
He probado docenas de cámaras PTZ con AEC incorporado en sitios de construcción, tejados con viento y bordes de carreteras concurridos. Los resultados siempre sorprenden a la gente.
El AEC en las cámaras PTZ chinas puede reducir el eco de la parte lejana a un nivel aceptable en la mayoría de los entornos ruidosos. Pero el AEC por sí solo no elimina el ruido de fondo. Ese trabajo pertenece al módulo ANS. En escenas de alto ruido como sitios de construcción o viento fuerte, la supresión de eco todavía funciona, pero el ruido ambiental restante no desaparecerá por completo y la calidad de la voz puede sonar comprimida o limitada.
 Rendimiento de la cancelación de eco AEC en entornos de cámaras PTZ ruidosos
Rendimiento de la cancelación de eco AEC en entornos de cámaras PTZ ruidosos
Antes de repasar cada parte, quiero desglosar las cuatro preguntas que más escucho de los integradores como David Miller. Estas son sobre bucles de retroalimentación, ruido del motor, sonidos de baja frecuencia y latencia de procesamiento. Cada una de ellas es importante cuando se implementan cámaras PTZ con audio bidireccional en el mundo real. Permítanme repasarlas una por una.
Índice
¿Cómo previene el algoritmo AEC los bucles de retroalimentación durante una conversación bidireccional en una aplicación móvil?
Una vez perdí un proyecto porque el cliente escuchó su propia voz rebotando a través del altavoz de la PTZ durante una demostración en vivo. Eso me enseñó una dura lección sobre los bucles de retroalimentación.
El algoritmo AEC utiliza técnicas de filtrado adaptativo en la cancelación de eco acústico 1 para capturar la salida del altavoz como una señal de referencia. Luego, resta esa referencia de la entrada del micrófono en tiempo real. Esto evita que la voz de la parte lejana se repita a través del ciclo de altavoz y micrófono, lo que de lo contrario causaría eco o aullidos.
 Prevención de bucles de retroalimentación del algoritmo AEC en audio bidireccional PTZ
Prevención de bucles de retroalimentación del algoritmo AEC en audio bidireccional PTZ
Cómo funciona realmente el filtrado adaptativo
El núcleo del AEC es un filtro digital que aprende la ruta acústica entre el altavoz y el micrófono. En una cámara PTZ, el altavoz reproduce la voz de la persona remota. El micrófono capta esa voz después de que rebota en las paredes, la carcasa de la cámara y las superficies cercanas. El algoritmo AEC toma la salida original del altavoz y la utiliza como referencia. Luego, construye un modelo de cómo ese sonido cambia a medida que viaja a través del entorno. Una vez que tiene un buen modelo, resta el eco predicho de la señal del micrófono. Lo que queda es solo la voz de la persona local. Los sistemas modernos a menudo dependen de algoritmos de filtro digital adaptativo como LMS y NLMS 2 para actualizar continuamente este modelo.
Por qué todavía ocurren bucles de retroalimentación
En la práctica, este proceso no es perfecto. Aquí están las principales razones por las que los bucles de retroalimentación aún pueden ocurrir:
- Volumen del altavoz demasiado alto. Cuando el volumen de salida está al máximo, la energía del sonido sobrecarga el micrófono. El algoritmo no puede restar lo que no puede modelar limpiamente.
- Mal aislamiento físico. Si el altavoz y el micrófono se encuentran dentro de la misma carcasa PTZ pequeña sin amortiguación de goma, el sonido viaja a través del cuerpo metálico o de plástico. Este eco estructural es muy rápido y muy fuerte. El filtro AEC a menudo no puede manejarlo.
- Cambios en el retardo de la red. En una aplicación móvil 4G, la fluctuación de la red puede cambiar el tiempo entre la señal de referencia y el eco real. Si el retardo salta fuera de la ventana del búfer AEC, el algoritmo pierde el bloqueo del eco.
