
Já perdi a conta de quantas vezes um cliente me ligou dizendo que sua predefinição de PTZ estava apontando para uma parede em vez de para o portão depois de uma tempestade.
O Auto-Flip e o Auto-Correction são dois recursos de nível de hardware dentro das câmeras PTZ que corrigem o desvio de posição causado pelo vento. O Auto-Correction usa sensores internos para encontrar o verdadeiro ponto zero e puxar a lente de volta para o ângulo correto. O Auto-Flip gira a câmera 180° em menos de um segundo ao rastrear um alvo além do limite mecânico. Juntos, eles mantêm suas predefinições precisas e sua filmagem ininterrupta, mesmo em ambientes com muito vento.
 Compensação de vento de correção automática da câmera PTZ
Compensação de vento de correção automática da câmera PTZ
A seguir, detalharei exatamente como esses recursos funcionam em nível de hardware e software. Também explicarei o que você deve perguntar ao seu fornecedor antes de assinar o pedido de compra. Se você instala câmeras em postes altos, pontes ou planícies abertas, este artigo é para você.
Minha câmera retornará automaticamente à sua predefinição exata se for empurrada por uma rajada de vento?
Certa vez, tive um cliente no Texas que instalou 12 câmeras PTZ ao longo de uma cerca. Depois de uma semana de muito vento, todas as predefinições estavam defasadas em 5 a 15 graus. Ele teve que enviar uma equipe para recalibrar cada uma delas manualmente.
Sim, uma câmera PTZ com Auto-Correction retornará à sua predefinição exata após uma rajada de vento. O sistema usa um sensor de referência interno - geralmente um acoplador óptico ou um codificador absoluto - para detectar qualquer desvio de posição. Em seguida, ele recalcula a contagem de pulsos do motor em relação ao verdadeiro ponto zero e aciona a lente de volta ao ângulo correto automaticamente.
 Retorno da predefinição da câmera PTZ após uma rajada de vento
Retorno da predefinição da câmera PTZ após uma rajada de vento
Como a opção “Retornar à predefinição” realmente funciona
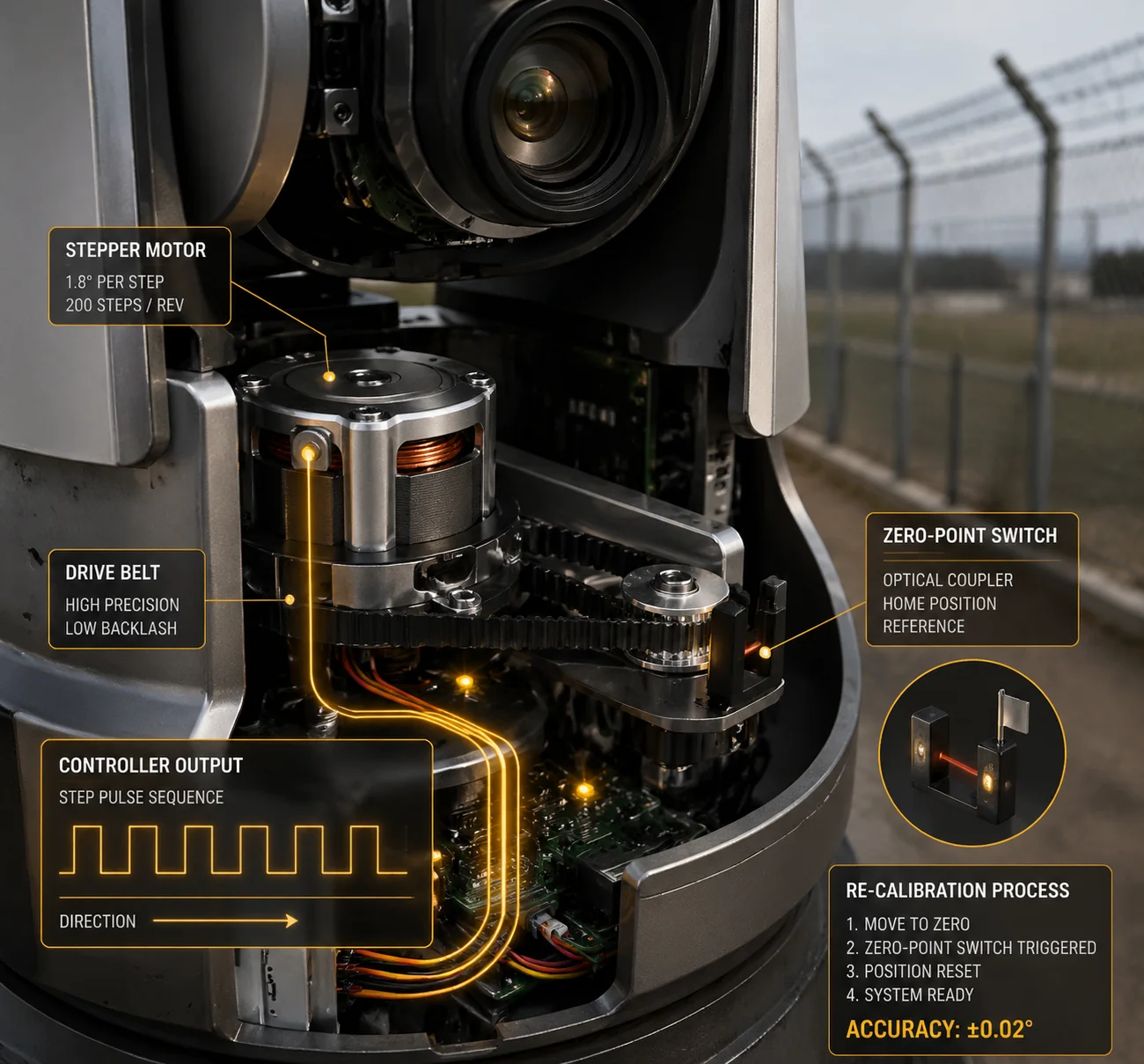
