
He perdido la cuenta de cuántas veces me ha llamado un cliente para decirme que su preselección PTZ apuntaba a una pared en lugar de a la puerta después de una tormenta.
Auto-Flip y Auto-Corrección son dos funciones a nivel de hardware dentro de las cámaras PTZ que corrigen la desviación de posición causada por el viento. La corrección automática utiliza sensores internos para encontrar el verdadero punto cero y devolver el objetivo al ángulo correcto. Auto-Flip gira la cámara 180° en menos de un segundo cuando el seguimiento de un objetivo supera el límite mecánico. Juntos, mantienen los preajustes precisos y el metraje intacto, incluso en entornos con mucho viento.
 Corrección automática del desplazamiento del viento de la cámara PTZ
Corrección automática del desplazamiento del viento de la cámara PTZ
A continuación explicaré cómo funcionan exactamente estas funciones a nivel de hardware y software. También explicaré lo que debe preguntar a su proveedor antes de firmar la orden de compra. Si instalas cámaras en postes altos, puentes o llanuras abiertas, este artículo es para ti.
¿Volverá mi cámara automáticamente a su preajuste exacto si la empuja una ráfaga de viento?
Una vez tuve un cliente en Texas que instaló 12 cámaras PTZ a lo largo de una valla. Después de una semana de mucho viento, todos los preajustes estaban desviados entre 5 y 15 grados. Tuvo que enviar a un equipo para recalibrarlas a mano.
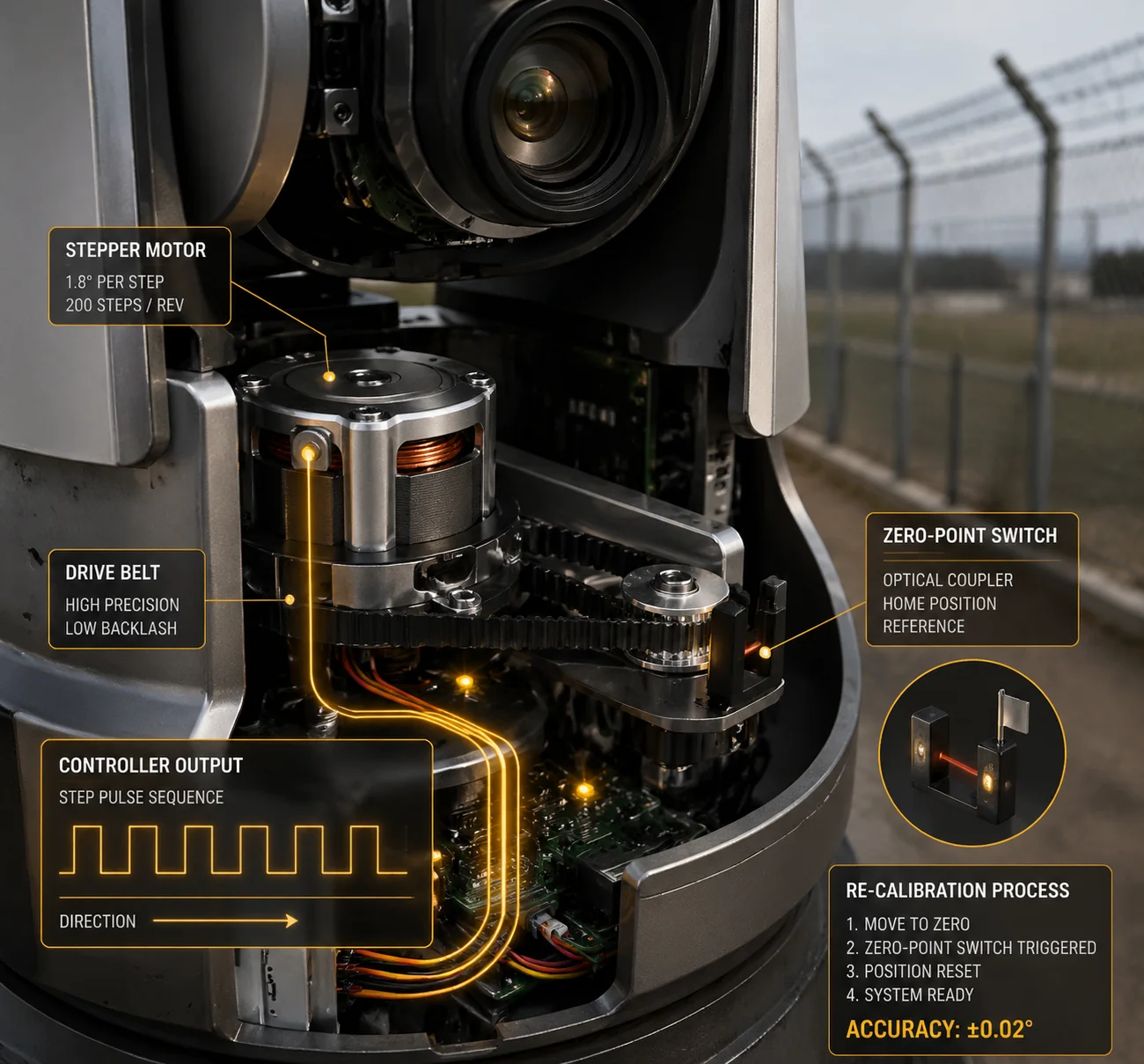
Sí, una cámara PTZ con Auto-Corrección volverá a su preajuste exacto después de una ráfaga de viento. El sistema utiliza un sensor de referencia interno (normalmente un acoplador óptico o un codificador absoluto) para detectar cualquier desviación de la posición. A continuación, recalcula el recuento de impulsos del motor con respecto al verdadero punto cero y devuelve el objetivo al ángulo correcto automáticamente.
 Retorno de preajuste de cámara PTZ tras ráfaga de viento
Retorno de preajuste de cámara PTZ tras ráfaga de viento
Cómo funciona realmente “Volver a preajuste
