
Eu vi uma câmera PTZ solar 4G perfeitamente estável reiniciar no meio de uma transmissão porque alguém apertou o botão de zoom 40X muito rápido. Esse único momento de queda de tensão custou ao meu cliente uma visita técnica a um local remoto.
O sistema suprime quedas de tensão através de uma combinação de capacitores de grande volume5 para buffer de energia instantâneo, algoritmos de soft-start de motor S-curve que distribuem o consumo de corrente ao longo do tempo e reguladores Buck-Boost dedicados que isolam módulos sensíveis como o modem 4G e o SoC de quedas de tensão transitórias causadas por picos do motor PTZ.
 Supressão de queda de tensão da câmera PTZ durante o movimento do motor de zoom
Supressão de queda de tensão da câmera PTZ durante o movimento do motor de zoom
Abaixo, detalho cada camada deste sistema de proteção. Explicarei como o PMIC mantém seu modem ativo, por que o pan-tilt-zoom simultâneo não interromperá sua transmissão, como evitamos desligamentos falsos e por que o isolamento do barramento de energia da PCB é importante para a qualidade da imagem 4K.
Índice
O Circuito Integrado de Gerenciamento de Energia (PMIC) Estabiliza a Tensão para o Modem 4G Durante Picos de PTZ?
Eu vi modems 4G perderem sua conexão LTE porque o motor de zoom roubou tensão suficiente pelo tempo suficiente. Isso acontece em milissegundos, e o modem trata isso como uma falha de energia.
Sim. O PMIC usa um conversor Buck-Boost1 de alta eficiência para manter um barramento estável de 3,3V para o modem 4G, mesmo quando a tensão principal da bateria cai durante a inicialização do motor PTZ. Este estágio de regulação dedicado atua como um buffer entre a carga ruidosa do motor e o módulo celular sensível.
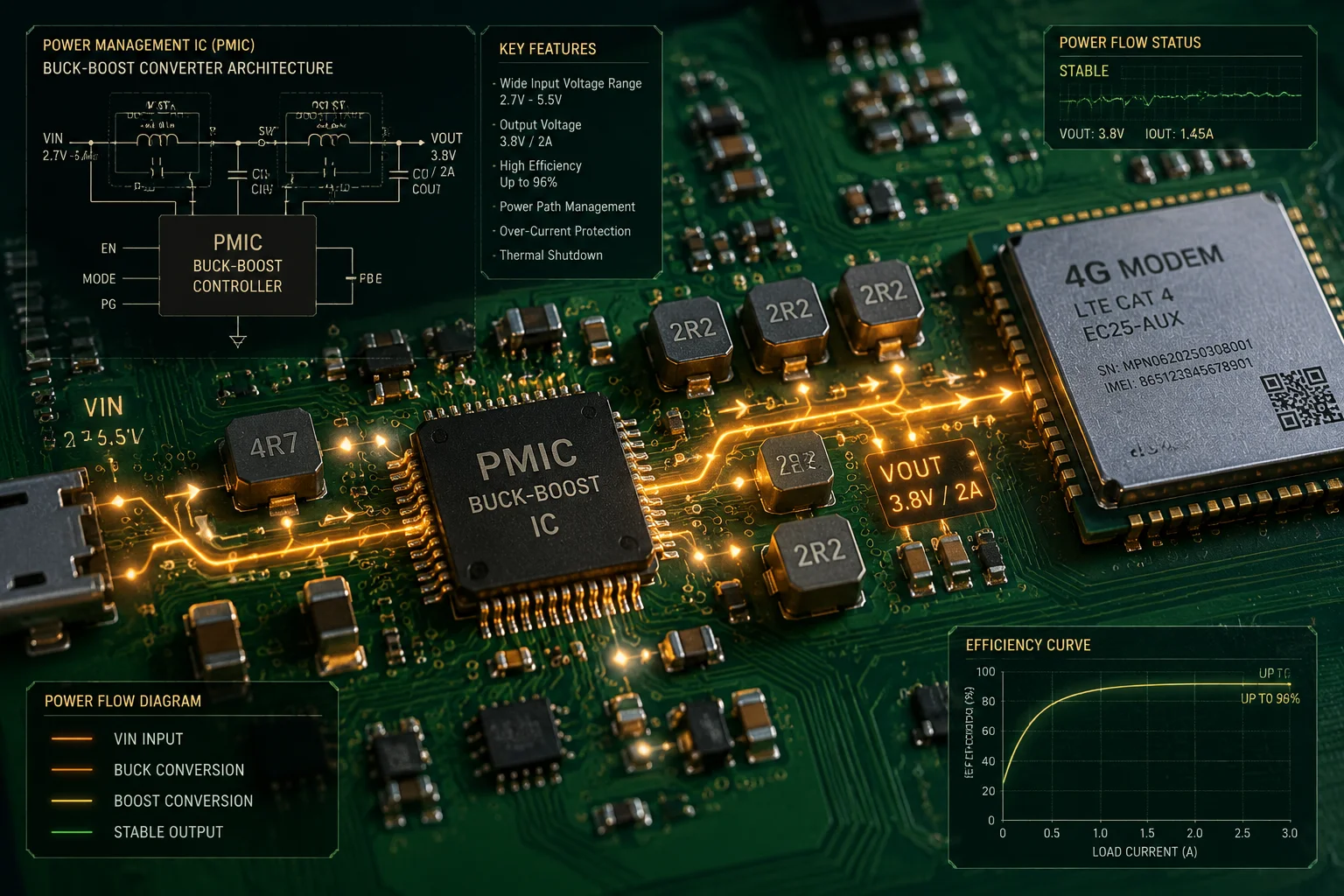 PMIC estabilizando a tensão para o modem 4G durante o pico de corrente do motor PTZ
PMIC estabilizando a tensão para o modem 4G durante o pico de corrente do motor PTZ
Como o PMIC Realmente Funciona Neste Contexto
A O Circuito Integrado de Gerenciamento de Energia (PMIC)2 não é apenas um único regulador de tensão. Em nosso projeto de câmera PTZ, é um chip de múltiplas saídas que recebe a entrada da bateria (tipicamente 12V) e cria várias saídas reguladas independentes. Cada saída atende a um subsistema diferente.
