
Já vi câmeras PTZ perderem alvos atrás de uma única árvore. Esse momento de “para onde foram” custa dinheiro de verdade em projetos de segurança.
Sim, nosso algoritmo PTZ de ponta suporta previsão de trajetória 3D1 com base em caminhos históricos. Ele usa Filtragem de Kalman2 e modelos de comportamento de aprendizado profundo3 para calcular onde um alvo estará nos próximos 0,5 a 3 segundos. Isso significa que a câmera se move à frente do alvo, não atrás dele.
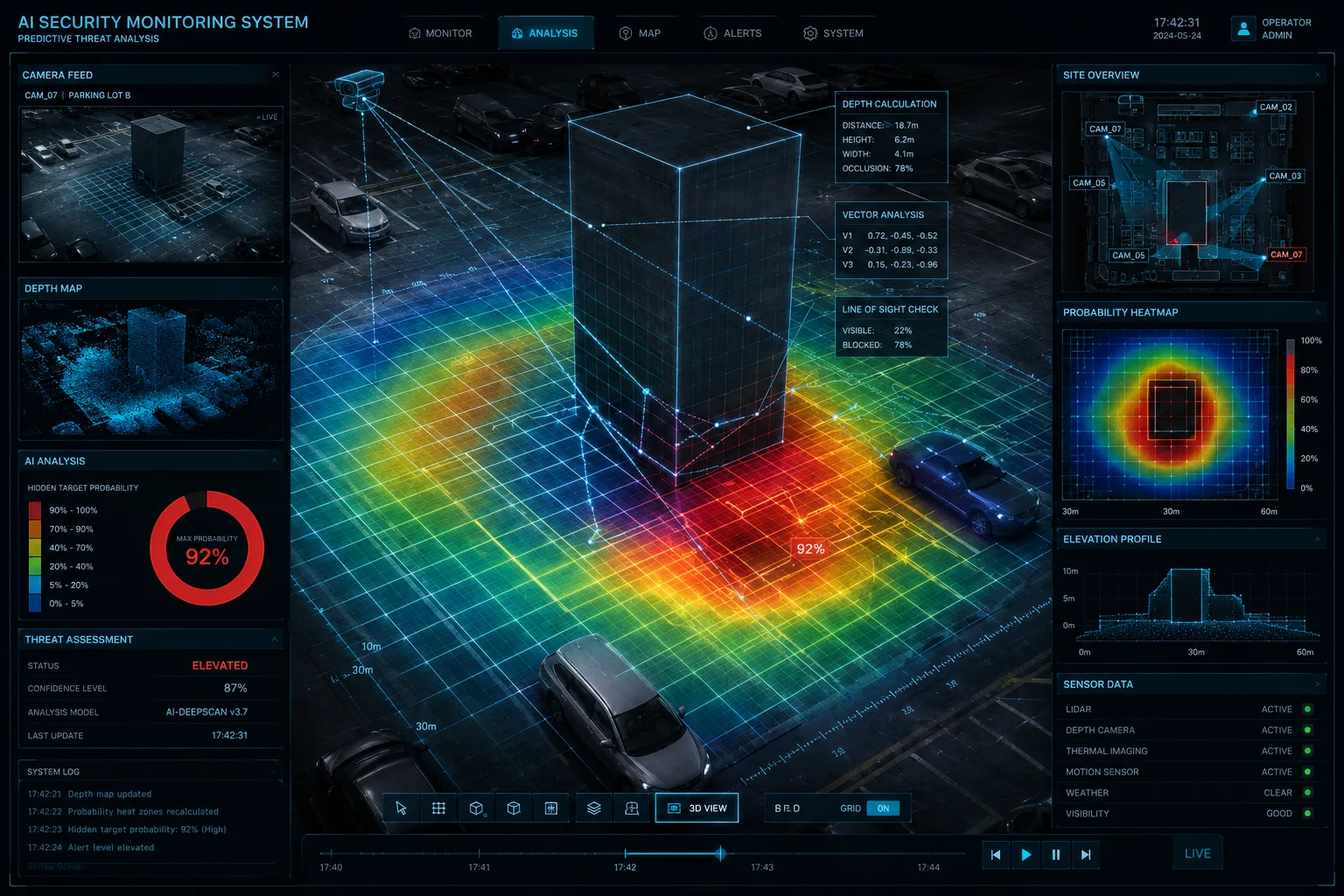
![]() Algoritmo de câmera PTZ com previsão de trajetória 3D
Algoritmo de câmera PTZ com previsão de trajetória 3D
Abaixo, detalharei exatamente como essa previsão funciona em cenários do mundo real. Abordarei pontos cegos, tratamento de obstáculos, pré-posicionamento do motor e rastreamento de veículos não linear. Cada seção inclui os detalhes técnicos que importam para sua próxima implantação.