La clave para entender es que la mayoría de las cámaras PTZ utilizan motores paso a paso. Un motor paso a paso se mueve en pequeños pasos fijos. El controlador cuenta estos pasos para saber hacia dónde apunta la cámara. Esto funciona bien en condiciones normales. Pero cuando un viento fuerte empuja el cuerpo de la cámara, el eje del motor puede resbalar. El controlador sigue pensando que envió 1.000 pasos. Pero el motor sólo se movió 980. Este desfase se llama “pasos perdidos”.”
Con el tiempo, los pasos perdidos se acumulan. Su preselección, que apuntaba a la puerta principal, ahora apunta al aparcamiento.
La corrección automática lo soluciona añadiendo un punto de referencia físico dentro de la cámara. Así es como se comparan los dos enfoques principales:
| Método | Cómo funciona | Precisión | Coste |
|---|---|---|---|
| Interruptor de punto cero | Un pequeño interruptor óptico o mecánico en una posición fija de cada eje. La cámara gira hasta que toca este interruptor y, a continuación, pone a cero el recuento de pasos. | Buena (±0,1°) | Bajo |
| Codificador absoluto 1 | Un sensor acoplado al eje del motor que siempre conoce el ángulo exacto, incluso tras una pérdida de potencia. No es necesario “buscar” el cero. | Excelente (±0,01°) | Más alto |
| Recalibración periódica | La cámara ejecuta una rutina programada de “vuelta a casa” -por ejemplo, una vez cada 24 horas- para restablecer la deriva acumulada. | Bueno (depende de la frecuencia) | Bajo (basado en software) |
Qué ocurre durante un ciclo de corrección
Cuando la cámara detecta una desviación -o cuando se activa una calibración programada- realiza una secuencia rápida:
- El motor Pan gira hasta que alcanza el interruptor de punto cero.
- El regulador pone a 0 el contador de pasos interno.
- El motor de inclinación hace lo mismo en su eje.
- El controlador conoce ahora la verdadera posición física.
- Compara esta posición con las coordenadas preestablecidas almacenadas.
- Si hay un hueco, acciona el motor para cerrarlo.
Todo este proceso puede realizarse en segundo plano. En la mayoría de nuestras unidades PTZ industriales Loyalty-Secu, el usuario ni siquiera lo ve ocurrir. La cámara lo hace entre ciclos de patrulla o durante horas de baja actividad.
