
Fui questionado isso dezenas de vezes por integradores que trabalham no Texas, Alberta e no interior da Austrália. A resposta não é simples.
Sim, uma câmera PTZ com zoom óptico de 40X+ com iluminação a laser sincronizada e autofoco assistido por laser pode identificar placas de licença estáticas a 500 metros. Mas o sucesso depende do cumprimento de requisitos rigorosos: resolução mínima do sensor de 4K, mais de 100 pixels horizontais na placa, estabilização óptica de imagem e controle inteligente de potência do laser para evitar o branqueamento da placa devido à alta refletividade.
 Reconhecimento de placa de licença a laser de câmera PTZ 500m
Reconhecimento de placa de licença a laser de câmera PTZ 500m
Abaixo, detalharei cada camada técnica deste desafio. Explicarei o que o laser realmente faz, como o algoritmo lida com a refletividade da placa, o que o zoom 40X realmente entrega a 500 metros e se a multi-exposição pode salvá-lo na escuridão total. Se você está planejando um projeto de perímetro remoto, este é o guia que você precisa antes de comprometer o orçamento.
Índice
O Laser Fornecerá Contraste Refletivo Suficiente para Ler uma Placa de Licença dos EUA na Escuridão Total?
Já vi muitos projetos falharem porque o integrador assumiu que “visão noturna” significava “consegue ler placas a qualquer distância”. A 500 metros na escuridão total, a luz visível é inútil. Você precisa de laser.
Um iluminador a laser sincronizado de 808nm ou 940nm iluminador a laser1 fornece contraste refletivo suficiente para ler uma placa de licença dos EUA. retrorrefletiva2 na escuridão total a 500 metros, mas apenas quando o feixe de laser faz zoom automaticamente com a lente e o sistema inclui HLC (Compensação de Alta Luz)3 para evitar que o revestimento retrorrefletivo da placa fique totalmente branco.
 iluminação a laser visão noturna placa de licença 500m
iluminação a laser visão noturna placa de licença 500m
Como a Iluminação a Laser Funciona a 500 Metros
Na escuridão total, o sensor da sua câmera não recebe nenhum fóton da cena. Um array padrão de LEDs IR pode alcançar 100 ou 150 metros. Além disso, a luz se espalha demais. O laser é diferente. Um feixe de laser permanece focado em longas distâncias porque tem uma divergência muito baixa.
A 500 metros, o módulo laser projeta um cone estreito de luz infravermelha próxima na área alvo. A característica principal é chamada de “zoom pumping”. Isso significa que o ângulo do feixe de laser corresponde automaticamente ao campo de visão da lente. Ao dar zoom para 40X, o laser estreita seu feixe para cobrir apenas a pequena área em que você está olhando. Isso concentra toda a energia do laser em um pequeno ponto, proporcionando uma intensidade de iluminação muito alta em distâncias extremas.
O Problema da Refletividade
As placas de licença dos EUA usam material retrorrefletivo. Este material é projetado para refletir a luz diretamente de volta para sua fonte. Para um motorista atrás dos faróis, isso torna as placas fáceis de ler. Para uma câmera com um laser co-localizado, isso cria um problema. A placa reflete tanta luz do laser de volta que se torna um retângulo branco. Todos os caracteres desaparecem.
Como o Sistema Resolve Isso
| Recurso | Função | Por Que Importa a 500m |
|---|---|---|
| HLC (Compensação de Alta Luz) | Suprime a área mais brilhante no quadro | Evita o branqueamento da placa enquanto mantém os arredores visíveis |
| Controle Inteligente de Potência do Laser | A IA detecta a região da placa e reduz a saída do laser | Equilibra o brilho da placa com o contraste dos caracteres |
| Ampla Faixa Dinâmica (WDR) | Captura múltiplas exposições por quadro | Recupera detalhes tanto na placa brilhante quanto na carroceria escura do veículo |
808nm vs 940nm: Qual Comprimento de Onda do Laser?
Lasers de 808nm são mais eficientes. Eles produzem mais luz por watt. Mas emitem um brilho vermelho fraco visível ao olho humano. Lasers de 940nm são completamente invisíveis, mas precisam de mais energia para atingir a mesma distância de iluminação. Para vigilância discreta a 500 metros, 940nm é preferível. Para desempenho máximo onde a discrição não é crítica, 808nm oferece um retorno de sinal mais forte da placa.