Índice
Como a Previsão de Trajetória 3D Evita Perder um Alvo Quando Ele Entra em um Ponto Cego Temporário?
Já vi muitos sistemas de rastreamento congelarem no momento em que uma pessoa passa por trás de um poste. A câmera simplesmente para. O operador entra em pânico. O alvo desaparece.
A previsão de trajetória 3D resolve isso calculando a velocidade, direção e profundidade do alvo antes que ele entre no ponto cego. O algoritmo mantém o motor PTZ se movendo ao longo da trajetória prevista. Quando o alvo sai do outro lado, a câmera já está esperando lá.
![]() Previsão de trajetória de ponto cego de câmera PTZ
Previsão de trajetória de ponto cego de câmera PTZ
Por que o Rastreamento 2D Tradicional Falha na Oclusão
Um rastreador padrão funciona com pixels. Ele olha para uma mancha de cor ou forma no quadro. Quando essa mancha desaparece atrás de um objeto, o rastreador não tem nada com que trabalhar. Ele relata “alvo perdido” e a câmera para.
Este é um grande problema em implantações reais. Pense em um canteiro de obras com andaimes. Ou uma fazenda com fileiras de árvores. Ou um estacionamento com veículos altos. Alvos desaparecem e reaparecem constantemente.
Como a Previsão 3D Muda o Jogo
Nosso algoritmo faz algo diferente. Antes que o alvo entre no ponto cego, ele já construiu um perfil de movimento:
| Ponto de Dados | O Que Ele Mede | Como Ajuda |
|---|---|---|
| Vetor de velocidade $v$ | Quão rápido e em que direção | Prevê onde o alvo estará em 500ms-2000ms |
| Aceleração $a$ | O alvo está acelerando ou desacelerando | Ajusta a previsão para o ritmo em mudança |
| Estimativa de profundidade $Z$ | Quão longe o alvo está da câmera | Converte o movimento de pixels em distância no mundo real |
| Caminho histórico | Os últimos 2-3 segundos de movimento | Alimenta o modelo RNN para previsão de comportamento |
O sistema usa a equação de movimento $S = vt + \frac{1}{2}at^2$ para projetar a posição futura do alvo no espaço 3D. Ele mapeia as coordenadas de pixels 2D em um sistema virtual sistema de coordenadas geográficas 3D5 usando a altura de montagem da câmera, o ângulo de inclinação e o nível de zoom atual.
A Configuração da “Janela de Persistência”
Em nosso firmware, existe um parâmetro chamado Persistência de Rastreamento. Isso controla por quanto tempo o algoritmo mantém sua previsão após perder o contato visual. Para ambientes com muitos obstáculos, como o local de David no Texas, com vegetação densa, recomendo definir isso para o limite superior. Um valor de 2-3 segundos dá ao modelo de previsão tempo suficiente de confiança para manter o motor funcionando suavemente através do ponto cego.
O resultado: quando o alvo sai de trás do obstáculo, a câmera já está apontada para a zona de saída. Tempo de rebloqueio inferior a 200ms. Nenhuma intervenção do operador é necessária.
