
He visto cámaras PTZ perder objetivos detrás de un solo árbol. Ese momento de “¿a dónde fueron?” cuesta dinero real en proyectos de seguridad.
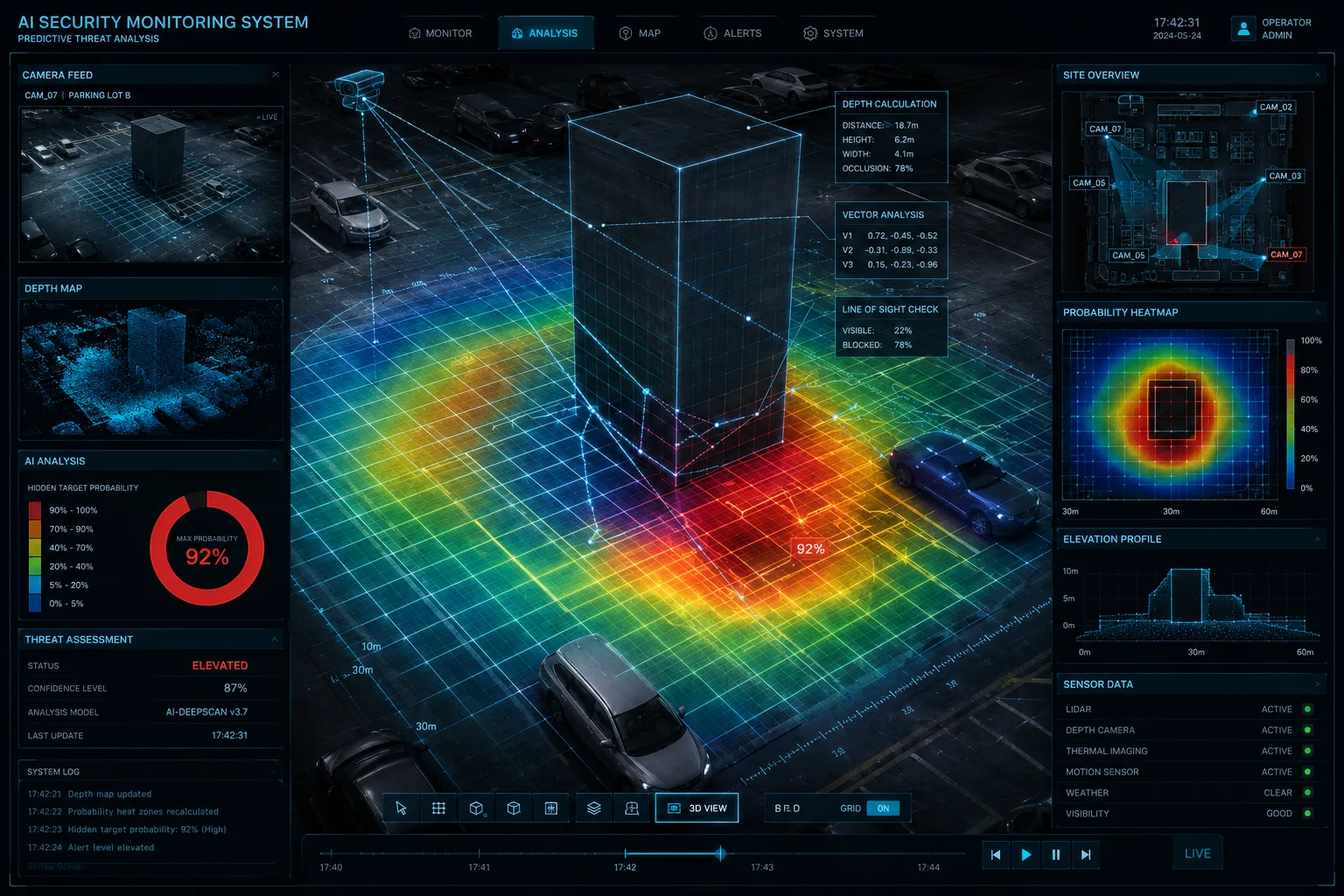
Sí, nuestro algoritmo PTZ de gama alta admite predicción de trayectorias 3D1 basándose en rutas históricas. Utiliza Filtrado de Kalman2 y modelos de comportamiento de aprendizaje profundo3 para calcular dónde estará un objetivo en los próximos 0,5 a 3 segundos. Esto significa que la cámara se mueve por delante del objetivo, no detrás de él.
