
J'ai testé des dizaines de caméras PTZ avec AEC intégré sur des chantiers, des toits venteux et au bord de routes passantes. Les résultats surprennent toujours.
L'AEC des caméras PTZ chinoises peut réduire l'écho de l'extrémité distante à un niveau acceptable dans la plupart des environnements bruyants. Mais l'AEC seul ne supprime pas le bruit de fond. Ce travail appartient au module ANS. Dans les scènes à fort bruit comme les chantiers ou le vent fort, la suppression de l'écho fonctionne toujours, mais le bruit ambiant restant ne disparaîtra pas complètement, et la qualité de la voix peut sembler compressée ou étroite.
 Performance de l'annulation d'écho AEC dans les environnements de caméras PTZ bruyants
Performance de l'annulation d'écho AEC dans les environnements de caméras PTZ bruyants
Avant de vous présenter chaque partie, je veux décomposer les quatre questions que j'entends le plus souvent de la part des intégrateurs comme David Miller. Il s'agit des boucles de rétroaction, du bruit du moteur, des sons basse fréquence et de la latence de traitement. Chacun de ces éléments est important lorsque vous déployez des caméras PTZ avec audio bidirectionnel dans le monde réel. Je vais les passer en revue une par une.
Table des matières
Comment l'algorithme AEC empêche-t-il les boucles de rétroaction lors d'une conversation bidirectionnelle via une application mobile ?
J'ai une fois perdu un projet parce que le client entendait sa propre voix revenir par le haut-parleur de la PTZ lors d'une démonstration en direct. Cela m'a appris une leçon difficile sur les boucles de rétroaction.
L'algorithme AEC utilise des techniques de filtrage adaptatif dans l'annulation d'écho acoustique 1 pour capturer la sortie du haut-parleur comme signal de référence. Il soustrait ensuite cette référence de l'entrée du microphone en temps réel. Cela empêche la voix de l'extrémité distante de revenir en boucle par le cycle haut-parleur et microphone, ce qui provoquerait autrement un écho ou un sifflement.
 Prévention des boucles de rétroaction par l'algorithme AEC dans l'audio bidirectionnel PTZ
Prévention des boucles de rétroaction par l'algorithme AEC dans l'audio bidirectionnel PTZ
Comment le filtrage adaptatif fonctionne réellement
Le cœur de l'AEC est un filtre numérique qui apprend le chemin acoustique entre le haut-parleur et le microphone. Dans une caméra PTZ, le haut-parleur diffuse la voix de la personne distante. Le microphone capte cette voix après qu'elle ait rebondi sur les murs, le boîtier de la caméra et les surfaces environnantes. L'algorithme AEC prend la sortie originale du haut-parleur et l'utilise comme référence. Il construit ensuite un modèle de la façon dont ce son change lorsqu'il traverse l'environnement. Une fois qu'il a un bon modèle, il soustrait l'écho prédit du signal du microphone. Ce qui reste est uniquement la voix de la personne locale. Les systèmes modernes s'appuient souvent sur des algorithmes de filtrage numérique adaptatif tels que LMS et NLMS 2 pour mettre à jour continuellement ce modèle.
Pourquoi les boucles de rétroaction se produisent encore
En pratique, ce processus n'est pas parfait. Voici les principales raisons pour lesquelles des boucles de rétroaction peuvent encore se produire :
- Volume du haut-parleur trop élevé. Lorsque le volume de sortie est au maximum, l'énergie sonore surcharge le microphone. L'algorithme ne peut pas soustraire ce qu'il ne peut pas modéliser proprement.
- Mauvaise isolation physique. Si le haut-parleur et le microphone se trouvent dans le même petit boîtier PTZ sans amortissement en caoutchouc, le son se propage à travers le corps en métal ou en plastique. Cet écho structurel est très rapide et très fort. Le filtre AEC ne peut souvent pas le gérer.
- Décalages du délai réseau. Sur une application mobile 4G, la gigue du réseau peut modifier le moment entre le signal de référence et l'écho réel. Si le délai dépasse la fenêtre tampon AEC, l'algorithme perd le verrouillage de l'écho.