Qué puedes hacer al respecto
Siempre les digo a mis clientes que empiecen por bajar el volumen del altavoz un 30%. Este único paso soluciona la mayoría de los problemas de retroalimentación. Si eso no es suficiente, cambie el firmware al modo AEC dúplex completo con NLP habilitado. NLP significa procesamiento no lineal en sistemas de cancelación de eco 3. Captura el eco residual que el filtro lineal se pierde.
| Causa de la retroalimentación | Fijar | Resultado esperado |
|---|---|---|
| Volumen del altavoz demasiado alto | Reducir la salida en un 30% | El eco cae por debajo del nivel audible |
| Mal aislamiento físico | Usar altavoz + micrófono externos con 1m de separación | Elimina el 90% del eco estructural |
| Fluctuación de red en 4G | Habilitar el búfer de fluctuación en el firmware | El AEC permanece bloqueado en la temporización del eco |
Para los integradores que implementan en áreas remotas con 4G inestable, recomiendo probar el AEC con una llamada real de una aplicación móvil antes de finalizar la instalación. No confíe en una prueba en una oficina silenciosa. El campo siempre es diferente.
¿Puedo mantener una conversación clara mientras el motor de la PTZ se desplaza horizontal o verticalmente?
He estado en llamadas donde el PTZ comenzó a moverse y la otra persona dijo: “¿Qué es ese ruido de rozamiento?”. Ese es el motor. Y es un problema real para el audio bidireccional.
Sí, puedes mantener una conversación mientras el motor del PTZ se mueve, pero el ruido del motor será captado por el micrófono. El AEC no lo eliminará porque la vibración del motor no es eco. Necesitas ANS y una buena amortiguación mecánica dentro de la cámara para mantener el ruido del motor lo suficientemente bajo para un habla clara.
 Ruido del motor PTZ durante la conversación de audio bidireccional
Ruido del motor PTZ durante la conversación de audio bidireccional
Por qué el ruido del motor es diferente del eco
El AEC está diseñado para cancelar una cosa específica: el sonido que provino del altavoz y rebotó hacia el micrófono. El ruido del motor no es una salida del altavoz. Es una nueva fuente de sonido. Por lo tanto, el algoritmo AEC lo ignora por completo. El módulo ANS es el que intenta reducir este tipo de ruido mecánico constante. Pero el ANS funciona mejor con sonidos constantes y predecibles. El ruido del motor PTZ cambia de tono y volumen a medida que la cámara acelera, desacelera o cambia de dirección. Esto hace que sea más difícil para el ANS rastrear y suprimir.
El papel del diseño mecánico
En Loyalty-Secu, prestamos mucha atención al diseño mecánico interno de nuestras cámaras PTZ. Esto es lo que importa:
- Soportes de motor de goma. Estos absorben la vibración antes de que llegue a la cavidad del micrófono.
- Cámara de micrófono sellada. Una cámara acústica separada para el micrófono reduce el ruido del motor transmitido por el aire.
- Movimiento accionado por correa vs. accionado por engranajes. Los mecanismos PTZ accionados por correa son más silenciosos que las transmisiones directas por engranajes. Pero cuestan más y se desgastan más rápido.
Qué esperar en la práctica
En mi experiencia, una cámara PTZ bien construida producirá ruido de motor de alrededor de 35-45 dB en el micrófono. El habla humana a 1 metro es de aproximadamente 60-65 dB. Por lo tanto, la relación señal/ruido sigue siendo manejable. El oyente remoto escuchará un zumbido o silbido débil durante el paneo, pero el habla permanece clara. Si el ruido del motor es superior a 50 dB, la claridad del habla se reduce rápidamente.
| Nivel de ruido del motor | Claridad del habla | Recomendación |
|---|---|---|
| Por debajo de 35 dB | Excelente — motor apenas audible | No es necesario |
| 35–45 dB | Bueno — zumbido leve durante el movimiento | Aceptable para la mayoría de usos B2B |
| 45–50 dB | Regular — ruido notable, el habla sigue siendo clara | Habilitar modo ANS alto |
| Por encima de 50 dB | Pobre — el motor compite con el habla | Usar micrófono externo alejado del cuerpo |
Si va a mantener conversaciones bidireccionales críticas durante el movimiento PTZ, sugiero montar un micrófono de captación externo a una distancia mínima de 50 cm del cuerpo de la cámara. Esta es la solución más simple y efectiva. Ningún algoritmo puede reemplazar completamente una buena separación física.
¿Filtra el Supresor de Ruido (ANS) los sonidos constantes de baja frecuencia como el tráfico o los ventiladores?
Una vez desplegué un sistema PTZ solar junto a una autopista. El cliente me llamó y dijo: “Oigo más los camiones que al guardia”. Ahí fue cuando aprendí los límites del ANS en el ruido de baja frecuencia.