O resultado final: o laser fornece contraste mais do que suficiente. O verdadeiro desafio de engenharia é controlar esse contraste para que a placa não fique superexposta.
Como o Algoritmo LPR (Reconhecimento de Placa de Licença) Lida com a “Alta Refletividade” das Placas?
Testei câmeras que podiam mostrar claramente uma placa aos meus olhos no monitor, mas o motor de LPR ainda falhava em lê-la. O algoritmo precisa de condições de imagem específicas que vão além do que os humanos consideram “legível”.”
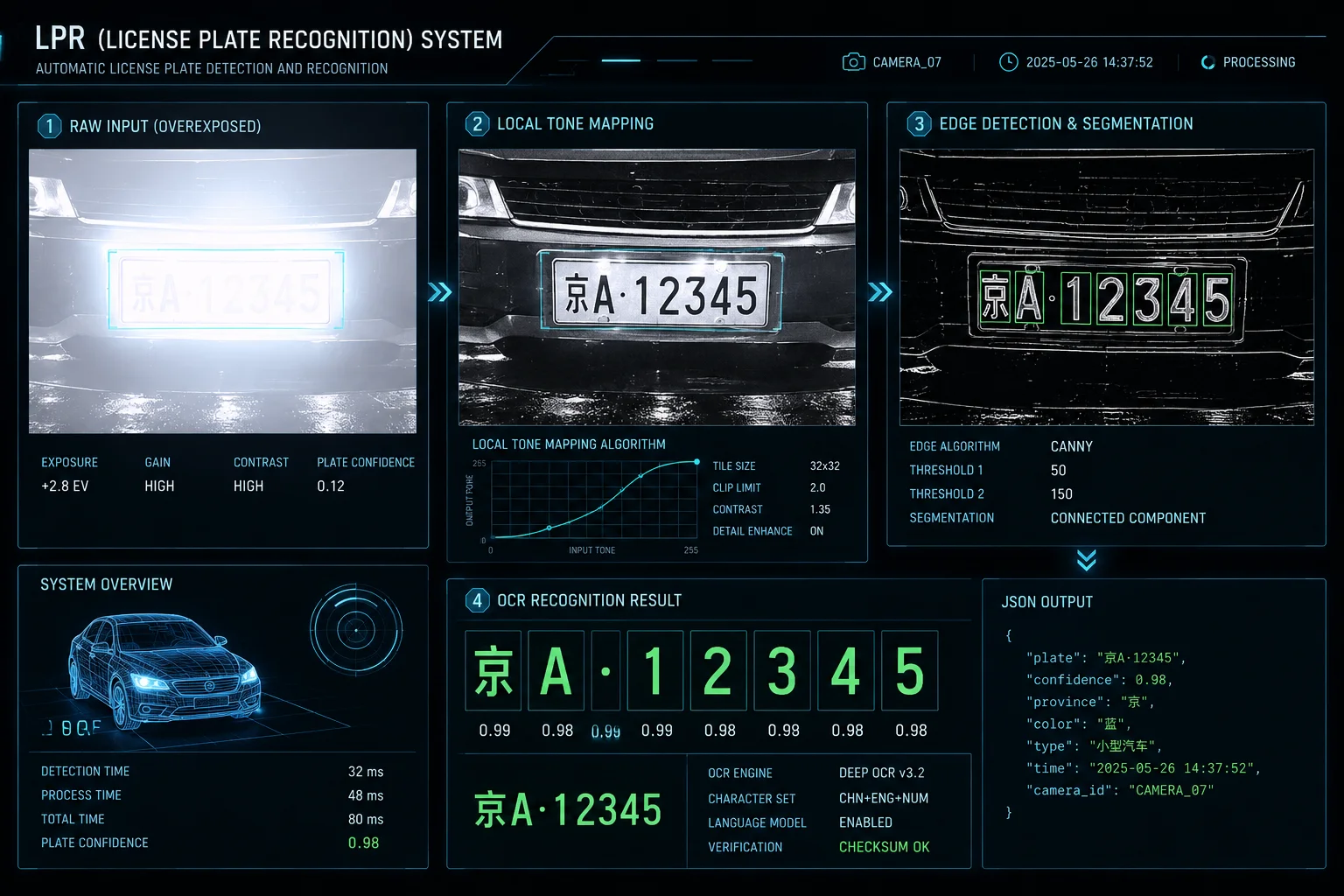
O algoritmo LPR lida com alta refletividade através de um pipeline de várias etapas: primeiro, o ISP (Processador de Sinal de Imagem) aplica mapeamento de tons local para comprimir a faixa dinâmica da região da placa; em seguida, o motor de OCR (Reconhecimento Óptico de Caracteres)4 usa filtros de detecção de bordas ajustados para limites de caracteres de alto contraste; finalmente, a pontuação de confiança rejeita leituras parciais e aciona a recaptura com configurações de exposição ajustadas.