El mayor problema: cuando todo el grupo se desplaza
Aquí hay algo que mucha gente pasa por alto. A veces la cámara en sí está bien. El soporte o el poste se torcieron ligeramente con el viento. Ahora el punto cero interno de la cámara es correcto con respecto a su propio cuerpo, pero el propio cuerpo está girado 3 grados a la izquierda con respecto al suelo.
En este caso, una simple recalibración del punto cero no servirá de nada. Se necesita un algoritmo de corrección de preajuste masivo. Existe una patente china bien documentada (CN106289182A) que describe exactamente este método:
- Elige 3 posiciones predefinidas conocidas.
- Confirme manualmente cuánto se ha desplazado cada uno.
- El sistema calcula el desplazamiento medio en panorámica, inclinación y altura.
- Aplica ese desplazamiento a todos los preajustes restantes a la vez.
Esto significa que si tiene 255 preajustes, no necesita corregirlos todos. Usted fija 3, y el software fija el resto. Para un proyecto con docenas de cámaras en postes altos en zonas ventosas, esto ahorra días de trabajo.
¿Cómo detecta el sistema interno de bucle cerrado que el motor se ha saltado un paso?
Solía pensar que “bucle cerrado” era sólo un término de marketing. Entonces abrí una unidad PTZ y vi la tarjeta del codificador conectada directamente al controlador del motor. Eso cambió por completo mi comprensión.
Un sistema de bucle cerrado detecta los pasos omitidos comparando constantemente la posición ordenada del motor con la posición real indicada por un sensor. Si se ha ordenado al motor que se mueva 500 pasos, pero el encóder sólo lee 490, el controlador envía inmediatamente 10 pasos más para cerrar la brecha. Esto ocurre en tiempo real, en cada movimiento.
 Sistema de codificador de motor de bucle cerrado PTZ
Sistema de codificador de motor de bucle cerrado PTZ
Bucle abierto frente a bucle cerrado: La importancia de la energía eólica
La mayoría de las cámaras PTZ económicas utilizan un bucle abierto sistema. El controlador envía una orden: “Muévete 500 pasos a la derecha”. Se supone que el motor hizo exactamente eso. Nunca lo comprueba. Es como darle a alguien instrucciones para llegar y colgar el teléfono. Esperas que hayan llegado, pero no lo sabes.
A bucle cerrado es diferente. Dispone de un sensor, normalmente un codificador, que informa de la posición real después de cada movimiento. Si la posición real no coincide con la posición ordenada, el controlador la corrige inmediatamente.
He aquí una comparación directa:
| Característica | Bucle abierto (sólo paso a paso) | Lazo cerrado (Stepper + Encoder) |
|---|---|---|
| ¿Conoce la posición real? | No | Sí |
| ¿Detecta los pasos perdidos? | No | Sí, en tiempo real |
| ¿Se autocorrige tras el empuje del viento? | No (necesita recalibración manual) | Sí (automático) |
| Coste | Baja | Más alto |
| Lo mejor para | En interiores y con poco viento | Despliegues en exteriores, con vientos fuertes y postes altos |
Cómo se comunica el codificador con el controlador
En una PTZ de bucle cerrado, el codificador está montado en el mismo eje que el motor paso a paso. Cada vez que el motor gira, el codificador genera una señal. El controlador lee esta señal y la compara con el número de pasos que envió.
Existen dos tipos de codificadores utilizados habitualmente:
Codificadores incrementales
Cuentan los impulsos a partir de un punto de partida. Son más baratos pero pierden su posición si se corta la alimentación. Después de un ciclo de alimentación, la cámara debe hacer una rutina “home” completa para volver a encontrar el cero.
Encóderes absolutos
Éstos conocen su ángulo exacto en todo momento, incluso tras un corte de electricidad. Son más caros, pero eliminan la necesidad de una rutina doméstica. Para instalaciones expuestas al viento, los codificadores absolutos son la mejor opción, ya que las interrupciones del suministro eléctrico son frecuentes durante las tormentas.
Qué significa esto para su proyecto
Si va a instalar cámaras PTZ en zonas abiertas (llanuras, costas, tejados, puentes), debe hacer una pregunta directa a su proveedor: “¿Su sistema de motor PTZ es de bucle abierto o de bucle cerrado?”
Si dicen que es de bucle abierto, pregunte cómo gestionan los pasos perdidos. Si la respuesta es “rutina periódica en casa”, es aceptable pero no ideal. Si la respuesta es “no lo hacemos”, aléjate.