O principal aspecto a ser entendido é que a maioria das câmeras PTZ usa motores de passo. Um motor de passo se move em passos pequenos e fixos. O controlador conta esses passos para saber para onde a câmera está apontando. Isso funciona bem em condições normais. Mas quando um vento forte empurra o corpo da câmera, o eixo do motor pode escorregar. O controlador ainda acha que enviou 1.000 passos. Mas o motor moveu apenas 980. Essa lacuna é chamada de “passos perdidos”.”
Com o tempo, os passos perdidos vão se acumulando. Sua predefinição que estava apontada para o portão da frente agora aponta para o estacionamento.
A correção automática corrige isso adicionando um ponto de referência físico dentro da câmera. Veja como as duas principais abordagens se comparam:
| Método | Como funciona | Precisão | Custo |
|---|---|---|---|
| Interruptor de ponto zero (Home Switch) | Uma pequena chave óptica ou mecânica em uma posição fixa em cada eixo. A câmera gira até atingir essa chave e, em seguida, zera a contagem de passos. | Bom (±0,1°) | Baixa |
| Codificador absoluto 1 | Um sensor conectado ao eixo do motor que sempre sabe o ângulo exato, mesmo após a perda de energia. Não há necessidade de “procurar” o zero. | Excelente (±0,01°) | Mais alto |
| Recalibração periódica | A câmera executa uma rotina programada de “ir para casa” - por exemplo, uma vez a cada 24 horas - para redefinir o desvio acumulado. | Bom (depende da frequência) | Baixo (baseado em software) |
O que acontece durante um ciclo de correção
Quando a câmera detecta desvios - ou quando uma calibração programada é acionada - ela executa uma sequência rápida:
- O motor da panela gira até atingir o interruptor do ponto zero.
- O controlador redefine o contador de passos interno para 0.
- O motor de inclinação faz a mesma coisa em seu eixo.
- O controlador agora sabe a verdadeira posição física.
- Ele compara essa posição com as coordenadas predefinidas armazenadas.
- Se houver uma lacuna, ele aciona o motor para fechar essa lacuna.
Todo esse processo pode ocorrer em segundo plano. Na maioria das nossas unidades PTZ industriais Loyalty-Secu, o usuário nem sequer vê isso acontecer. A câmera faz isso entre os ciclos de patrulha ou durante as horas de baixa atividade.