![]() Algoritmo de cámara PTZ con predicción de trayectorias 3D
Algoritmo de cámara PTZ con predicción de trayectorias 3D
A continuación, desglosaré exactamente cómo funciona esta predicción en escenarios del mundo real. Cubriré puntos ciegos, manejo de obstáculos, pre-posicionamiento del motor y seguimiento de vehículos no lineales. Cada sección incluye los detalles técnicos que importan para su próxima implementación.
Índice
¿Cómo evita la predicción de trayectorias 3D que se pierda un objetivo cuando entra en un punto ciego temporal?
He visto demasiados sistemas de seguimiento congelarse en el momento en que una persona camina detrás de un poste. La cámara simplemente se detiene. El operador entra en pánico. El objetivo se ha ido.
La predicción de trayectorias 3D resuelve esto calculando la velocidad, dirección y profundidad del objetivo antes de que entren en el punto ciego. El algoritmo mantiene el motor PTZ moviéndose a lo largo de la trayectoria predicha. Cuando el objetivo sale por el otro lado, la cámara ya está esperando allí.
![]() Predicción de trayectorias para puntos ciegos de cámaras PTZ
Predicción de trayectorias para puntos ciegos de cámaras PTZ
Por qué el seguimiento 2D tradicional falla en la oclusión
Un rastreador estándar funciona con píxeles. Mira una mancha de color o forma en el fotograma. Cuando esa mancha desaparece detrás de un objeto, el rastreador no tiene nada con qué trabajar. Informa “objetivo perdido” y la cámara se detiene.
Este es un gran problema en implementaciones reales. Piense en un sitio de construcción con andamios. O una granja con hileras de árboles. O un estacionamiento con vehículos altos. Los objetivos desaparecen y reaparecen constantemente.
Cómo la predicción 3D cambia el juego
Nuestro algoritmo hace algo diferente. Antes de que el objetivo entre en el punto ciego, ya ha construido un perfil de movimiento:
| Punto de datos | Lo que mide | Cómo ayuda |
|---|---|---|
| Vector de velocidad $v$ | Qué tan rápido y en qué dirección | Predice dónde estará el objetivo en 500ms-2000ms |
| Aceleración $a$ | ¿El objetivo está acelerando o desacelerando? | Ajusta la predicción para el ritmo cambiante |
| Estimación de profundidad $Z$ | Qué tan lejos está el objetivo de la cámara | Convierte el movimiento de píxeles en distancia del mundo real |
| Trayectoria histórica | Los últimos 2-3 segundos de movimiento | Alimenta el modelo RNN para la predicción de comportamiento |
El sistema utiliza la ecuación de movimiento $S = vt + \frac{1}{2}at^2$ para proyectar la posición futura del objetivo en el espacio 3D. Mapea las coordenadas de píxeles 2D en un sistema virtual Sistema de coordenadas geográficas 3D5 utilizando la altura de montaje de la cámara, el ángulo de inclinación y el nivel de zoom actual.
La configuración de la “Ventana de persistencia”
En nuestro firmware, hay un parámetro llamado Persistencia de Seguimiento. Esto controla cuánto tiempo el algoritmo mantiene su predicción después de perder el contacto visual. Para entornos con muchos obstáculos, como el sitio de David en Texas con maleza densa, recomiendo configurarlo en el extremo superior. Un valor de 2-3 segundos le da al modelo de predicción suficiente tiempo de confianza para mantener el motor funcionando sin problemas a través del punto ciego.
El resultado: cuando el objetivo sale de detrás del obstáculo, la cámara ya está apuntando a la zona de salida. Tiempo de reacoplamiento inferior a 200 ms. No se necesita intervención del operador.