El ANS puede reducir los sonidos constantes de baja frecuencia, como el zumbido del ventilador y el tráfico distante, en 10-20 dB. Pero no puede eliminarlos por completo. El ANS funciona estimando el espectro de ruido durante los momentos de silencio y luego restándolo durante el habla. La energía de baja frecuencia es difícil de cortar sin afectar también los tonos bajos de la voz humana.
 Supresión de ruido ANS para sonidos de baja frecuencia en cámaras PTZ
Supresión de ruido ANS para sonidos de baja frecuencia en cámaras PTZ
Cómo el ANS estima y restaura el ruido
Los algoritmos ANS operan en el dominio de la frecuencia. Durante los momentos en que nadie habla, el algoritmo captura un “perfil de ruido”. Este perfil le dice al sistema cómo suena el fondo. Cuando alguien empieza a hablar, el algoritmo resta este perfil de ruido de la señal completa. Lo que queda debería ser principalmente voz. Este enfoque se utiliza ampliamente en métodos de reducción de ruido en el dominio de la frecuencia 4 en sistemas modernos de DSP de audio.
Esto funciona bien para ruidos constantes y planos como el aire acondicionado o un ventilador distante. Estos sonidos tienen un patrón de frecuencia estable. El algoritmo puede construir un modelo preciso y restarlo limpiamente.
Dónde ANS tiene dificultades
El ruido de baja frecuencia del tráfico, generadores o maquinaria pesada es más difícil de manejar. He aquí por qué:
- Superposición con la voz. La voz humana masculina tiene frecuencias fundamentales entre 85 y 180 Hz. El ruido del tráfico se sitúa en el rango de 50-250 Hz. Hay una gran superposición. Si ANS corta de forma demasiado agresiva en este rango, la voz del hablante suena delgada y poco natural. Esta es una limitación bien conocida en análisis de superposición de frecuencias de señales de voz 5.
- Cambios de amplitud. Un camión que pasa se vuelve más ruidoso y luego más suave en unos pocos segundos. ANS necesita tiempo para actualizar su estimación de ruido. Durante esa ventana de actualización, el ruido se filtra.
- Ruido no estacionario. Las ráfagas de viento, los bocinazos repentinos y los golpes de construcción no son constantes. ANS no está diseñado para manejar ráfagas repentinas. Está construido para ruido en estado estacionario.
Consejos prácticos para sitios ruidosos
Para sitios con ruido intenso de baja frecuencia, recomiendo lo siguiente:
- Utilice un filtro paso alto en sistemas de procesamiento de audio a 150 Hz si el firmware lo permite 6. Esto corta el retumbar más profundo sin dañar la mayor parte del habla.
- Coloque el micrófono lejos de superficies vibratorias como postes metálicos, vallas o carcasas de generadores.
- Si el sitio es extremadamente ruidoso, considere un patrón de captación de micrófono direccional (cardioide) 7 en lugar de la incorporada omnidireccional.
En mis pruebas, ANS combinado con un filtro de paso alto reduce el ruido de fondo de baja frecuencia en unos 15-20 dB. Eso es suficiente para que el habla sea comprensible, pero el oyente remoto aún escuchará que no está en una habitación tranquila. Establezca las expectativas con su cliente desde el principio. Ninguna cámara PTZ hará que una autopista suene como una oficina.
¿Cuál es la latencia de procesamiento del AEC durante una transmisión de video 4K de alta resolución?
Un cliente me preguntó si ejecutar video 4K ralentizaría el AEC. Es una pregunta justa. Ambas tareas comparten el mismo procesador dentro de la cámara.
