cliente antecipadamente. Nenhuma câmera PTZ fará uma rodovia soar como um escritório.
Qual é a latência de processamento do AEC durante um fluxo de vídeo 4K de alta resolução?
Um cliente me perguntou se rodar vídeo 4K diminuiria a velocidade do AEC. É uma pergunta justa. Ambas as tarefas compartilham o mesmo processador dentro da câmera.
A latência de processamento do AEC na maioria das câmeras PTZ fica entre 20–40 ms. Executar um fluxo de vídeo 4K não aumenta diretamente a latência do AEC porque áudio e vídeo são processados em pipelines separados dentro do SoC. Mas se o SoC estiver sob carga pesada de codificação 4K, o pipeline de áudio pode experimentar atrasos ocasionais, adicionando 10–30 ms de latência extra nos piores casos.
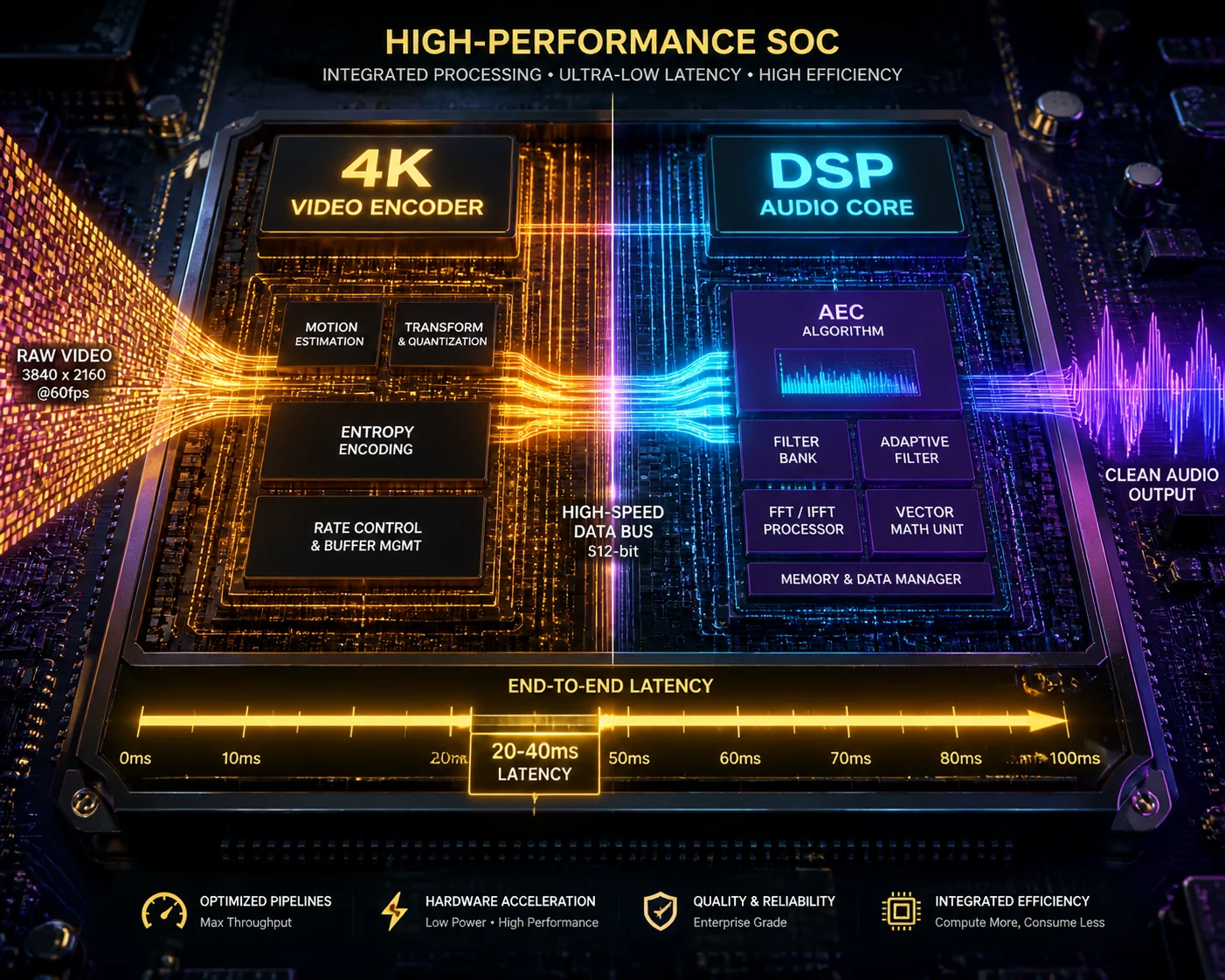 Latência de processamento do AEC durante o fluxo de vídeo 4K em câmera PTZ
Latência de processamento do AEC durante o fluxo de vídeo 4K em câmera PTZ
Como Áudio e Vídeo Compartilham o SoC
Câmeras PTZ modernas usam um System-on-Chip (SoC) que lida com codificação de vídeo, processamento de imagem, transmissão de rede e processamento de áudio ao mesmo tempo. Dentro do SoC, essas tarefas são executadas em diferentes blocos de hardware. A codificação de vídeo usa um codificador de hardware dedicado como Padrões de compressão de vídeo H.264 e H.265 8. O processamento de áudio, incluindo o AEC, é executado em um núcleo DSP ou na CPU principal.