O modem 4G precisa de energia limpa e estável de 3,3V. O SoC precisa de barramentos de 1,2V e 1,8V. O driver do motor precisa dos 12V completos. O PMIC gerencia tudo isso a partir de uma única fonte de entrada.
Por que a Topologia Buck-Boost Importa
Um simples conversor Buck (abaixador) falha quando a tensão de entrada cai abaixo da tensão de saída. Durante uma operação de zoom intensa, a tensão da bateria pode cair momentaneamente de 12V para 10V ou até menos. Um conversor Buck-Boost funciona em ambas as direções. Ele pode diminuir a tensão quando a bateria está cheia e aumentá-la quando a bateria cai. Isso significa que a saída de 3,3V permanece em 3,3V, independentemente do que o motor esteja fazendo na linha principal.
A Estratégia de Desacoplamento
Entre a saída do PMIC e a entrada do modem 4G, colocamos capacitores de desacoplamento adicionais. São pequenos capacitores cerâmicos (tipicamente de 10µF a 100µF) colocados fisicamente próximos aos pinos de alimentação do modem. Eles atuam como um filtro final, capturando qualquer ruído de alta frequência que passe pelo PMIC.
| Componente | Função | Por que é importante |
|---|---|---|
| PMIC Buck-Boost | Mantém a saída estável em uma ampla faixa de entrada | Evita a queda de tensão do modem durante picos do motor |
| Capacitores de Desacoplamento Cerâmicos | Filtra o ripple de alta frequência na entrada do modem | Impede que o EMI do PWM do motor chegue ao modem |
| Ferrite Bead | Bloqueia o ruído conduzido na trilha de alimentação | Isola o ruído de comutação do motor da linha do modem |
| Circuito UVLO | Desliga graciosamente abaixo do limiar seguro | Evita a corrupção de dados por energia instável |
Validação do Mundo Real
Em nossos testes, simulamos cenários de pior caso. Comandamos um zoom de 40X em velocidade máxima enquanto a bateria está com 30% de carga e o modem 4G está no meio de um upload. Monitoramos a linha de alimentação do modem com um osciloscópio. O ripple aceitável é inferior a 50mV pico a pico. Se exceder isso, o modem pode perder pacotes ou perder o registro com a torre celular.