O maior problema: quando todo o suporte muda
Aqui está algo que muitas pessoas não percebem. Às vezes, a própria câmera está bem. O suporte ou o poste se torceu ligeiramente com o vento. Agora, o ponto zero interno da câmera está correto em relação ao seu próprio corpo, mas o corpo em si está girado 3 graus para a esquerda em relação ao chão.
Nesse caso, a simples recalibração do ponto zero não ajudará. Você precisa de uma algoritmo de correção de predefinição em massa. Há uma patente chinesa bem documentada (CN106289182A) que descreve esse método exato:
- Escolha 3 posições predefinidas conhecidas.
- Confirme manualmente o quanto cada um deles se deslocou.
- O sistema calcula o deslocamento médio em Pan, Tilt e altura.
- Ele aplica esse deslocamento a todas as predefinições restantes de uma só vez.
Isso significa que, se você tiver 255 predefinições, não precisará corrigir todas as 255. Você corrige 3 e o software corrige o restante. Para um projeto com dezenas de câmeras em postes altos em áreas com muito vento, isso economiza dias de trabalho.
Como o sistema interno de “circuito fechado” detecta que o motor pulou uma etapa?
Eu costumava pensar que “circuito fechado” era apenas um termo de marketing. Então, abri uma unidade PTZ e vi a placa do codificador conectada diretamente ao driver do motor. Isso mudou completamente meu entendimento.
Um sistema de circuito fechado detecta etapas puladas comparando constantemente a posição comandada do motor com a posição real informada por um sensor. Se o motor foi instruído a mover 500 passos, mas o codificador lê apenas 490, o controlador envia imediatamente mais 10 passos para fechar a lacuna. Isso acontece em tempo real, em cada movimento.
 Sistema de codificador de motor de loop fechado PTZ
Sistema de codificador de motor de loop fechado PTZ
Circuito aberto vs. circuito fechado: Por que é importante no setor eólico
A maioria das câmeras PTZ econômicas usa um circuito aberto sistema. O controlador envia um comando: “Mova 500 passos para a direita”. Ele presume que o motor fez exatamente isso. Ele nunca verifica. Isso é como dar instruções de direção a alguém e desligar o telefone. Você espera que a pessoa tenha chegado, mas não sabe.
A circuito fechado é diferente. Ele tem um sensor - geralmente um codificador - que informa a posição real após cada movimento. Se a posição real não corresponder à posição comandada, o controlador a corrige imediatamente.
Aqui está uma comparação direta:
| Recurso | Circuito aberto (somente Stepper) | Circuito fechado (passo + codificador) |
|---|---|---|
| Conhece a posição real? | Não | Sim |
| Detecta etapas perdidas? | Não | Sim, em tempo real |
| Autocorreção após o impulso do vento? | Não (precisa de recalibração manual) | Sim (automático) |
| Custo | Inferior | Mais alto |
| Melhor para | Ambientes internos com pouco vento | Implantações externas, com ventos fortes e postes altos |
Como o codificador se comunica com o controlador
Em uma PTZ de loop fechado, o codificador é montado no mesmo eixo que o motor de passo. Toda vez que o motor gira, o codificador gera um sinal. O controlador lê esse sinal e o compara com o número de etapas que ele enviou.
Há dois tipos de codificadores comumente usados:
Codificadores incrementais
Contam os pulsos a partir de um ponto inicial. Eles são mais baratos, mas perdem a posição se a energia for cortada. Após um ciclo de energia, a câmera deve executar uma rotina completa de “home” para encontrar o zero novamente.
Codificadores absolutos
Eles sabem o ângulo exato em todos os momentos, mesmo após a falta de energia. Eles são mais caros, mas eliminam a necessidade de uma rotina doméstica. Para implantações propensas a ventos, os codificadores absolutos são a melhor opção porque as interrupções de energia são comuns durante tempestades.
O que isso significa para seu projeto
Se estiver implantando câmeras PTZ em áreas abertas - planícies, litorais, telhados, pontes -, faça uma pergunta direta ao seu fornecedor: “Seu sistema de motor PTZ é de circuito aberto ou de circuito fechado?”
Se eles disserem que é um circuito aberto, pergunte como eles lidam com as etapas perdidas. Se a resposta for “rotina doméstica periódica”, isso é aceitável, mas não ideal. Se a resposta for “não fazemos”, vá embora.