 Processamento de placa de alta refletividade do algoritmo LPR
Processamento de placa de alta refletividade do algoritmo LPR
O que o Algoritmo Realmente Vê
Quando uma placa retrorrefletiva reflete a luz do laser de volta para o sensor, os valores dos pixels nessa região atingem o máximo (255 em 8 bits). Neste ponto, não há diferença entre o fundo branco e os caracteres. O algoritmo vê um bloco branco plano. Sem bordas. Sem características. Nada para ler.
O Estágio de Pré-processamento do ISP
Antes mesmo que o motor LPR receba a imagem, o ISP deve corrigir isso. Câmeras modernas usam mapeamento de tons baseado em região. O processador identifica o aglomerado mais brilhante de pixels (a placa) e aplica uma redução de ganho local. Isso é diferente do ajuste de exposição global. As áreas escuras circundantes mantêm seu brilho. Apenas a região da placa é comprimida.
| Estágio de Processamento | Condição de Entrada | Resultado de Saída |
|---|---|---|
| Exposição Global | Quadro inteiro muito claro ou escuro | Ajusta o brilho geral (insuficiente para placas) |
| Mapeamento de Tons Local | Região da placa saturada, arredores escuros | Comprime o brilho da placa independentemente |
| Realce de Bordas | Caracteres com contornos suaves | Nitidez nas transições entre caractere e fundo |
| Binarização | Imagem da placa em tons de cinza | Converte para preto/branco puro para análise OCR |
Por que Câmeras Padrão Falham
Uma câmera de segurança padrão sem firmware LPR dedicado trata a placa como qualquer outro objeto brilhante. Ela reduz a exposição global (tornando todo o resto muito escuro) ou deixa a placa estourar. Nenhuma das abordagens funciona para o reconhecimento de caracteres.
O Loop de Pontuação de Confiança
Bons sistemas LPR não leem apenas uma vez. Eles leem várias vezes em vários quadros. Cada leitura recebe uma pontuação de confiança. Se a pontuação estiver abaixo do limite (tipicamente 85%), o sistema sabe que algo está errado. Ele pode então acionar um microajuste: reduzir ligeiramente a potência do laser, alterar o tempo de exposição ou solicitar uma segunda captura com configurações diferentes. Para placas estáticas, esse loop é extremamente eficaz porque o alvo não está se movendo. O sistema tem tempo para iterar.
Segmentação de Caracteres a 500 Metros
A 500 metros com zoom de 40X e um sensor 4K, uma placa padrão dos EUA (12 polegadas de largura) ocupa aproximadamente 100-130 pixels horizontais. Cada caractere recebe cerca de 12-15 pixels de largura. Isso é apertado, mas viável para mecanismos de OCR modernos treinados em imagens de placas de baixa resolução. O algoritmo usa correspondência de modelos combinada com classificação de rede neural para identificar caracteres, mesmo quando pixels individuais estão ruidosos ou ligeiramente borrados.
Posso Usar o Zoom 40X para Capturar Detalhes da Placa em uma Entrada Remota sem Iluminação a 500 Metros?
Recebo essa pergunta de proprietários de fazendas e operadores de campos de petróleo no Texas todos os meses. Eles têm um portão a 500 metros em uma estrada de terra com iluminação zero. Eles querem saber quem está entrando.
Sim, 40X óptico de 40X5 pode capturar detalhes da placa a 500 metros em uma entrada sem iluminação, mas apenas quando emparelhado com iluminação laser sincronizada e autofoco assistido por laser. O zoom de 40X fornece a densidade de pixels necessária para o reconhecimento de caracteres, enquanto o laser resolve os desafios de iluminação e foco que tornam essa distância impossível para câmeras convencionais.