David, para suas implantações na América do Norte, isso significa que sua câmera continua transmitindo mesmo quando um operador de segurança dá zoom rapidamente em uma placa de licença. O modem nunca vê o caos de tensão que acontece no lado do motor da placa.
Minha Transmissão de Vídeo Falhará ou Reiniciará se Eu Mover o Zoom e a Inclinação Simultaneamente?
Tive um cliente que me ligou frustrado porque toda vez que seu operador girava e dava zoom simultaneamente, o feed ao vivo congelava por dois segundos. Ele pensou que a câmera estava quebrada. Não estava. O sistema de energia era apenas mal projetado.
Não. Nosso firmware usa um Intercalação de fase4 estratégia que escalona as inicializações dos motores em 20-50 milissegundos, evitando o consumo de corrente de pico simultâneo. Combinado com o buffer de capacitor em massa, o codificador de vídeo e o modem 4G mantêm energia ininterrupta mesmo durante comandos agressivos de PTZ multieixo.
 Estabilidade do fluxo de vídeo durante o movimento simultâneo de pan, tilt e zoom
Estabilidade do fluxo de vídeo durante o movimento simultâneo de pan, tilt e zoom
Entendendo o Problema do “Pico Duplo”
Cada eixo PTZ tem seu próprio motor. O motor de pan, o motor de tilt e o motor de zoom podem receber comandos ao mesmo tempo. Se os três começarem a se mover no exato mesmo instante, suas correntes de partida se somam. Um único motor pode consumir 2A na partida. Três motores começando juntos consomem 6A. Em um sistema de bateria solar classificado para 8A contínuos, esse pico de 6A somado à linha de base de 2A (SoC + modem + sensor) leva o sistema ao seu limite.
Como a Intercalação de Fase Resolve Isso
O firmware nunca inicia todos os motores no mesmo milissegundo. Quando um comando “ir para predefinição” chega, que requer movimento de pan, tilt e zoom, o sistema os enfileira:
- T = 0ms: O motor de pan inicia a rampa de soft-start
- T = 30ms: O motor de tilt inicia a rampa de soft-start
- T = 60ms: O motor de zoom inicia a rampa de soft-start
Quando o motor de zoom começa a consumir corrente, o motor de pan já passou de sua fase de pico de partida e se estabilizou na corrente de funcionamento em estado estacionário. Os picos nunca se sobrepõem.
O Perfil de Aceleração S-Curve
Mesmo dentro da partida de cada motor, a corrente não salta instantaneamente. O firmware usa um perfil de aceleração S-curve3. Pense nisso como um carro acelerando suavemente de uma parada em vez de pisar fundo no pedal do acelerador. O ciclo de trabalho PWM aumenta seguindo uma função sigmoide. Isso espalha o consumo de corrente por 50-100 milissegundos em vez de atingir o pico em menos de 5 milissegundos.
O Que Acontece com o Pipeline de Vídeo
O codificador de vídeo (dentro do SoC) tem seu próprio dedicado regulador de dropout baixo (LDO)8. Mesmo que a linha principal de 5V caia ligeiramente, o LDO absorve essa variação e fornece uma saída limpa de 1,8V para o núcleo do codificador. O sensor 4K também fica atrás de seu próprio regulador. Assim, o pipeline de imagem é duplamente isolado do ruído do motor.
O resultado: sem quedas de quadros, sem reinicializações do codificador, sem interrupções de fluxo. O operador vê vídeo suave e contínuo enquanto comanda movimentos complexos de PTZ.
Teste de Cenário de Pior Caso
Testamos isso criando scripts de tours rápidos de presets. A câmera alterna entre 8 presets com tempo de permanência zero, forçando movimento constante em vários eixos. Executamos este teste por 72 horas seguidas com bateria. Se o fluxo cair mesmo uma vez, a equipe de firmware ajusta o tempo de interleaving ou aumenta a duração da rampa de soft-start.
Como Você Evita que a “Queda de Tensão” da Bateria Cause um Desligamento Falso por “Baixa Potência”?