Ce que vous pouvez faire à ce sujet
Je dis toujours à mes clients de commencer par réduire le volume du haut-parleur de 30%. Cette seule étape résout la plupart des problèmes de Larsen. Si cela ne suffit pas, passez le firmware en mode AEC duplex intégral avec NLP activé. NLP signifie traitement non linéaire dans les systèmes d'annulation d'écho 3. Il capte l'écho résiduel que le filtre linéaire manque.
| Cause du Larsen | Fixer | Résultat attendu |
|---|---|---|
| Volume du haut-parleur trop élevé | Réduire la sortie de 30% | L'écho tombe en dessous du niveau audible |
| Mauvaise isolation physique | Utiliser un haut-parleur + micro externe avec 1m d'espacement | Supprime 90% d'écho structurel |
| Gigue réseau sur 4G | Activer le tampon de gigue dans le firmware | L'AEC reste verrouillé sur le timing de l'écho |
Pour les intégrateurs qui déploient dans des zones reculées avec une 4G instable, je recommande de tester l'AEC avec un véritable appel d'application mobile avant de finaliser l'installation. Ne vous fiez pas à un test dans un bureau silencieux. Le terrain est toujours différent.
Puis-je avoir une conversation claire pendant que le moteur PTZ effectue un panoramique ou une inclinaison ?
J'ai participé à des appels où la PTZ a commencé à bouger et l'autre personne a dit : “ Qu'est-ce que ce bruit de grincement ? ” C'est le moteur. Et c'est un vrai problème pour l'audio bidirectionnel.
Oui, vous pouvez tenir une conversation pendant que le moteur PTZ bouge, mais le bruit du moteur sera capté par le microphone. L'AEC ne le supprimera pas car la vibration du moteur n'est pas un écho. Vous avez besoin de l'ANS et d'un bon amortissement mécanique à l'intérieur de la caméra pour maintenir le bruit du moteur suffisamment bas pour une parole claire.
 Bruit du moteur PTZ pendant une conversation audio bidirectionnelle
Bruit du moteur PTZ pendant une conversation audio bidirectionnelle
Pourquoi le bruit du moteur est différent de l'écho
L'AEC est conçu pour annuler une chose spécifique : le son qui provenait du haut-parleur et qui revenait dans le microphone. Le bruit du moteur n'est pas une sortie de haut-parleur. C'est une nouvelle source sonore. L'algorithme AEC l'ignore donc complètement. Le module ANS est celui qui tente de réduire ce type de bruit mécanique constant. Mais l'ANS fonctionne mieux sur des sons constants et prévisibles. Le bruit du moteur PTZ change de hauteur et de volume lorsque la caméra accélère, ralentit ou change de direction. Cela rend plus difficile le suivi et la suppression par l'ANS.
Le rôle de la conception mécanique
Chez Loyalty-Secu, nous accordons une grande attention à la conception mécanique interne de nos caméras PTZ. Voici ce qui compte :
- Supports moteur en caoutchouc. Ceux-ci absorbent les vibrations avant qu'elles n'atteignent la cavité du microphone.
- Chambre de microphone scellée. Une chambre acoustique séparée pour le microphone réduit le bruit du moteur transmis par l'air.
- Mouvement à courroie par rapport à mouvement à engrenages. Les mécanismes PTZ à courroie sont plus silencieux que les entraînements directs à engrenages. Mais ils coûtent plus cher et s'usent plus vite.
Ce à quoi s'attendre en pratique
D'après mon expérience, une caméra PTZ bien construite produira un bruit de moteur d'environ 35-45 dB au microphone. La parole humaine à 1 mètre est d'environ 60-65 dB. Le rapport signal/bruit est donc toujours exploitable. L'auditeur distant entendra un léger bourdonnement ou vrombissement lors du panoramique, mais la parole reste claire. Si le bruit du moteur est supérieur à 50 dB, la clarté de la parole diminue rapidement.
| Niveau de bruit du moteur | Clarté de la parole | Recommandation |
|---|---|---|
| En dessous de 35 dB | Excellent — moteur à peine audible | Aucune action n'est nécessaire |
| 35–45 dB | Bon — léger bourdonnement pendant le mouvement | Acceptable pour la plupart des utilisations B2B |
| 45–50 dB | Moyen — bruit perceptible, la parole reste claire | Activer le mode ANS élevé |
| Au-dessus de 50 dB | Mauvais — le moteur concurrence la parole | Utiliser un microphone externe éloigné du corps |
Si vous avez des conversations bidirectionnelles critiques pendant le mouvement PTZ, je suggère de monter un microphone de capture externe à au moins 50 cm du corps de la caméra. C'est la solution la plus simple et la plus efficace. Aucun algorithme ne peut remplacer complètement une bonne séparation physique.
Le filtre de suppression de bruit (ANS) élimine-t-il les sons constants basse fréquence comme le trafic ou les ventilateurs ?