 Câmera PTZ com zoom 40X, entrada remota sem iluminação, 500 metros
Câmera PTZ com zoom 40X, entrada remota sem iluminação, 500 metros
Entendendo a Densidade de Pixels a 500 Metros
A métrica crítica é PPM: Pixels Por Metro na distância alvo. Para reconhecimento de placas de veículos, você precisa de pelo menos 100 pixels na largura da placa. Uma placa dos EUA tem 0,3 metros de largura. Portanto, você precisa de aproximadamente 330 PPM no alvo.
A Matemática Por Trás do Zoom 40X
Uma câmera típica com zoom 40X tem uma faixa de distância focal de cerca de 6 mm a 240 mm. Com 240 mm de distância focal e um sensor 4K de 1/1,8″:
- Campo de visão horizontal a 500m: aproximadamente 4,5 metros
- 3840 pixels em 4,5 metros = 853 PPM
- Largura da placa (0,3m) × 853 PPM = aproximadamente 256 pixels na placa
Isso está bem acima do mínimo de 100 pixels. Você tem resolução suficiente. Os números funcionam.
Por Que o Zoom Sozinho Não é Suficiente
É aqui que os projetos falham. O integrador vê a especificação de zoom, faz os cálculos e assume o sucesso. Mas com zoom 40X e 500 metros, três coisas falham:
Precisão do foco: A 240mm de distância focal, a profundidade de campo é extremamente rasa. Um erro de foco de apenas alguns metros resulta em uma imagem completamente borrada. O autofoco tradicional baseado em contraste busca para frente e para trás no escuro porque não tem contraste para travar. O telêmetro a laser autofoco6 resolve isso medindo a distância exata (500,3 metros, por exemplo) e acionando o motor de foco para a posição precisa. Sem busca. Sem atraso.
Distorção atmosférica: No calor do verão do Texas, o ar entre sua câmera e o portão cintila. Com zoom de 40x, esse cintilação se torna uma distorção severa da imagem. Os caracteres da placa tremem e borram. A estabilização óptica de imagem7 ajuda com vibrações mecânicas, mas não pode corrigir a turbulência atmosférica. A única solução parcial são algoritmos eletrônicos de desnevoamento que analisam vários quadros e reconstroem uma imagem composta mais nítida.
Estabilidade de montagem: Com zoom de 40x, uma vibração de 0,01 graus na câmera se traduz em aproximadamente 9 centímetros de deslocamento da imagem a 500 metros. Uma rajada de vento atingindo o poste, um caminhão passando pela montagem, até mesmo a expansão térmica do suporte de metal ao longo do dia — tudo isso cria borrões. Montagens robustas com amortecimento de vibração não são opcionais. São obrigatórias.
Requisitos de Instalação para Captura de Placa a 500m
A câmera deve ser montada em uma estrutura rígida. Postes de madeira flexionam. Postes finos de metal balançam. Uma base de concreto com um poste de aço pesado (diâmetro mínimo de 15 cm) é o ponto de partida. Alguns integradores despejam uma laje de concreto dedicada com parafusos de ancoragem especificamente para a montagem da câmera.
A Câmera Suporta “Multi-Exposição” para Equilibrar a Placa de Licença Brilhante com um Veículo Escuro?