Na Loyalty-Secu, nossas unidades PTZ de nível industrial usam controle de loop fechado com codificadores ópticos nos eixos Pan e Tilt. Isso significa que cada movimento é verificado. Cada deslocamento induzido pelo vento é detectado. E toda correção acontece sem que o operador levante um dedo.
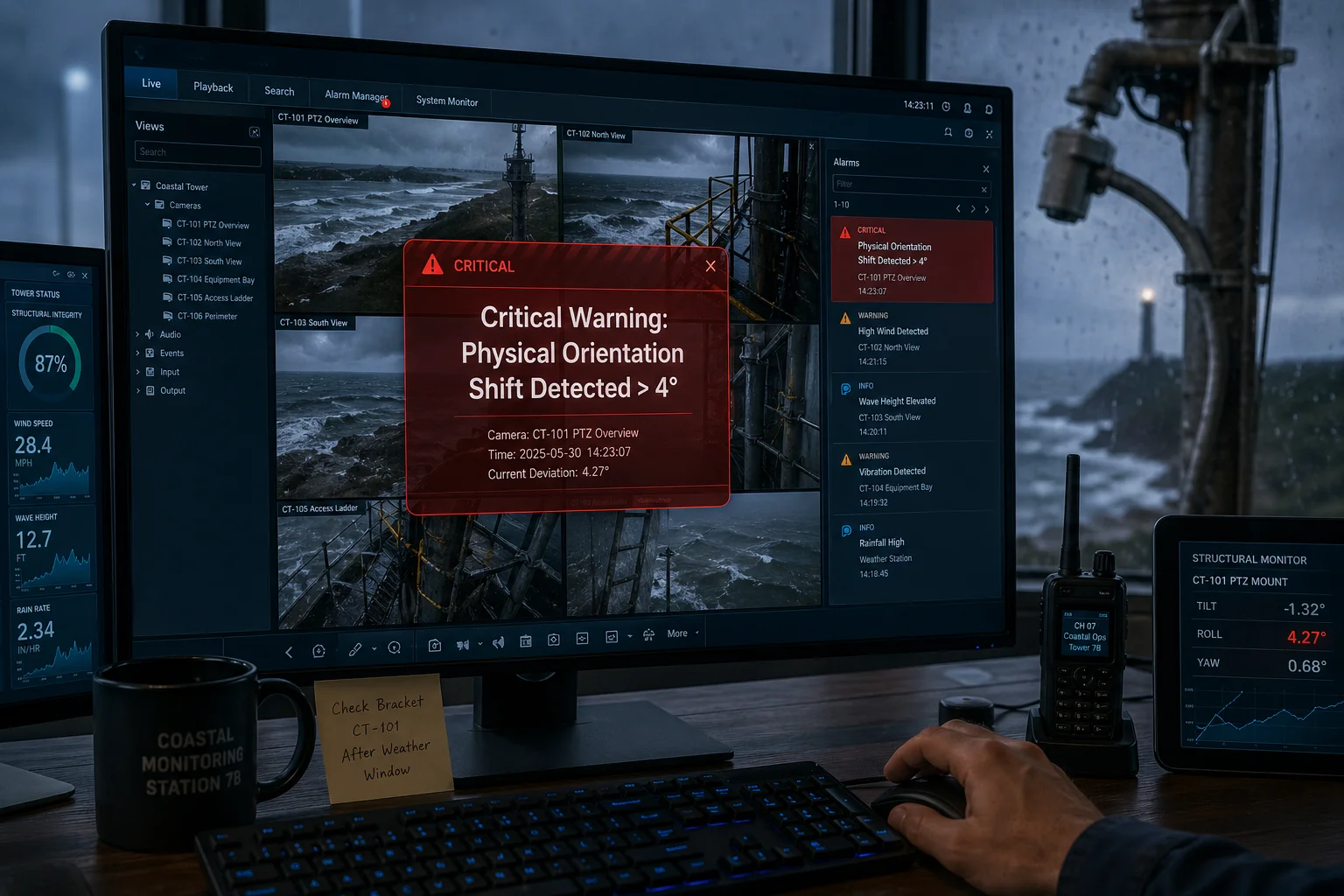
Posso receber um alerta se a orientação física da câmera tiver sido permanentemente alterada?