J'ai déployé une fois un système PTZ solaire à côté d'une autoroute. Le client m'a appelé et a dit : “ J'entends mieux les camions que le garde. ” C'est là que j'ai appris les limites de l'ANS sur le bruit de basse fréquence.
L'ANS peut réduire les sons constants de basse fréquence comme le bourdonnement d'un ventilateur et le trafic lointain de 10 à 20 dB. Mais il ne peut pas les éliminer complètement. L'ANS fonctionne en estimant le spectre du bruit pendant les moments de silence, puis en le soustrayant pendant la parole. L'énergie de basse fréquence est difficile à couper sans affecter également les tons graves de la voix humaine.
 Réduction du bruit ANS pour les sons de basse fréquence dans les caméras PTZ
Réduction du bruit ANS pour les sons de basse fréquence dans les caméras PTZ
Comment l'ANS estime et soustrait le bruit
Les algorithmes ANS fonctionnent dans le domaine fréquentiel. Pendant les moments où personne ne parle, l'algorithme capture un “ profil de bruit ”. Ce profil indique au système à quoi ressemblent les sons de fond. Lorsque quelqu'un commence à parler, l'algorithme soustrait ce profil de bruit du signal complet. Ce qui reste devrait être principalement de la voix. Cette approche est largement utilisée dans les méthodes de réduction du bruit dans le domaine fréquentiel 4 dans les systèmes DSP audio modernes.
Cela fonctionne bien pour les bruits stables et plats comme la climatisation ou un ventilateur lointain. Ces sons ont un schéma de fréquence stable. L'algorithme peut construire un modèle précis et le soustraire proprement.
Là où ANS rencontre des difficultés
Le bruit basse fréquence provenant de la circulation, des générateurs ou des machines lourdes est plus difficile à gérer. Voici pourquoi :
- Chevauchement avec la voix. La voix humaine masculine a des fréquences fondamentales comprises entre 85 et 180 Hz. Le grondement de la circulation se situe dans la plage de 50 à 250 Hz. Il y a un grand chevauchement. Si l'ANS coupe trop agressivement dans cette plage, la voix du locuteur semble mince et non naturelle. C'est une limitation bien connue dans l'analyse du chevauchement fréquentiel du signal de parole 5.
- Changements d'amplitude. Un camion qui passe devient plus fort puis plus faible en quelques secondes. L'ANS a besoin de temps pour mettre à jour son estimation du bruit. Pendant cette fenêtre de mise à jour, le bruit passe.
- Bruit non stationnaire. Les rafales de vent, les klaxons soudains et les bruits de construction ne sont pas constants. L'ANS n'est pas conçu pour gérer des rafales soudaines. Il est conçu pour le bruit en régime permanent.
Conseils pratiques pour les sites bruyants
Pour les sites avec un bruit basse fréquence important, je recommande ce qui suit :
- Utilisez un filtre passe-haut dans les systèmes de traitement audio à 150 Hz si le firmware le permet 6. Cela coupe le grondement le plus profond sans nuire à la plupart des voix.
- Placez le microphone loin des surfaces vibrantes comme les poteaux métalliques, les clôtures ou les boîtiers de générateur.
- Si le site est extrêmement bruyant, envisagez un motif de captation de microphone directionnel (cardioïde) 7 au lieu de celui intégré omnidirectionnel.
Lors de mes tests, l'ANS combiné à un filtre passe-haut réduit le bruit de fond basse fréquence d'environ 15 à 20 dB. C'est suffisant pour rendre la parole compréhensible, mais l'auditeur distant entendra toujours qu'il n'est pas dans une pièce calme. Gérez les attentes de votre client dès le début. Aucune caméra PTZ ne fera ressembler une autoroute à un bureau.
Quelle est la latence de traitement de l'AEC lors d'un flux vidéo 4K haute résolution ?
Un client m'a demandé si l'exécution de la vidéo 4K ralentirait l'AEC. C'est une question légitime. Les deux tâches partagent le même processeur à l'intérieur de la caméra.
La latence de traitement AEC dans la plupart des caméras PTZ est comprise entre 20 et 40 ms. L'exécution d'un flux vidéo 4K n'augmente pas directement la latence AEC car l'audio et la vidéo sont traités sur des pipelines séparés à l'intérieur du SoC. Mais si le SoC est fortement sollicité par l'encodage 4K, le pipeline audio peut connaître des retards occasionnels, ajoutant 10 à 30 ms de latence supplémentaire dans les pires cas.