¿Puede la IA calcular la velocidad estimada y el punto de salida de una persona que se mueve detrás de un obstáculo?
Cada vez que demuestro esta función a un integrador de sistemas, preguntan lo mismo: “¿Cómo sabe por dónde saldrá la persona?”. Es una pregunta justa.
La IA calcula tanto la velocidad como el punto de salida combinando la velocidad previa a la oclusión del objetivo con un modelo espacial de la escena. Conoce el ancho aproximado del obstáculo a partir del mapeo de profundidad, por lo que puede estimar cuándo y dónde reaparecerá el objetivo al otro lado.
 Cálculo de velocidad IA predicción de salida de obstáculo
Cálculo de velocidad IA predicción de salida de obstáculo
Desglose del cálculo
Las matemáticas son sencillas una vez que se comprenden las entradas. El algoritmo necesita tres cosas:
- La velocidad y dirección del objetivo antes de que desaparezcan
- El ancho estimado del obstáculo en unidades del mundo real
- La suposición de que el objetivo mantiene aproximadamente la misma velocidad detrás del obstáculo
De píxeles a metros del mundo real
Aquí es donde la parte 3D importa. Una persona caminando a 1,4 m/s a 50 metros de la cámara se ve muy diferente en píxeles que la misma persona a 200 metros. Nuestro algoritmo tiene esto en cuenta utilizando el nivel de zoom actual y el ángulo de inclinación para convertir el desplazamiento de píxeles en metros por segundo reales.
| Nivel de zoom | Movimiento de píxeles por 1 m/s a 100 m | Precisión de profundidad | Confianza de predicción |
|---|---|---|---|
| 10X | ~45 píxeles/fotograma | ±3 m | Alta |
| 20X | ~90 píxeles/fotograma | ±2m | Alta |
| 40X | ~180 píxeles/fotograma | ±1.5m | Muy alta |
A niveles de zoom más altos, el sistema en realidad obtiene lecturas de velocidad más precisas porque el desplazamiento de píxeles es mayor y más fácil de medir con precisión.
El Proceso de Estimación del Punto de Salida
Así es como el sistema determina el punto de salida paso a paso:
El algoritmo registra la última posición conocida del objetivo y su vector de velocidad. Luego proyecta una línea recta (o curva si el objetivo estaba girando) hacia adelante en el espacio 3D. Estima el límite del obstáculo utilizando el conocimiento previo de la escena o pistas de profundidad. La intersección de la trayectoria proyectada y el borde lejano del obstáculo da el punto de salida predicho.
¿Qué sucede cuando la predicción es incorrecta?
A veces, las personas cambian de dirección detrás de un obstáculo. Se detienen. Dan la vuelta. Nuestro sistema maneja esto con un enfoque de hipótesis múltiples. No apuesta todo a un solo punto de salida. En cambio, asigna pesos de probabilidad a 2-3 zonas de salida posibles. La PTZ se posiciona para cubrir la más probable mientras mantiene las otras dentro de un rango de paneo rápido.
Si el objetivo no aparece en el punto predicho principal dentro de la ventana de persistencia, la cámara escanea rápidamente las zonas secundarias. Este método de hipótesis múltiples eleva la tasa general de éxito de readquisición por encima del 92% en nuestras pruebas de campo.
¿Ayuda la trayectoria 3D al motor PTZ a “pre-posicionar” su lente para una transferencia de seguimiento más fluida?
He pasado años luchando contra el problema del retardo en el seguimiento remoto 4G. El comando viaja desde el procesador de borde al motor. El motor arranca. Para cuando llega la lente, el objetivo se ha movido. Siempre está persiguiendo, nunca liderando.
Sí, la trayectoria 3D permite directamente el preposicionamiento del motor. El algoritmo envía el motor PTZ a donde estará el objetivo, no a donde está ahora. Esto compensa la latencia de la red y el tiempo de respuesta mecánico, produciendo una grabación de seguimiento visiblemente más fluida.