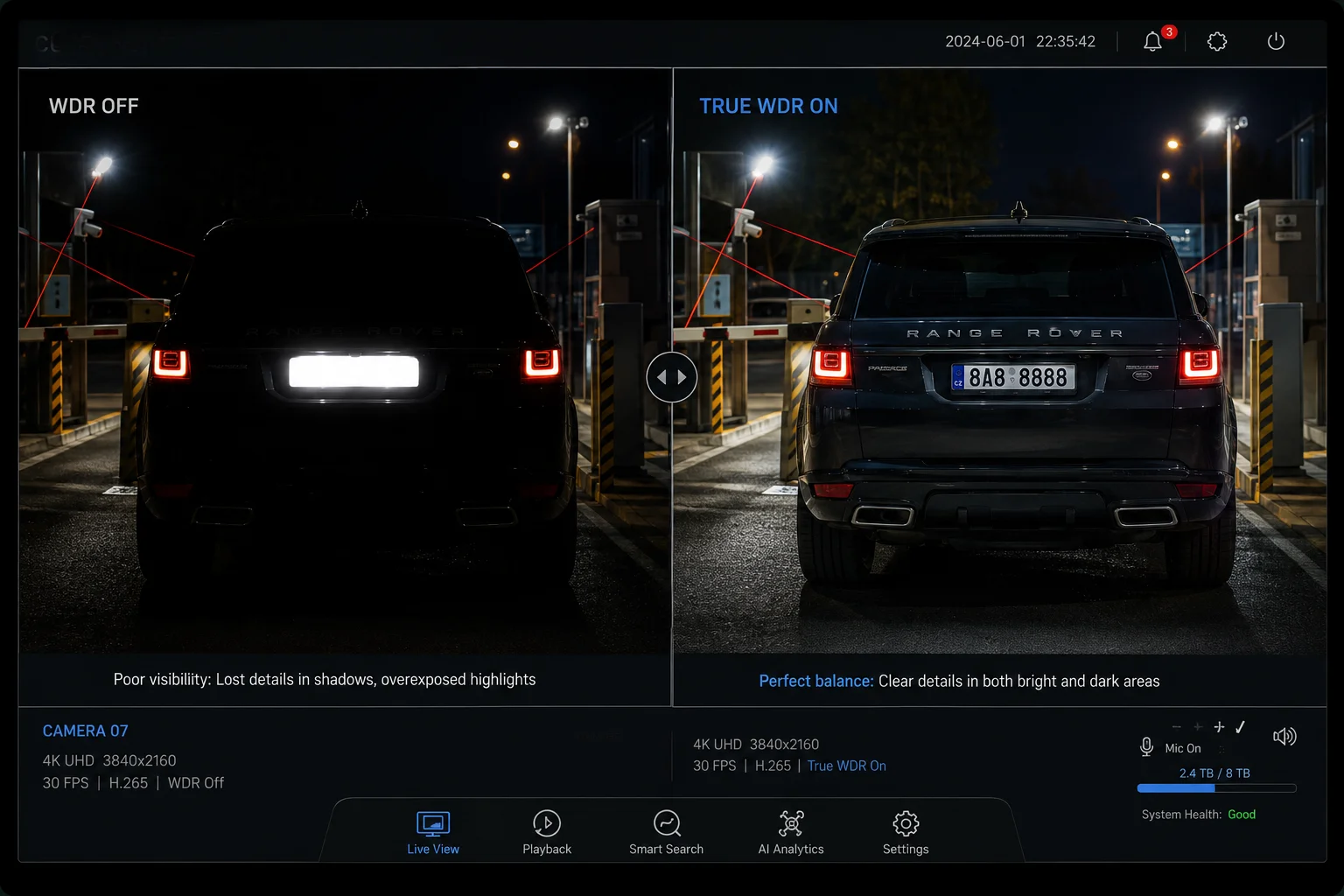
Já vi gravações onde a placa é perfeitamente legível, mas o veículo está completamente invisível. Ou o veículo está visível, mas a placa é uma mancha branca. Você precisa de ambos para evidências.
Sim, avançado Câmeras PTZ8 suporta multi-exposição (True Ampla Faixa Dinâmica (WDR)9) que captura exposições curtas e longas separadas dentro de um único ciclo de quadro. A exposição curta congela a placa de licença brilhante sem superexposição, enquanto a exposição longa revela a carroceria escura do veículo, e o ISP mescla ambas em uma única imagem equilibrada com caracteres de placa legíveis e detalhes do veículo visíveis.
 multi-exposição WDR placa de licença veículo escuro equilíbrio
multi-exposição WDR placa de licença veículo escuro equilíbrio
Como a Multi-Exposição Funciona na Prática
True WDR (Wide Dynamic Range) não é um filtro de software. É uma capacidade de hardware do sensor. O sensor captura duas ou três exposições em rápida sucessão dentro de um período de quadro (tipicamente 33ms para 30fps):
- Exposição curta (1/10000s): Captura a placa brilhante sem saturação. Os caracteres estão claros. A área circundante está preta.
- Exposição longa (1/100s): Captura a carroceria escura do veículo, a cor da roupa, os traços faciais. A placa está completamente estourada neste quadro.
- Fusão ISP: O processador combina ambos os quadros, pegando os detalhes da placa da exposição curta e os detalhes do veículo da exposição longa.