En Loyalty-Secu, nuestras unidades PTZ de calidad industrial utilizan un control de bucle cerrado con codificadores ópticos en los ejes de giro e inclinación. Esto significa que cada movimiento es verificado. Cada desplazamiento inducido por el viento se detecta. Y todas las correcciones se realizan sin que el operador mueva un dedo.
¿Puedo recibir una alerta si la orientación física de la cámara ha cambiado permanentemente?
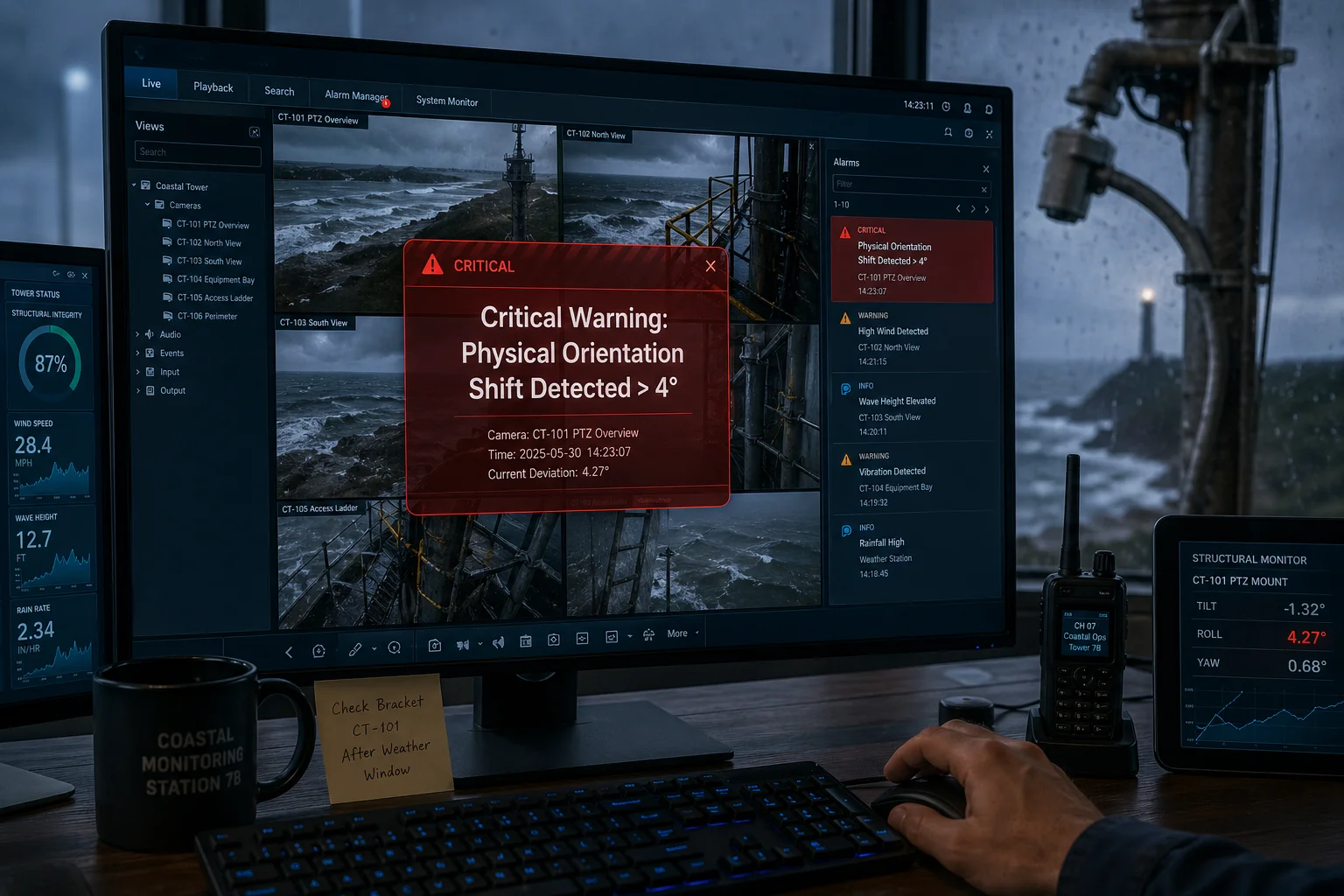
Tuve un proyecto en el que una cámara en una torre costera fue golpeada por una tormenta. El soporte se dobló 4 grados. La cámara siguió funcionando, pero todos los preajustes estaban mal. Nadie se dio cuenta durante dos semanas.