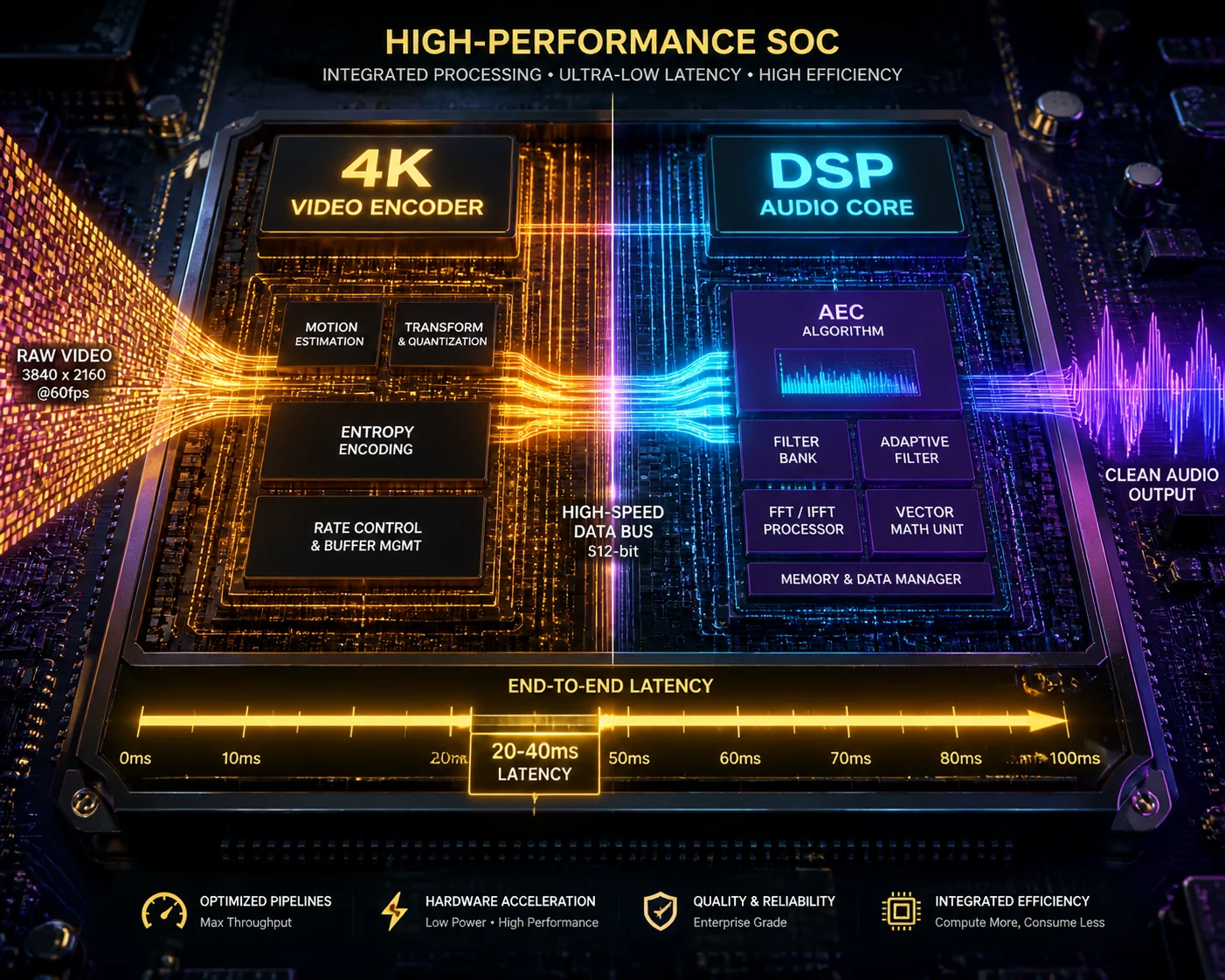
La latencia de procesamiento AEC en la mayoría de las cámaras PTZ está entre 20 y 40 ms. La transmisión de video 4K no aumenta directamente la latencia AEC porque el audio y el video se procesan en tuberías separadas dentro del SoC. Pero si el SoC está bajo una carga pesada de codificación 4K, la tubería de audio puede experimentar retrasos ocasionales, agregando 10-30 ms de latencia adicional en los peores casos.
 Latencia de procesamiento AEC durante la transmisión de video 4K en cámara PTZ
Latencia de procesamiento AEC durante la transmisión de video 4K en cámara PTZ
Cómo el audio y el video comparten el SoC
Las cámaras PTZ modernas utilizan un Sistema en Chip (SoC) que maneja la codificación de video, el procesamiento de imágenes, la transmisión de red y el procesamiento de audio a la vez. Dentro del SoC, estas tareas se ejecutan en diferentes bloques de hardware. La codificación de video utiliza un codificador de hardware dedicado como Estándares de compresión de video H.264 y H.265 8. El procesamiento de audio, incluido el AEC, se ejecuta en un núcleo DSP o en la CPU principal.