O Desafio de Alcance Dinâmico a 500 Metros
| Elemento da Cena | Nível de Brilho | Exposição Necessária |
|---|---|---|
| Placa retrorrefletiva (iluminada a laser) | ~10.000 lux equivalente | Muito curta (1/10000s) |
| Carroceria do veículo (iluminada a laser) | ~50-100 lux equivalente | Média (1/500s) |
| Cena circundante (sem luz) | ~0,01 lux | Muito longa (1/30s) |
| Rosto do motorista (através do para-brisa) | ~5-20 lux equivalente | Longa (1/100s) |
1. A diferença de brilho entre a placa iluminada por laser e o ambiente escuro pode exceder 120dB. Uma câmera padrão sem WDR lida com cerca de 60-70dB. Você perde a placa ou a cena. Câmeras com True WDR lidam com 120-140dB, o que cobre este cenário.
2. Por que isso importa para a coleta de evidências
3. Ler a placa informa qual veículo entrou. Mas para um registro de segurança completo, você também deseja a cor do veículo, marca, modelo e, idealmente, o rosto do motorista. Sem multi-exposição, você tem que escolher: placa ou contexto. Com multi-exposição, você obtém ambos em um único quadro.
4. Limitações a 500 metros
5. A multi-exposição funciona melhor quando o assunto está estático ou se movendo lentamente. A 500 metros, se um veículo estiver dirigindo a 48 km/h, ele se move cerca de 0,4 metros durante um ciclo de quadro de 33ms. Com zoom 40X, isso se traduz em um desfoque de movimento perceptível no quadro de longa exposição. Para a captura da placa de curta exposição, o desfoque de movimento é mínimo porque o tempo de exposição é muito breve.
6. Para o seu caso de uso de placas estáticas (veículos estacionados em um portão), a multi-exposição é ideal. O veículo não está se movendo. Ambas as exposições estão nítidas. A imagem mesclada fornece um quadro de evidência completo: placa legível, veículo visível e contexto circundante.
7. O tamanho do sensor importa
8. Sensores maiores (1/1.8″ ou 1/1.2″) coletam mais luz por pixel. Isso significa que a longa exposição não precisa ser tão longa, o que reduz o risco de desfoque de movimento. Um sensor 4K de 1/1.8″ 9. é o mínimo que recomendo para captura de placas com multi-exposição a 500 metros. Sensores menores (1/2.8″) simplesmente não têm capacidade de captação de luz suficiente para produzir quadros limpos de longa exposição a essa distância, mesmo com assistência a laser.10 10. A identificação de placas de licença estáticas a 500 metros com assistência a laser é alcançável, mas apenas quando zoom óptico (40X+), foco automático a laser, iluminação a laser sincronizada com controle de potência inteligente, multi-exposição com WDR verdadeiro e montagem sólida como rocha funcionam juntos. Pule qualquer um desses elementos e o sistema falha.
Conclusão
11. 1. Comparação de iluminadores a laser vs. LED para vigilância de longo alcance.
12. 2. Explica como materiais retrorreflexivos refletem a luz de volta para a fonte. ︎↩︎ 13. 3. HLC suprime áreas brilhantes para evitar superexposição, crucial para ler placas retrorreflexivas. ︎↩︎ 14. 4. Como os motores de OCR convertem imagens de texto em caracteres legíveis por máquina, usados em sistemas LPR. ︎↩︎ 15. 5. Explica como o zoom óptico amplia imagens sem perder resolução, essencial para identificação a longa distância. ︎↩︎ 16. 6. Descreve métodos de foco automático, incluindo medição de distância assistida por laser para foco preciso a longas distâncias. ︎↩︎ 17. 7. Explica como a estabilização óptica de imagem reduz o desfoque causado por vibração, crítico em níveis de zoom altos. ︎↩︎ 18. 8. Explica câmeras pan-tilt-zoom e suas aplicações em vigilância e monitoramento. ︎↩︎ 19. 9. A tecnologia WDR captura cenas com alto contraste mesclando múltiplas exposições. ︎↩︎ 9. A tecnologia WDR captura cenas de alto contraste mesclando múltiplas exposições. ︎↩︎ 10. Visão geral dos tamanhos de sensores e seu impacto no desempenho com pouca luz e na resolução para LPR. ︎↩︎