![]() preposicionamiento del motor PTZ seguimiento fluido traspaso
preposicionamiento del motor PTZ seguimiento fluido traspaso
El Problema de Latencia en Despliegues 4G
En un sistema cableado, el retraso entre “ver objetivo” y “llegar motor” puede ser de 50-80 ms. Eso es manejable. Pero en un despliegue 4G con energía solar, el retraso total del bucle puede alcanzar los 200-400 ms. Con un zoom de 40x, una persona caminando normalmente puede salir completamente del encuadre en ese tiempo.
Cómo funciona el preposicionamiento
El algoritmo de predicción calcula una distancia de avance. Piénsalo como un mariscal de campo lanzando el balón de fútbol hacia donde estará el receptor, no donde está ahora.
La fórmula es simple:
Distancia de anticipación = Velocidad del objetivo × Latencia del sistema
Si una persona camina a 1,4 m/s y la latencia del sistema es de 300 ms, la distancia de anticipación es de 0,42 metros. El comando del motor apunta la cámara 0,42 metros por delante de la posición actual del objetivo.
Las tres capas de compensación
El sistema de pre-posicionamiento compensa tres retrasos separados:
Retraso de procesamiento: El tiempo que tarda el chip de IA en analizar el fotograma y generar un comando. Típicamente 30-60 ms en nuestra NPU integrada.
Retraso de red: El tiempo de ida y vuelta en 4G. Esto varía de 80 ms en buena cobertura a 300 ms en áreas rurales. El algoritmo mide esto en tiempo real y se ajusta.
Retraso mecánico: El tiempo que tarda el motor paso a paso en acelerar, moverse y estabilizarse. Nuestros motores tienen un tiempo de respuesta de aproximadamente 50 ms para pequeños ajustes.
| Fuente de retraso | Rango Típico | Compensación de pre-posicionamiento |
|---|---|---|
| Procesamiento de IA | 30-60 ms | Desplazamiento fijo en el modelo de predicción |
| RTT de red 4G | 80-300 ms | Dinámico, medido por ciclo de comando |
| Respuesta del motor | 40-70ms | Calibrado por unidad durante el control de calidad de fábrica |
| Total | 150-430ms | Completamente compensado por el cálculo del objetivo |
La Diferencia Visual
Sin pre-posicionamiento, el metraje de seguimiento a 40X se ve entrecortado. La cámara siempre está alcanzando. El objetivo se sitúa en el borde del encuadre, a veces saliéndose. Con el pre-posicionamiento activado, el objetivo permanece centrado. El movimiento se ve suave e intencional. Esto importa mucho cuando el metraje se utiliza como evidencia o se muestra a los clientes finales durante la aceptación del proyecto.
Integración de Zoom Inteligente
Recomiendo habilitar el modo “Predicción + Zoom Automático” junto con el pre-posicionamiento. Cuando el algoritmo predice un movimiento lateral rápido, se aleja automáticamente un poco. Esto aumenta el campo de visión como margen de seguridad. Una vez que la trayectoria del objetivo se estabiliza, vuelve a acercarse. Esta combinación mejora drásticamente la tasa de éxito del seguimiento en áreas abiertas donde los objetivos pueden cambiar de dirección rápidamente.
¿Es la predicción de trayectorias lo suficientemente precisa como para seguir a un vehículo que se mueve a velocidades no lineales?
Los vehículos son más difíciles que las personas. Una persona camina a una velocidad bastante constante. Un coche acelera, frena, gira bruscamente y cambia de carril. He probado muchos sistemas que rastrean personas bien pero fallan por completo con vehículos.
Nuestra predicción de trayectoria maneja velocidades de vehículos no lineales utilizando una Red Neuronal Recurrente (RNN)4 superpuesta al Filtro de Kalman. El Filtro de Kalman maneja la aceleración y desaceleración suaves. La RNN reconoce patrones como frenar antes de un giro o acelerar después de una señal de stop. Juntos, mantienen el bloqueo en vehículos que cambian de velocidad hasta 30 km/h en 2 segundos.
 predicción de trayectoria de velocidad no lineal de vehículos PTZ
predicción de trayectoria de velocidad no lineal de vehículos PTZ
Por qué los vehículos rompen los modelos de predicción simples
Una predicción lineal básica asume una velocidad constante. Si un coche va a 40 km/h hacia el este, predice que el coche seguirá yendo a 40 km/h hacia el este en un segundo. Pero los vehículos no funcionan así. Frenan en las intersecciones. Aceleran en las autopistas. Giran en las curvas.