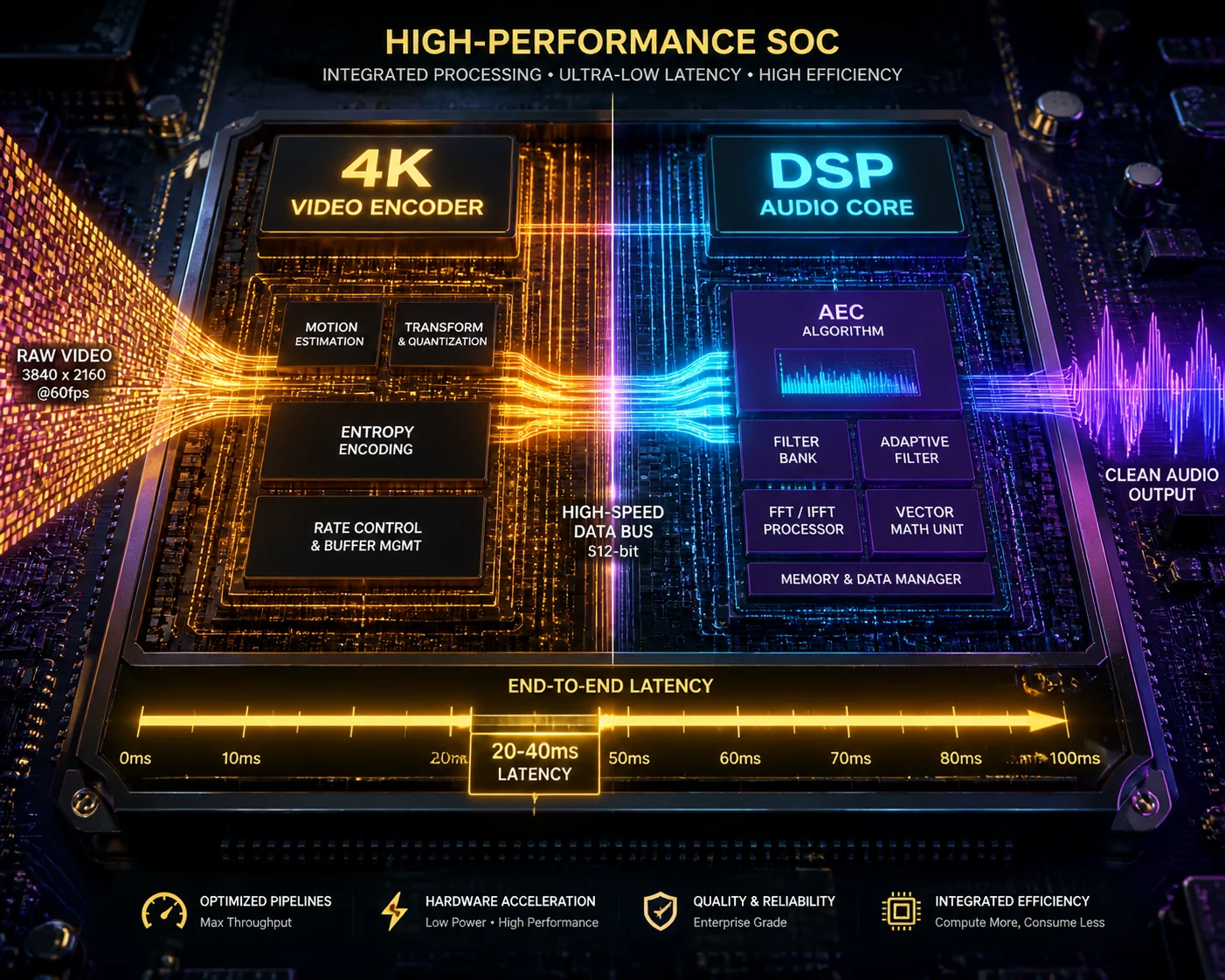 Latence de traitement AEC lors du flux vidéo 4K dans une caméra PTZ
Latence de traitement AEC lors du flux vidéo 4K dans une caméra PTZ
Comment l'audio et la vidéo partagent le SoC
Les caméras PTZ modernes utilisent un System-on-Chip (SoC) qui gère l'encodage vidéo, le traitement d'image, la transmission réseau et le traitement audio simultanément. À l'intérieur du SoC, ces tâches s'exécutent sur différents blocs matériels. L'encodage vidéo utilise un encodeur matériel dédié comme Normes de compression vidéo H.264 et H.265 8. Le traitement audio, y compris l'AEC, s'exécute sur un cœur DSP ou le CPU principal.