Sí, los sistemas PTZ avanzados pueden enviar una alerta cuando detectan un desplazamiento físico permanente. La cámara compara sus datos actuales de calibración del punto cero con la línea base almacenada. Si el desplazamiento supera un umbral establecido (por ejemplo, más de 2 grados), activa una alarma a través del VMS o envía una notificación a través de correo electrónico o Trampa SNMP 2.**
 Notificación de cambio de orientación de la cámara PTZ
Notificación de cambio de orientación de la cámara PTZ
Por qué los turnos permanentes son diferentes de los temporales
La deriva temporal se produce cuando el viento empuja la cámara durante una ráfaga y ésta rebota. El sistema de bucle cerrado lo controla en tiempo real. No es necesaria la intervención humana.
El cambio permanente es diferente. Significa que algo físico ha cambiado. El soporte se dobló. Un tornillo se ha aflojado. El poste se ha inclinado. Los motores internos de la cámara están bien, pero todo el “sistema de coordenadas mundo” de la cámara ha girado en relación con el suelo.
Cómo sabe la cámara que algo va permanentemente mal
Cuando la cámara ejecuta su calibración periódica de punto cero, compara el resultado con la última línea de base conocida. Si la desviación es pequeña (menos de 0,5°), se corrige silenciosamente. Si la desviación es grande y consistente a través de múltiples ciclos de calibración, el sistema lo marca como un cambio estructural en lugar de un error del motor.
Esta es la lógica típica de las alertas:
| Condición | Respuesta del sistema |
|---|---|
| Desplazamiento < 0,5° después del calibrado | Autocorrección silenciosa. Sin alerta. |
| Desplazamiento 0,5° - 2° después del calibrado | Autocorrección y registro de una advertencia en el registro de eventos del sistema. |
| Desplazamiento > 2° después del calibrado | Autocorrección, registro de errores y envío de una alerta al operador a través de VMS/email/SNMP. |
| Desviación > 5° o error de calibración | Bloquear la cámara en modo seguro y enviar una alerta crítica. Recomendar inspección física. |
Qué debe hacer cuando reciba esta alerta
Cuando reciba una alerta de “cambio permanente”, no se limite a volver a ejecutar la calibración y seguir adelante. La alerta le está diciendo que algo físico ha cambiado. Necesita hacerlo:
- Compruebe si el soporte y los herrajes de montaje están sueltos o doblados.
- Compruebe si el poste o la pared presentan movimientos estructurales.
- Si el soporte está doblado pero la cámara está bien, enderece el soporte y luego pase la “recalibrado con un clic” desde la interfaz web.
- Si no puede enviar una tripulación inmediatamente, utilice la función corrección preestablecida masiva que he descrito antes. Elige 3 preajustes de referencia, confirma sus nuevas posiciones y deja que el sistema cambie los 255 preajustes para que coincidan.
Integración de alertas con el VMS existente
Si utiliza plataformas como Hito 3 o Lirio azul 4, Asegúrese de que su PTZ es compatible con las notificaciones de eventos ONVIF. De este modo, la alerta de “cambio de orientación” aparecerá en el mismo panel que el resto de alarmas. No necesita una herramienta de supervisión independiente.
En Loyalty-Secu, nuestro firmware PTZ expone estos eventos a través de canales de eventos ONVIF estándar.
¿La corrección se produce al instante o hay un retraso en la realineación de la vista?
Esta pregunta me la hacen a menudo. A la gente le preocupa que la cámara se “congele” o “se quede ciega” durante el proceso de corrección.
La velocidad de corrección depende del tipo de sistema. Una PTZ de bucle cerrado con un codificador absoluto corrige en tiempo real: el retardo visible es prácticamente nulo. Una PTZ de bucle abierto que se basa en una rutina de inicio periódica puede tardar de 2 a 5 segundos en completar la recalibración, durante la cual la cámara se mueve brevemente al punto cero y viceversa. En ambos casos, el retardo es lo suficientemente corto como para no crear un vacío significativo en la cobertura de vigilancia.