Uma vez depurei um sistema que continuava desligando em “bateria de 40%”. A bateria estava boa. O BMS estava lendo a tensão de queda durante o movimento do motor e entrando em pânico. Ele pensou que a bateria estava morta quando na verdade estava apenas sob carga pesada.
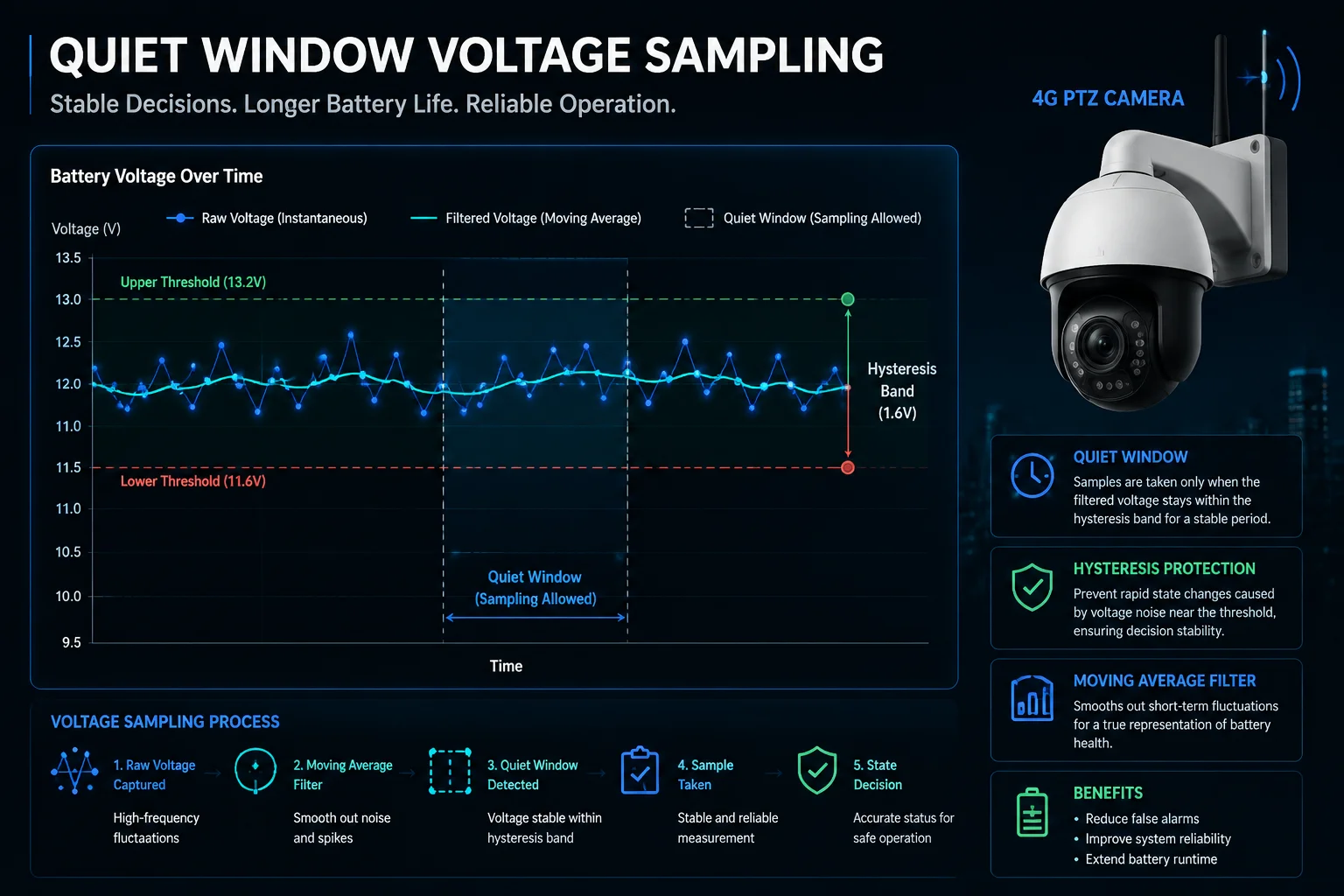
Evitamos desligamentos falsos amostrando a tensão da bateria apenas durante os períodos de inatividade do motor, aplicando um filtro de média móvel às leituras de tensão e definindo o limite de baixa potência com uma banda de histerese que leva em conta a queda esperada sob carga. O sistema distingue entre bateria genuinamente baixa e queda temporária de tensão.