Tive um projeto em que uma câmera em uma torre costeira foi atingida por uma tempestade. O suporte se dobrou 4 graus. A câmera continuou funcionando, mas todas as predefinições estavam erradas. Ninguém percebeu por duas semanas.
Sim, os sistemas PTZ avançados podem enviar um alerta quando detectam uma mudança física permanente. A câmera compara seus dados atuais de calibração de ponto zero com a linha de base armazenada. Se o deslocamento exceder um limite definido - por exemplo, mais de 2 graus - ela aciona um alarme por meio do VMS ou envia uma notificação via e-mail ou Armadilha SNMP 2.**
 Notificação de alerta de mudança de orientação da câmera PTZ
Notificação de alerta de mudança de orientação da câmera PTZ
Por que os turnos permanentes são diferentes dos turnos temporários
O desvio temporário ocorre quando o vento empurra a câmera durante uma rajada, e a câmera se recupera. O sistema de circuito fechado lida com isso em tempo real. Não é necessária nenhuma ação humana.
A mudança permanente é diferente. Significa que algo físico foi alterado. O suporte se dobrou. Um parafuso se soltou. O próprio poste se inclinou. Os motores internos da câmera estão bem, mas todo o “sistema de coordenadas mundiais” da câmera girou em relação ao solo.
Como a câmera sabe que algo está permanentemente errado
Quando a câmera executa sua calibração periódica do ponto zero, ela compara o resultado com a última linha de base conhecida. Se o deslocamento for pequeno (menos de 0,5°), ele será corrigido silenciosamente. Se o deslocamento for grande e consistente em vários ciclos de calibração, o sistema o marcará como um mudança estrutural em vez de um erro do motor.
Aqui está a lógica típica do alerta:
| Condição | Resposta do sistema |
|---|---|
| Deslocamento < 0,5° após a calibração | Correção automática silenciosa. Sem alerta. |
| Deslocamento de 0,5° - 2° após a calibração | Faça a correção automática e registre um aviso no log de eventos do sistema. |
| Deslocamento > 2° após a calibração | Faça a correção automática, registre um erro e envie um alerta ao operador via VMS/email/SNMP. |
| Deslocamento > 5° ou falha na calibração | Bloqueie a câmera no modo de segurança e envie um alerta crítico. Recomende uma inspeção física. |
O que você deve fazer quando receber esse alerta
Quando você receber um alerta de “mudança permanente”, não basta executar novamente a calibração e seguir em frente. O alerta está lhe dizendo que algo físico mudou. Você precisa:
- Verifique se o suporte e o hardware de montagem estão soltos ou dobrados.
- Verifique se há movimento estrutural no poste ou na parede.
- Se o suporte estiver torto, mas a câmera estiver boa, endireite o suporte e, em seguida, execute o “recalibração com um clique” na interface da Web.
- Se não for possível enviar uma equipe imediatamente, use a opção correção de predefinição em massa método que descrevi anteriormente. Escolha 3 predefinições de referência, confirme suas novas posições e deixe que o sistema altere todas as 255 predefinições para que correspondam.
Integração de alertas com seu VMS existente
Se você usa plataformas como Marco 3 ou Íris Azul 4, Se você tiver uma PTZ, certifique-se de que ela seja compatível com as notificações de eventos ONVIF. Dessa forma, o alerta de “mudança de orientação” é exibido no mesmo painel que os outros alarmes. Você não precisa de uma ferramenta de monitoramento separada.
No Loyalty-Secu, nosso firmware PTZ expõe esses eventos por meio de canais de eventos ONVIF padrão.
A correção ocorre instantaneamente ou há um atraso no realinhamento da visualização?
Recebo muito essa pergunta. As pessoas se preocupam que a câmera “congele” ou “fique cega” durante o processo de correção.
A velocidade de correção depende do tipo de sistema. Uma PTZ de loop fechado com um codificador absoluto corrige em tempo real - o atraso visível é essencialmente zero. Uma PTZ de loop aberto que depende de uma rotina doméstica periódica pode levar de 2 a 5 segundos para concluir a recalibração, durante a qual a câmera se move brevemente para o ponto zero e volta. Em ambos os casos, o atraso é curto o suficiente para não criar uma lacuna significativa na cobertura de vigilância.