 Comparación de la velocidad de corrección de la cámara PTZ
Comparación de la velocidad de corrección de la cámara PTZ
Corrección en tiempo real frente a corrección programada
Hay dos modos de corrección, y se comportan de manera muy diferente.
Corrección en tiempo real (bucle cerrado)
En un sistema de bucle cerrado, el codificador siempre informa de la posición real. Si el viento empuja la cámara 0,3º a la izquierda, el controlador detecta el desajuste en milisegundos. Envía inmediatamente una orden de corrección. El motor empuja la cámara hacia atrás. El usuario no ve nada. No hay movimiento visible, ni interrupción, ni ángulo muerto.
Es la configuración ideal para entornos de alta seguridad en los que incluso una interrupción de 1 segundo en la cobertura es inaceptable.
Corrección programada (bucle abierto con rutina doméstica)
En un sistema de bucle abierto, la cámara no sabe que se ha desviado hasta que ejecuta una rutina de calibración. Esta rutina suele estar programada, por ejemplo, una vez cada 6 horas o una vez al día a las 3 de la madrugada. Durante la rutina, la cámara gira físicamente hasta el interruptor de punto cero, reinicia su contador y vuelve a su posición anterior.
Esto tarda entre 2 y 5 segundos. Durante esos segundos, la cámara no está vigilando su zona asignada. Para la mayoría de las aplicaciones comerciales, esto es aceptable. Para infraestructuras críticas, no lo es.
¿Qué pasa con la velocidad Auto-Flip?
Auto-Flip es una función aparte, pero la velocidad también importa aquí. Cuando un objetivo se mueve directamente debajo de la cámara, ésta alcanza su límite mecánico de inclinación. Auto-Flip entra en acción y gira el eje Pan 180° mientras voltea la imagen digitalmente.
En nuestras unidades PTZ Loyalty-Secu, esta operación dura menos de 1 segundo. La imagen se mantiene en todo momento hacia arriba. El objetivo permanece en el encuadre. No hay “zona muerta” en la que la cámara pierda de vista al sujeto.
Cómo probarlo antes de comprar
Pida a su proveedor que le haga una demostración en directo. Pídales que establezcan un preajuste y, a continuación, empujen físicamente la carcasa de la cámara con suavidad para simular el viento. Observe cuánto tarda la cámara en volver a la configuración predeterminada. Si tarda más de 3 segundos, o si no vuelve en absoluto, eso le dirá todo lo que necesita saber sobre la calidad de su sistema de corrección.
También puede solicitar el tiempo de respuesta de la corrección especificación por escrito. Si el proveedor no puede facilitar este número, es probable que no lo haya probado. Y si no lo han probado, no debe confiar en él sobre el terreno.
En Loyalty-Secu, realizamos pruebas de estrés automatizadas en cada unidad PTZ antes de su envío. Simulamos cargas de viento y medimos el tiempo de respuesta de corrección. Incluimos estos datos en nuestros informes de pruebas.
Conclusión
Auto-Corrección y Auto-Flip no son características de lujo. Son esenciales para cualquier PTZ desplegada en entornos propensos al viento. Pregunte a su proveedor por el control de bucle cerrado, los codificadores absolutos y la corrección de preajustes en bloque; de lo contrario, sus preajustes se desviarán.
1. Funcionamiento del codificador rotatorio absoluto para retroalimentación de posición PTZ. ︎ 2. Configuración de trampas SNMP para notificaciones de alarmas PTZ. ︎ 3. Hito Suscripción a eventos ONVIF para alertas de cámaras. ︎ 4. Gestión de alarmas y eventos de Blue Iris PTZ. ︎ 5. Detección de paso perdido del motor paso a paso mediante realimentación del codificador. ︎ 6. Interruptor óptico de punto cero para calibración de inicio de PTZ. ︎ 7. Patente CN106289182A para el método de corrección de preajustes a granel. ︎ 8. Comparación entre el control del motor en bucle cerrado y en bucle abierto. ︎ 9. Servicio ONVIF PTZ para control de posición y alertas. ︎ 10. Desvío mecánico del límite de inclinación para un seguimiento continuo. ︎