En théorie, ils n'interfèrent pas l'un avec l'autre. En pratique, ils partagent la bande passante mémoire et les ressources du bus. Lorsque l'encodeur vidéo travaille dur sur un flux 4K à 25 ips, il utilise beaucoup de bande passante mémoire. Si le DSP audio doit accéder à la mémoire en même temps, il peut devoir attendre. Cette attente ajoute quelques millisecondes de latence.
Ce que la latence signifie pour l'audio bidirectionnel
Pour un appel téléphonique normal, les gens commencent à remarquer un délai à environ 150 ms en aller simple. En dessous de 100 ms, la conversation semble naturelle. L'AEC lui-même ajoute 20 à 40 ms. La transmission réseau sur la 4G ajoute encore 50 à 150 ms. L'encodage vidéo n'ajoute rien directement au chemin audio, mais si la congestion du SoC ajoute 10 à 30 ms supplémentaires, le total peut approcher les 200 ms. À ce stade, les deux parties commencent à se parler par-dessus l'autre car le délai semble non naturel. Ces seuils correspondent aux conclusions courantes des études sur la latence des communications vocales en temps réel 9.
Comment maintenir une faible latence
Voici les étapes que je suis lors de la configuration d'une PTZ 4K avec audio bidirectionnel :
- Utilisez un sous-flux pour les sessions audio liées. De nombreuses caméras PTZ peuvent envoyer un sous-flux de résolution inférieure à côté du flux principal 4K. Si votre application mobile utilise le sous-flux pour la session audio bidirectionnelle, la charge du SoC diminue et la latence audio reste faible.
- Vérifiez le modèle de SoC. Tous les puces ne sont pas égales. Une caméra utilisant un SoC haut de gamme avec un DSP audio dédié gérera mieux la 4K + AEC qu'une puce économique qui exécute tout sur le CPU principal.
- Réduisez la fréquence d'images si nécessaire. La réduction du flux 4K de 30 ips à 15 ips réduit la charge d'encodage de moitié. La latence audio s'améliore en conséquence. Il s'agit d'une optimisation courante dans les pratiques d'optimisation des performances d'encodage vidéo 10.
| État de charge du SoC | Latence AEC typique | Impact sur la conversation |
|---|---|---|
| Flux 1080p, faible utilisation du processeur | 20–30 ms | Aucun délai perceptible |
| Flux 4K, utilisation modérée du processeur | 30–40 ms | Toujours naturel |
| Flux 4K + analyse IA | 40–70 ms | Léger délai, toujours utilisable |
| 4K + IA + gigue réseau élevée | 70–120 ms+ | Le délai devient perceptible, une optimisation peut être nécessaire |
Je teste toujours le délai audio total aller-retour pendant la phase pilote. Je joue un son de clic net près de la caméra et je mesure le temps nécessaire pour l'entendre sur l'application distante. Si le nombre est inférieur à 200 ms aller-retour, le système est prêt pour des conversations réelles. S'il dépasse 300 ms, quelque chose doit changer — soit la résolution du flux, le chemin réseau, soit la configuration du SoC.
Conclusion
L'AEC dans les caméras PTZ gère bien l'écho dans les environnements bruyants, mais la qualité audio réelle dépend des performances de l'ANS, de la conception mécanique, de la stabilité du réseau et de tests sur le terrain appropriés avant le déploiement.
1. Explique comment les filtres adaptatifs suppriment dynamiquement les signaux d'écho. ︎↩︎ 2. Détails des algorithmes LMS/NLMS utilisés dans les systèmes d'annulation d'écho. ︎↩︎ 3. Discute de l'écho résiduel et des méthodes de traitement non linéaire. ︎↩︎ 4. Aperçu de la réduction du bruit dans le domaine fréquentiel et des flux de travail AEC. ︎↩︎ 5. Recherche sur les défis du chevauchement fréquentiel dans le traitement acoustique. ︎↩︎ 6. Bases du filtrage passe-haut pour éliminer le bruit basse fréquence. ︎↩︎ 7. Explique les directivités des microphones comme la directivité cardioïde. ︎↩︎ 8. Introduction aux normes de compression vidéo utilisées dans les SoC. ︎↩︎ 9. Étude sur les performances d'annulation d'écho et le comportement de latence. ︎↩︎ 10. Couvre les techniques d'optimisation du système pour le traitement audio/vidéo. ︎↩︎