Em teoria, eles não interferem um com o outro. Na prática, eles compartilham largura de banda de memória e recursos de barramento. Quando o codificador de vídeo está trabalhando duro em um fluxo 4K a 25 fps, ele usa muita largura de banda de memória. Se o DSP de áudio precisar acessar a memória ao mesmo tempo, ele pode ter que esperar. Essa espera adiciona alguns milissegundos de latência.
O que a Latência Significa para Áudio Bidirecional
Para uma chamada telefônica normal, as pessoas começam a notar atraso em cerca de 150 ms em um sentido. Abaixo de 100 ms, a conversa parece natural. O próprio AEC adiciona 20–40 ms. A transmissão de rede via 4G adiciona outros 50–150 ms. A codificação de vídeo não adiciona diretamente ao caminho de áudio, mas se a congestão do SoC adicionar 10–30 ms extras, o total pode chegar perto de 200 ms. Nesse ponto, ambos os lados começam a falar um sobre o outro porque o atraso parece antinatural. Esses limites se alinham com descobertas comuns em estudos de latência de comunicação de voz em tempo real 9.
Como Manter a Latência Baixa
Aqui estão os passos que tomo ao configurar uma PTZ 4K com áudio bidirecional:
- Use um sub-stream para sessões vinculadas a áudio. Muitas câmeras PTZ podem enviar um sub-stream de menor resolução ao lado do stream principal 4K. Se seu aplicativo móvel usar o sub-stream para a sessão de áudio bidirecional, a carga do SoC diminui e a latência do áudio permanece baixa.
- Verifique o modelo do SoC. Nem todos os chips são iguais. Uma câmera usando um SoC de ponta com um DSP de áudio dedicado lidará melhor com 4K + AEC do que um chip econômico que executa tudo na CPU principal.
- Reduza a taxa de quadros, se necessário. Reduzir de 30 fps para 15 fps no stream 4K corta a carga de codificação quase pela metade. A latência de áudio melhora como resultado. Esta é uma otimização comum em práticas de ajuste de desempenho de codificação de vídeo 10.
| Condição de Carga do SoC | Latência Típica do AEC | Impacto na Conversa |
|---|---|---|
| Stream 1080p, baixo uso de CPU | 20–30 ms | Nenhum atraso perceptível |
| Stream 4K, uso moderado de CPU | 30–40 ms | Ainda natural |
| Stream 4K + análise de IA | 40–70 ms | Atraso leve, ainda utilizável |
| 4K + IA + jitter de rede alto | 70–120 ms+ | O atraso se torna perceptível, pode precisar de otimização |
Eu sempre testo o atraso total de áudio de ida e volta durante a fase piloto. Eu toco um som de clique agudo perto da câmera e meço quanto tempo leva para ouvi-lo no aplicativo remoto. Se o número for inferior a 200 ms de ida e volta, o sistema está pronto para conversas reais. Se for superior a 300 ms, algo precisa mudar — seja a resolução do stream, o caminho da rede ou a configuração do SoC.
Conclusão
O AEC em câmeras PTZ lida bem com o eco em ambientes barulhentos, mas a qualidade de áudio no mundo real depende do desempenho do ANS, design mecânico, estabilidade da rede e testes de campo adequados antes da implantação.
1. Explica como os filtros adaptativos removem dinamicamente os sinais de eco. ︎↩︎ 2. Detalhes dos algoritmos LMS/NLMS usados em sistemas de cancelamento de eco. ︎↩︎ 3. Discute eco residual e métodos de processamento não linear. ︎↩︎ 4. Visão geral da redução de ruído no domínio da frequência e fluxos de trabalho de AEC. ︎↩︎ 5. Pesquisa sobre desafios de sobreposição de frequência no processamento acústico. ︎↩︎ 6. Noções básicas de filtragem passa-altas para remover ruído de baixa frequência. ︎↩︎ 7. Explica padrões de microfone direcionais como captação cardióide. ︎↩︎ 8. Introdução aos padrões de compressão de vídeo usados em SoCs. ︎↩︎ 9. Estudo sobre o desempenho do cancelamento de eco e o comportamento da latência. ︎↩︎ 10. Abrange técnicas de otimização de sistemas para processamento de áudio/vídeo. ︎↩︎