 Prevenção de queda de tensão da bateria, desligamento falso por baixa potência, câmera PTZ
Prevenção de queda de tensão da bateria, desligamento falso por baixa potência, câmera PTZ
A Causa Raiz dos Desligamentos Falsos
A tensão terminal de uma bateria de lítio cai sob carga. Isso é física normal. A bateria tem resistência interna. Quando a corrente flui através dessa resistência, a tensão cai (lei de Ohm: V = I × R). Uma bateria mostrando 12,0V em repouso pode mostrar 11,2V ao fornecer 5A aos motores. Se o firmware ler a tensão durante essa corrente de 5A e compará-la a um limite estático (digamos, 11,0V = desligamento), ele pode disparar um alarme falso.
Amostragem Inteligente de Tensão
Nosso firmware usa uma técnica que chamo de “amostragem de janela silenciosa”. O sistema sabe quando os motores estão ativos porque os comanda. Portanto, ele só faz leituras de tensão da bateria durante os períodos em que nenhum motor está em movimento. Se a câmera estiver em movimento contínuo (como durante um tour de patrulha), o firmware espera a breve pausa entre as transições de preset para obter uma amostra de tensão limpa.
A Banda de Histerese
| Estado da Bateria | Limiar de Tensão | Ação |
|---|---|---|
| Operação Normal | Acima de 11,5V (em repouso) | Todos os sistemas ativos |
| Aviso de Baixa Potência | Abaixo de 11,5V por 30 segundos | Reduzir tarefas não essenciais |
| Crítico Baixo | Abaixo de 10,8V por 60 segundos | Sequência de desligamento gracioso |
| Recuperação | Acima de 12,0V por 10 segundos | Retomar operação normal |
Observe a diferença entre o limite de desligamento (10,8V) e o limite de recuperação (12,0V). Isso é histerese. Impede que o sistema alterne rapidamente entre desligamento e recuperação.
Filtro de Média Móvel
O firmware mantém uma média móvel das últimas 10 amostras de tensão, cada uma tirada a cada 5 segundos durante janelas ociosas. Uma única leitura baixa não aciona nada. A média deve permanecer abaixo do limite por um período sustentado. Isso elimina gatilhos falsos de eventos transitórios breves.
Coordenação do BMS
Para as instalações de David que usam pacotes de bateria externos, recomendamos um Sistema de Gerenciamento de Bateria (BMS)9 com um corte de descarga não superior a 10,0V (para um sistema de 12V). Isso dá à lógica interna da câmera espaço para gerenciar o desligamento gracioso antes que o BMS corte a energia. Se o limite do BMS for definido muito próximo ao limite da própria câmera, você terá uma condição de corrida em que ambos tentam desligar ao mesmo tempo, potencialmente corrompendo as filmagens armazenadas.
O Requisito de Descarga de 10A
David, isso é crítico para suas câmeras 40X. O BMS deve suportar pelo menos 10A de descarga instantânea. Muitos controladores de bateria solar prontos são classificados para 3-5A. Isso é bom para uma câmera estática. Mas uma PTZ 40X com pan, tilt, zoom e iluminador infravermelho pode consumir brevemente 8-9A. Se o seu BMS não conseguir lidar com isso, ele cortará a energia e você culpará a câmera. A câmera está bem. O BMS é o gargalo.
Existem Barramentos de Energia Dedicados na PCB para Isolar os Motores Barulhentos do Sensor 4K?
Aprendi essa lição no início da minha carreira. Uma única trilha de energia compartilhada entre um motor de passo e um sensor de imagem criava faixas horizontais em todos os quadros. O ruído era conduzido diretamente pelo plano de energia para os circuitos analógicos do sensor.