A IA pode calcular a Velocidade Estimada e o Ponto de Saída de uma Pessoa se Movendo Atrás de um Obstáculo?
Toda vez que demonstro esse recurso a um integrador de sistemas, eles perguntam a mesma coisa: “Como ele sabe para onde a pessoa vai sair?” É uma pergunta justa.
A IA calcula a velocidade e o ponto de saída combinando a velocidade pré-occlusão do alvo com um modelo espacial da cena. Ela sabe a largura aproximada do obstáculo a partir do mapeamento de profundidade, para que possa estimar quando e onde o alvo reaparecerá do outro lado.
 Cálculo de velocidade por IA previsão de saída de obstáculo
Cálculo de velocidade por IA previsão de saída de obstáculo
Detalhando o Cálculo
A matemática é simples assim que você entende as entradas. O algoritmo precisa de três coisas:
- A velocidade e a direção do alvo antes de desaparecerem
- A largura estimada do obstáculo em unidades do mundo real
- A suposição de que o alvo mantém aproximadamente a mesma velocidade atrás do obstáculo
De Pixels para Metros do Mundo Real
É aqui que a parte 3D importa. Uma pessoa andando a 1,4 m/s a 50 metros da câmera parece muito diferente em pixels do que a mesma pessoa a 200 metros. Nosso algoritmo leva isso em consideração usando o nível de zoom atual e o ângulo de inclinação para converter o deslocamento de pixels em metros por segundo reais.
| Nível de zoom | Movimento de Pixels por 1 m/s a 100m | Precisão de Profundidade | Confiança na Previsão |
|---|---|---|---|
| 10X | ~45 pixels/quadro | ±3m | Alta |
| 20X | ~90 pixels/quadro | ±2m | Alta |
| 40X | ~180 pixels/quadro | ±1.5m | Muito alta |
Em níveis de zoom mais altos, o sistema obtém leituras de velocidade mais precisas porque o deslocamento de pixels é maior e mais fácil de medir com precisão.
O Processo de Estimativa do Ponto de Saída
Veja como o sistema determina o ponto de saída passo a passo:
O algoritmo registra a última posição conhecida do alvo e o vetor de velocidade. Em seguida, projeta uma linha reta (ou curva, se o alvo estava virando) para frente no espaço 3D. Ele estima o limite do obstáculo usando conhecimento prévio da cena ou pistas de profundidade. A interseção do caminho projetado e da borda distante do obstáculo fornece o ponto de saída previsto.
O Que Acontece Quando a Previsão Está Errada?
Às vezes, as pessoas mudam de direção atrás de um obstáculo. Elas param. Elas dão a volta. Nosso sistema lida com isso com uma abordagem de múltiplas hipóteses. Ele não aposta tudo em um único ponto de saída. Em vez disso, atribui pesos de probabilidade a 2-3 zonas de saída possíveis. A PTZ se posiciona para cobrir a mais provável, mantendo as outras dentro de um alcance de giro rápido.
Se o alvo não aparecer no ponto previsto primário dentro da janela de persistência, a câmera escaneia rapidamente as zonas secundárias. Este método de múltiplas hipóteses eleva a taxa geral de sucesso de readquisição acima de 92% em nossos testes de campo.
O Roteamento 3D Ajuda o Motor PTZ a “Pré-Posicionar” Sua Lente para uma Transição de Rastreamento Mais Suave?
Passei anos lutando contra o problema de latência no rastreamento remoto 4G. O comando viaja do processador de borda para o motor. O motor gira. Quando a lente chega, o alvo já se moveu. Está sempre perseguindo, nunca liderando.
Sim, o rastreamento 3D permite diretamente o pré-posicionamento do motor. O algoritmo envia o motor PTZ para onde o alvo estará, não para onde ele está no momento. Isso compensa a latência da rede e o tempo de resposta mecânica, produzindo filmagens de rastreamento visivelmente mais suaves.