 Comparação do atraso da velocidade de correção da câmera PTZ
Comparação do atraso da velocidade de correção da câmera PTZ
Correção em tempo real vs. correção programada
Há dois modos de correção, e eles se comportam de maneira muito diferente.
Correção em tempo real (circuito fechado)
Em um sistema de circuito fechado, o codificador está sempre informando a posição real. Se o vento empurrar a câmera 0,3° para a esquerda, o controlador verá a incompatibilidade em milissegundos. Ele envia um comando de correção imediatamente. O motor empurra a câmera de volta. O usuário não vê nada. Não há nenhum movimento visível, nenhuma interrupção, nenhum ponto cego.
Essa é a configuração ideal para ambientes de alta segurança, onde até mesmo uma lacuna de 1 segundo na cobertura é inaceitável.
Correção programada (circuito aberto com rotina doméstica)
Em um sistema de loop aberto, a câmera não sabe que se desviou até executar uma rotina de calibração. Essa rotina geralmente é programada, por exemplo, uma vez a cada 6 horas ou uma vez por dia às 3 horas da manhã. Durante a rotina, a câmera gira fisicamente até o interruptor do ponto zero, redefine o contador e retorna à posição anterior.
Isso leva cerca de 2 a 5 segundos. Durante esses segundos, a câmera não está observando a área designada. Para a maioria dos aplicativos comerciais, isso é aceitável. Para infraestruturas críticas, não é.
E quanto à velocidade do Auto-Flip?
O Auto-Flip é um recurso separado, mas a velocidade também é importante aqui. Quando um alvo se move diretamente sob a câmera, a câmera atinge seu limite de inclinação mecânica. O Auto-Flip entra em ação e gira o eixo panorâmico em 180° enquanto inverte a imagem digitalmente.
Em nossas unidades PTZ Loyalty-Secu, toda essa inversão leva menos de 1 segundo. A imagem permanece com o lado direito para cima o tempo todo. O alvo permanece no quadro. Não há “zona morta” onde a câmera perde a visão do objeto.
Como testar isso antes de comprar
Peça ao seu fornecedor para fazer uma demonstração ao vivo. Peça que ele defina uma predefinição e, em seguida, empurre fisicamente o compartimento da câmera com cuidado para simular o vento. Observe quanto tempo leva para a câmera retornar à predefinição. Se demorar mais de 3 segundos ou se não retornar, isso lhe dirá tudo o que você precisa saber sobre a qualidade do sistema de correção.
Você também pode solicitar o número da câmera tempo de resposta da correção especificação por escrito. Se o fornecedor não puder fornecer esse número, provavelmente não o testou. E se ele não o testou, você não deve confiar nele em campo.
Na Loyalty-Secu, executamos testes de estresse automatizados em cada unidade PTZ antes do envio. Simulamos cargas de vento e medimos o tempo de resposta da correção. Incluímos esses dados em nossos relatórios de teste.
Conclusão
O Auto-Correction e o Auto-Flip não são recursos de luxo. Eles são essenciais para qualquer PTZ implantada em ambientes propensos ao vento. Solicite ao seu fornecedor controle de loop fechado, codificadores absolutos e correção de predefinição em massa - ou suas predefinições serão desviadas.
1. Operação do codificador rotativo absoluto para feedback da posição PTZ. ︎ 2. Configuração de armadilhas SNMP para notificações de alarme PTZ. ︎ 3. Assinatura de eventos ONVIF de marco para alertas de câmera. ︎ 4. Gerenciamento de alarmes e eventos do Blue Iris PTZ. ︎ 5. Detecção de perda de passo do motor de passo usando feedback do codificador. ︎ 6. Interruptor óptico de ponto zero para calibração doméstica de PTZ. ︎ 7. CN106289182A patente para o método de correção de predefinição em massa. ︎ 8. Comparação entre controle de motor em malha fechada e em malha aberta. ︎ 9. Serviço ONVIF PTZ para monitoramento e alertas de posição. ︎ 10. Bypass de limite de inclinação mecânica com inversão automática para rastreamento contínuo. ︎