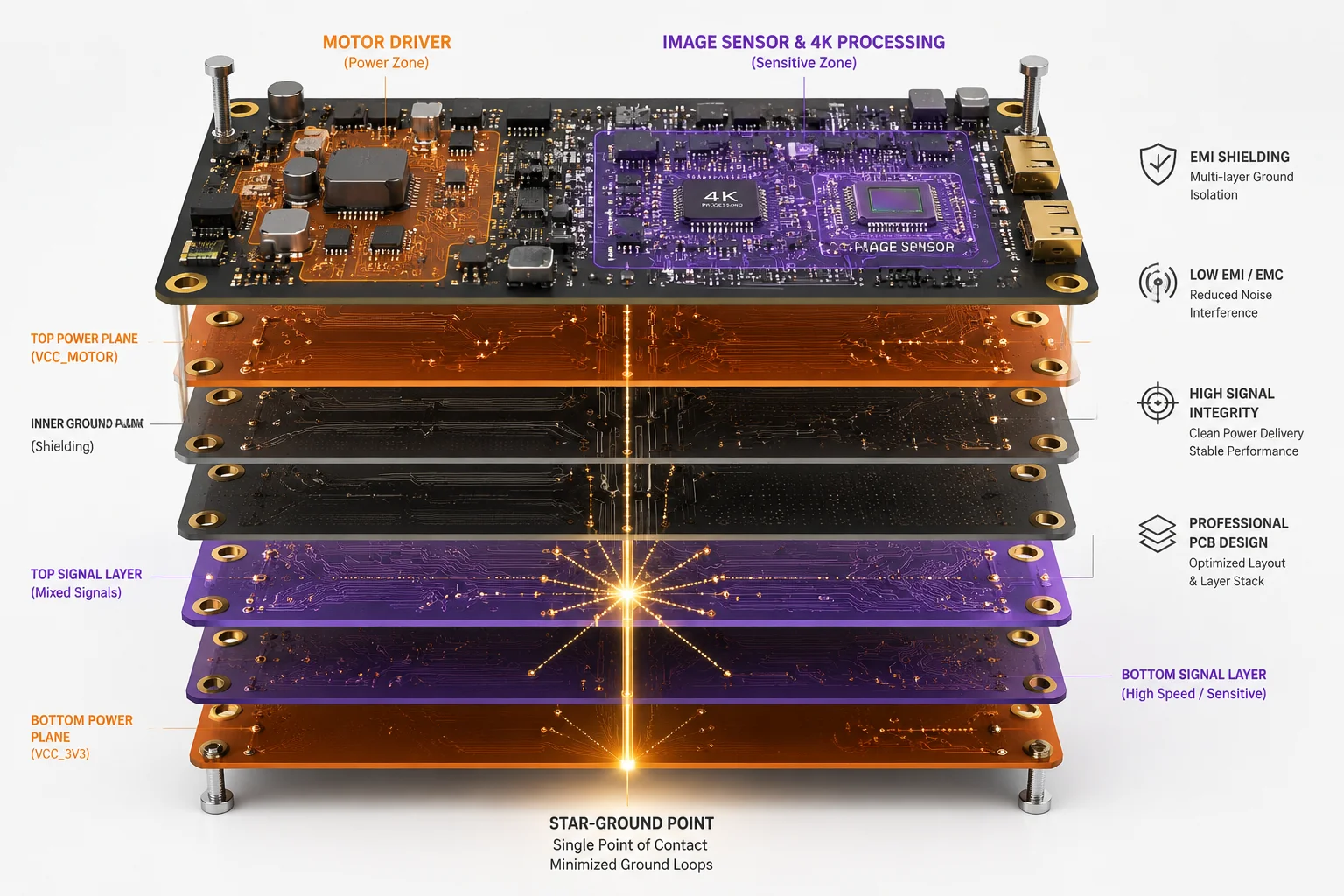
Sim. Nossa PCB usa planos de energia fisicamente separados com vazamentos de cobre dedicados para a seção do driver do motor, a seção do modem 4G e a seção de imagem. Cada seção tem seu próprio estágio de regulação, e os planos de terra são conectados em um único ponto de terra em estrela para evitar interferência de loop de terra.
 Trilhos de energia dedicados da PCB isolando motores do sensor 4K
Trilhos de energia dedicados da PCB isolando motores do sensor 4K
Por que o Isolamento do Trilho de Energia é Inegociável para 4K
Um sensor de imagem 4K opera com sinais analógicos extremamente pequenos. As tensões dos pixels sendo lidas estão na faixa de milivolts. Um driver de motor comutando a 20kHz gera interferência eletromagnética (EMI) que pode facilmente se acoplar a esses pequenos sinais. O resultado é ruído visível na imagem: faixas, exposição intermitente ou artefatos de cor.