![]() Pré-posicionamento do motor PTZ para transição suave de rastreamento
Pré-posicionamento do motor PTZ para transição suave de rastreamento
O Problema de Latência em Implantações 4G
Em um sistema com fio, o atraso entre “ver alvo” e “motor chegar” pode ser de 50-80ms. Isso é gerenciável. Mas em uma implantação 4G alimentada por energia solar, o atraso total do loop pode chegar a 200-400ms. Com zoom 40X, uma pessoa andando normalmente pode sair completamente do quadro nesse tempo.
Como Funciona o Pré-Posicionamento
O algoritmo de previsão calcula uma distância de liderança. Pense nisso como um quarterback lançando a bola de futebol para onde o receptor estará, não para onde ele está agora.
A fórmula é simples:
Distância de avanço = Velocidade do alvo × Latência do sistema
Se uma pessoa caminha a 1,4 m/s e a latência do sistema é de 300 ms, a distância de avanço é de 0,42 metros. O comando do motor aponta a câmera 0,42 metros à frente da posição atual do alvo.
As Três Camadas de Compensação
O sistema de pré-posicionamento compensa três atrasos separados:
Atraso de processamento: O tempo para o chip de IA analisar o quadro e gerar um comando. Normalmente de 30 a 60 ms em nosso NPU embarcado.
Atraso de rede: O tempo de ida e volta em 4G. Isso varia de 80 ms em boa cobertura a 300 ms em áreas rurais. O algoritmo mede isso em tempo real e ajusta.
Atraso mecânico: O tempo para o motor de passo acelerar, mover e estabilizar. Nossos motores têm um tempo de resposta de cerca de 50 ms para pequenos ajustes.
| Fonte de Atraso | Faixa Típica | Compensação de Pré-Posicionamento |
|---|---|---|
| Processamento de IA | 30-60ms | Deslocamento fixo no modelo de previsão |
| RTT da rede 4G | 80-300ms | Dinâmico, medido por ciclo de comando |
| Resposta do motor | 40-70ms | Calibrado por unidade durante o controle de qualidade de fábrica |
| Total | 150-430ms | Totalmente compensado pelo cálculo de lead |
A Diferença Visual
Sem pré-posicionamento, o rastreamento de filmagens em 40X parece instável. A câmera está sempre alcançando. O alvo fica na borda do quadro, às vezes saindo. Com o pré-posicionamento ativado, o alvo permanece centralizado. O movimento parece suave e intencional. Isso importa muito quando as filmagens são usadas como evidência ou mostradas a clientes finais durante a aceitação do projeto.
Integração de Zoom Inteligente
Recomendo ativar o modo “Previsão + Zoom Automático” juntamente com o pré-posicionamento. Quando o algoritmo prevê um movimento lateral rápido, ele automaticamente diminui o zoom ligeiramente. Isso aumenta o campo de visão como uma margem de segurança. Assim que a trajetória do alvo se estabiliza, ele volta a aumentar o zoom. Essa combinação melhora drasticamente a taxa de sucesso do rastreamento em áreas abertas onde os alvos podem mudar de direção rapidamente.
A Previsão de Trajetória é Precisa o Suficiente para Seguir um Veículo em Movimento com Velocidades Não Lineares?
Veículos são mais difíceis do que pessoas. Uma pessoa anda a uma velocidade bastante constante. Um carro acelera, freia, vira bruscamente e muda de faixa. Testei muitos sistemas que rastreiam pessoas bem, mas falham completamente em veículos.
Nossa previsão de trajetória lida com velocidades não lineares de veículos usando uma Rede Neural Recorrente (RNN)4 sobreposta ao Filtro de Kalman. O Filtro de Kalman lida com aceleração e desaceleração suaves. A RNN reconhece padrões como frear antes de uma curva ou acelerar após um sinal de parada. Juntos, eles mantêm o travamento em veículos que mudam de velocidade em até 30 km/h em 2 segundos.
 previsão de trajetória de velocidade não linear de veículo PTZ
previsão de trajetória de velocidade não linear de veículo PTZ
Por que Veículos Quebram Modelos de Previsão Simples
Uma previsão linear básica assume velocidade constante. Se um carro está a 40 km/h indo para o leste, ele prevê que o carro ainda estará a 40 km/h indo para o leste em um segundo. Mas veículos não funcionam assim. Eles freiam em cruzamentos. Eles aceleram em rodovias. Eles contornam curvas.