En teoría, no interfieren entre sí. En la práctica, comparten el ancho de banda de memoria y los recursos del bus. Cuando el codificador de video está trabajando duro en una transmisión 4K a 25 fps, utiliza mucho ancho de banda de memoria. Si el DSP de audio necesita acceder a la memoria al mismo tiempo, puede tener que esperar. Esta espera agrega unos pocos milisegundos de latencia.
Qué significa la latencia para el audio bidireccional
Para una llamada telefónica normal, las personas comienzan a notar el retraso alrededor de los 150 ms en una dirección. Por debajo de 100 ms, la conversación se siente natural. El AEC en sí mismo agrega 20-40 ms. La transmisión de red a través de 4G agrega otros 50-150 ms. La codificación de video no se suma directamente a la ruta de audio, pero si la congestión del SoC agrega 10-30 ms adicionales, el total puede acercarse a los 200 ms. En ese punto, ambos lados comienzan a hablar uno sobre el otro porque el retraso se siente antinatural. Estos umbrales se alinean con los hallazgos comunes en estudios de latencia de comunicación de voz en tiempo real 9.
Cómo mantener baja la latencia
Aquí están los pasos que sigo al configurar una PTZ 4K con audio bidireccional:
- Utilice una sub-corriente para sesiones vinculadas a audio. Muchas cámaras PTZ pueden enviar una sub-corriente de menor resolución junto con la corriente principal 4K. Si su aplicación móvil utiliza la sub-corriente para la sesión de audio bidireccional, la carga del SoC disminuye y la latencia del audio se mantiene baja.
- Verifique el modelo del SoC. No todos los chips son iguales. Una cámara que utiliza un SoC de gama alta con un DSP de audio dedicado manejará 4K + AEC mejor que un chip económico que ejecuta todo en la CPU principal.
- Reduzca la velocidad de fotogramas si es necesario. Reducir de 30 fps a 15 fps en la transmisión 4K reduce la carga de codificación casi a la mitad. La latencia de audio mejora como resultado. Esta es una optimización común en las prácticas de ajuste del rendimiento de codificación de video 10.
| Condición de carga del SoC | Latencia típica del AEC | Impacto en la conversación |
|---|---|---|
| Transmisión 1080p, bajo uso de CPU | 20–30 ms | Sin retraso notable |
| Transmisión 4K, uso moderado de CPU | 30–40 ms | Todavía natural |
| Transmisión 4K + análisis de IA | 40–70 ms | Retraso leve, todavía utilizable |
| 4K + IA + fluctuación de red alta | 70–120 ms+ | El retraso se vuelve notable, puede necesitar optimización |
Siempre pruebo el retraso total del audio de ida y vuelta durante la fase piloto. Reproduzco un sonido de clic agudo cerca de la cámara y mido cuánto tiempo tarda en escucharse en la aplicación remota. Si el número está por debajo de 200 ms de ida y vuelta, el sistema está listo para conversaciones reales. Si supera los 300 ms, algo necesita cambiar: ya sea la resolución de la transmisión, la ruta de red o la configuración del SoC.
Conclusión
El AEC en las cámaras PTZ maneja bien el eco en entornos ruidosos, pero la calidad del audio en el mundo real depende del rendimiento del ANS, el diseño mecánico, la estabilidad de la red y las pruebas de campo adecuadas antes del despliegue.
1. Explica cómo los filtros adaptativos eliminan dinámicamente las señales de eco. ︎↩︎ 2. Detalles de los algoritmos LMS/NLMS utilizados en sistemas de cancelación de eco. ︎↩︎ 3. Discute el eco residual y los métodos de procesamiento no lineal. ︎↩︎ 4. Visión general de la reducción de ruido en el dominio de la frecuencia y flujos de trabajo de AEC. ︎↩︎ 5. Investigación sobre los desafíos de la superposición de frecuencias en el procesamiento acústico. ︎↩︎ 6. Fundamentos del filtrado de paso alto para eliminar el ruido de baja frecuencia. ︎↩︎ 7. Explica los patrones de micrófono direccional como la captación cardioide. ︎↩︎ 8. Introducción a los estándares de compresión de video utilizados en SoC. ︎↩︎ 9. Estudio sobre el rendimiento de la cancelación de eco y el comportamiento de la latencia. ︎↩︎ 10. Cubre técnicas de optimización de sistemas para el procesamiento de audio/video. ︎↩︎