A Arquitetura de PCB de Três Zonas
Nossa PCB é dividida em três zonas de energia distintas:
Zona 1: Energia do Motor Esta zona transporta os sinais ruidosos de alta corrente. O CI do driver do motor, os conectores do motor e os capacitores de desacoplamento residem aqui. As trilhas de cobre são largas (para lidar com 3-5A) e curtas (para minimizar a indutância). Esta zona tem seu próprio plano de terra que se conecta ao terra principal em um ponto específico.
Zona 2: Digital/Comunicação O modem 4G, SoC, memória e armazenamento residem aqui. Esta zona recebe energia limpa e regulada do PMIC. Possui seu próprio plano de terra. A linha de alimentação da antena 4G é roteada o mais longe possível da Zona 1.
Zona 3: Analógico/Imagem O sensor 4K, seu gerador de clock e o front-end analógico ficam aqui. Esta é a zona mais sensível. Recebe a energia mais limpa, muitas vezes através de um regulador LDO dedicado de ruído ultrabaixo. O plano de terra aqui é sólido e ininterrupto, sem trilhas digitais de alta velocidade cruzando-o.
Topologia de Terra em Estrela
O topologia de terra em estrela6 A abordagem significa que todas as três zonas conectam seus planos de terra em um único ponto perto do conector de entrada da bateria. A corrente de retorno do motor flui de volta através de seu próprio caminho dedicado e nunca passa sob o sensor ou modem.
Separação Física na Placa
Além do isolamento elétrico, mantemos distância física. O CI do driver do motor fica na extremidade oposta da PCB em relação ao sensor de imagem. O conector da antena do modem 4G fica em uma borda diferente da placa em relação aos conectores do motor. Isso reduz o acoplamento conduzido e irradiado.
Blindagem EMI
Em alguns de nossos modelos de ponta, adicionamos metal blindagem EMI7 (pequenas latas de estanho soldadas sobre seções sensíveis). O módulo do modem 4G geralmente tem sua própria blindagem. O circuito de clock do sensor de imagem pode ter uma blindagem. Isso bloqueia as emissões irradiadas do driver do motor de atingir componentes sensíveis através do ar.
David, para suas câmeras 40X capturando placas de licença a 200 metros, a qualidade da imagem é tudo. Uma linha de energia ruidosa degradaria sua resolução efetiva. Nosso isolamento de linha garante que o sensor 4K entregue quadros limpos e nítidos, independentemente do que os motores estejam fazendo.
Conclusão
A supressão de quedas de tensão em câmeras solares PTZ requer defesa em camadas: capacitores de desacoplamento para energia instantânea, soft-start em curva S para controle de corrente, regulação inteligente de PMIC para isolamento de módulo e intertravamento de fase para evitar sobreposição de picos. Cada camada protege a próxima.
1. Um conversor Buck-Boost pode aumentar ou diminuir a tensão, mantendo uma saída estável apesar da queda da tensão de entrada. ︎↩︎ 2. O PMIC integra múltiplos reguladores de tensão e funções de gerenciamento para diferentes subsistemas. ︎↩︎ 3. A aceleração em curva S aumenta suavemente a velocidade do motor ao longo do tempo, reduzindo picos de corrente. ︎↩︎ 4. O escalonamento dos tempos de partida do motor evita correntes de pico sobrepostas de múltiplos motores. ︎↩︎ 5. Capacitores de bulk armazenam energia para fornecer corrente instantaneamente durante a partida do motor, reduzindo a queda de tensão. ︎↩︎ 6. O aterramento em estrela conecta múltiplos planos de terra em um único ponto para evitar loops de terra. ︎↩︎ 7. Escudos EMI bloqueiam a interferência irradiada dos drivers do motor para proteger componentes sensíveis. ︎↩︎ 8. O LDO fornece tensão limpa e estável com mínima queda, isolando sensores sensíveis do ruído da rede. ︎↩︎ 9. O BMS monitora e protege a bateria; seu corte de descarga deve ser compatível com os limiares da câmera. ︎↩︎