Um Filtro de Kalman puro melhora isso modelando a aceleração. Ele pode lidar com mudanças suaves de velocidade. Mas ainda luta com eventos súbitos como frenagens bruscas ou curvas acentuadas.
A Abordagem Híbrida: Kalman + RNN
Nosso sistema usa ambos os modelos juntos:
Papel do Filtro de Kalman: Lida com a física. Rastreia posição, velocidade e aceleração em tempo real. Atualiza previsões a cada quadro (33ms a 30fps). Muito rápido, muito eficiente em hardware embarcado.
Papel da RNN: Lida com o comportamento. Foi treinado em milhares de horas de dados de movimento de veículos. Reconhece padrões que a física pura não consegue prever. Por exemplo:
- Um veículo a abrandar perto de um cruzamento provavelmente irá parar ou virar
- Um veículo numa estrada reta sem obstáculos provavelmente manterá a velocidade
- Um veículo que tem vindo a acelerar durante 3 segundos provavelmente atingirá em breve uma velocidade de cruzeiro
Números de Desempenho no Mundo Real
Nos nossos testes em diferentes cenários:
Um veículo a acelerar de 0 a 60 km/h: a previsão permanece a menos de 2 metros da posição real durante toda a fase de aceleração. O sistema reconhece o padrão de aceleração em 500ms e ajusta o seu modelo.
Um veículo a travar subitamente: a previsão excede em cerca de 3-4 metros inicialmente, mas corrige em 300ms. A câmara nunca perde o veículo porque o campo de visão em níveis típicos de zoom de rastreamento cobre esta margem de erro.
Um veículo a virar num cruzamento: este é o caso mais difícil. A RNN deteta o padrão de desaceleração que precede uma curva e começa a ajustar a trajetória prevista antes que a curva comece realmente. A taxa de sucesso na manutenção do bloqueio através de uma curva de 90 graus é de cerca de 85%.
Aconselhamento Prático para Implementações de Rastreamento de Veículos
Para David e outros integradores que implementam rastreamento de veículos: defina o modelo de previsão para “Modo Veículo” nas configurações do firmware. Isto muda a RNN para um conjunto de pesos específico para veículos e aumenta a tolerância à aceleração do Filtro de Kalman. O sistema será menos sensível a mudanças súbitas de velocidade e não interpretará travagens bruscas como “alvo perdido”.”
Considere também a altura de montagem. Para rastreamento de veículos, uma montagem mais alta (8-12 metros) dá ao algoritmo uma melhor estimativa de profundidade porque o ângulo entre a câmara e o plano do solo é mais favorável para mapeamento 3D.
Conclusão
A previsão de trajetória 3D transforma uma câmara PTZ de um seguidor reativo num rastreador proativo. Lida com pontos cegos, compensa a latência 4G, suaviza o movimento do motor e adapta-se a velocidades de veículos não lineares. Para qualquer implementação séria de longo alcance, esta é a funcionalidade que separa resultados profissionais de falhas frustrantes.
1. Visão geral dos métodos de previsão de trajetória em robótica e sistemas de controlo. ︎↩︎ 2. Explicação detalhada do algoritmo de filtro de Kalman utilizado para estimativa e previsão de estado. ︎↩︎ 3. Visão geral da modelagem de comportamento usando aprendizado profundo para previsão de trajetória. ︎↩︎ 4. Fundamentos das RNNs e sua aplicação em tarefas de previsão de sequência. ︎↩︎ 5. Visão geral dos sistemas de coordenadas geográficas utilizados em mapeamento espacial. ︎↩︎