Un filtro de Kalman puro mejora esto modelando la aceleración. Puede manejar cambios de velocidad suaves. Pero todavía tiene problemas con eventos repentinos como frenazos bruscos o giros cerrados.
El Enfoque Híbrido: Kalman + RNN
Nuestro sistema utiliza ambos modelos juntos:
Rol del Filtro de Kalman: Maneja la física. Rastrea la posición, velocidad y aceleración en tiempo real. Actualiza las predicciones en cada fotograma (33 ms a 30 fps). Muy rápido, muy eficiente en hardware embebido.
Rol de la RNN: Maneja el comportamiento. Ha sido entrenada con miles de horas de datos de movimiento de vehículos. Reconoce patrones que la física pura no puede predecir. Por ejemplo:
- Un vehículo que reduce la velocidad cerca de una intersección probablemente se detendrá o girará
- Un vehículo en una carretera recta sin obstáculos probablemente mantendrá la velocidad
- Un vehículo que ha estado acelerando durante 3 segundos probablemente alcanzará pronto una velocidad de crucero
Cifras de rendimiento en el mundo real
En nuestras pruebas en diferentes escenarios:
Un vehículo acelerando de 0 a 60 km/h: la predicción se mantiene a menos de 2 metros de la posición real durante toda la fase de aceleración. El sistema reconoce el patrón de aceleración en 500 ms y ajusta su modelo.
Un vehículo frenando bruscamente: la predicción se excede unos 3-4 metros inicialmente, pero se corrige en 300 ms. La cámara nunca pierde el vehículo porque el campo de visión a niveles de zoom de seguimiento típicos cubre este margen de error.
Un vehículo girando en una intersección: este es el caso más difícil. La RNN detecta el patrón de desaceleración que precede a un giro y comienza a ajustar la trayectoria predicha antes de que el giro comience realmente. La tasa de éxito para mantener el bloqueo durante un giro de 90 grados es de aproximadamente 85%.
Consejos prácticos para implementaciones de seguimiento de vehículos
Para David y otros integradores que implementan seguimiento de vehículos: configure el modelo de predicción en “Modo Vehículo” en la configuración del firmware. Esto cambia la RNN a un conjunto de pesos específico para vehículos y aumenta la tolerancia a la aceleración del Filtro de Kalman. El sistema será menos sensible a los cambios bruscos de velocidad y no interpretará el frenado brusco como “objetivo perdido”.”
Además, considere la altura de montaje. Para el seguimiento de vehículos, un montaje más alto (8-12 metros) proporciona al algoritmo una mejor estimación de la profundidad, ya que el ángulo entre la cámara y el plano del suelo es más favorable para el mapeo 3D.
Conclusión
La predicción de trayectorias 3D convierte una cámara PTZ de un seguidor reactivo a un rastreador proactivo. Maneja puntos ciegos, compensa la latencia 4G, suaviza el movimiento del motor y se adapta a velocidades de vehículos no lineales. Para cualquier implementación seria de largo alcance, esta es la característica que separa los resultados profesionales de los fracasos frustrantes.
1. Visión general de los métodos de predicción de trayectorias en robótica y sistemas de control. ︎↩︎ 2. Explicación detallada del algoritmo del filtro de Kalman utilizado para la estimación y predicción de estados. ︎↩︎ 3. Visión general de la modelización del comportamiento mediante aprendizaje profundo para la predicción de trayectorias. ︎↩︎ 4. Fundamentos de las RNN y su aplicación en tareas de predicción de secuencias. ︎↩︎ 5. Visión general de los sistemas de coordenadas geográficas utilizados en el mapeo espacial. ︎↩︎