
He visto una cámara PTZ solar 4G perfectamente estable reiniciarse a mitad de transmisión porque alguien presionó el botón de zoom 40X demasiado rápido. Ese único momento de caída de voltaje le costó a mi cliente una visita técnica a un sitio remoto.
El sistema suprime las caídas de voltaje mediante una combinación de condensadores de gran capacidad5 para el almacenamiento de energía instantáneo, algoritmos de arranque suave del motor con curva S que distribuyen el consumo de corriente a lo largo del tiempo, y reguladores Buck-Boost dedicados que aíslan módulos sensibles como el módem 4G y el SoC de las caídas de voltaje transitorias causadas por los picos del motor PTZ.
 Supresión de caídas de voltaje en cámaras PTZ durante el movimiento del motor de zoom
Supresión de caídas de voltaje en cámaras PTZ durante el movimiento del motor de zoom
A continuación, desgloso cada capa de este sistema de protección. Explicaré cómo el PMIC mantiene vivo su módem, por qué el paneo-inclinación-zoom simultáneo no interrumpirá su transmisión, cómo prevenimos apagados falsos y por qué el aislamiento de los rieles de alimentación de la PCB es importante para la calidad de imagen 4K.
Índice
¿Estabiliza el Circuito Integrado de Gestión de Energía (PMIC) el Voltaje para el Módem 4G Durante los Picos de PTZ?
He visto módems 4G perder su conexión LTE porque el motor de zoom robó suficiente voltaje durante el tiempo suficiente. Sucede en milisegundos, y el módem lo trata como un fallo de alimentación.
Sí. El PMIC utiliza un convertidor Buck-Boost1 de alta eficiencia para mantener un riel estable de 3.3V para el módem 4G, incluso cuando el voltaje de la batería principal cae durante el arranque del motor PTZ. Esta etapa de regulación dedicada actúa como un búfer entre la carga ruidosa del motor y el módulo celular sensible.
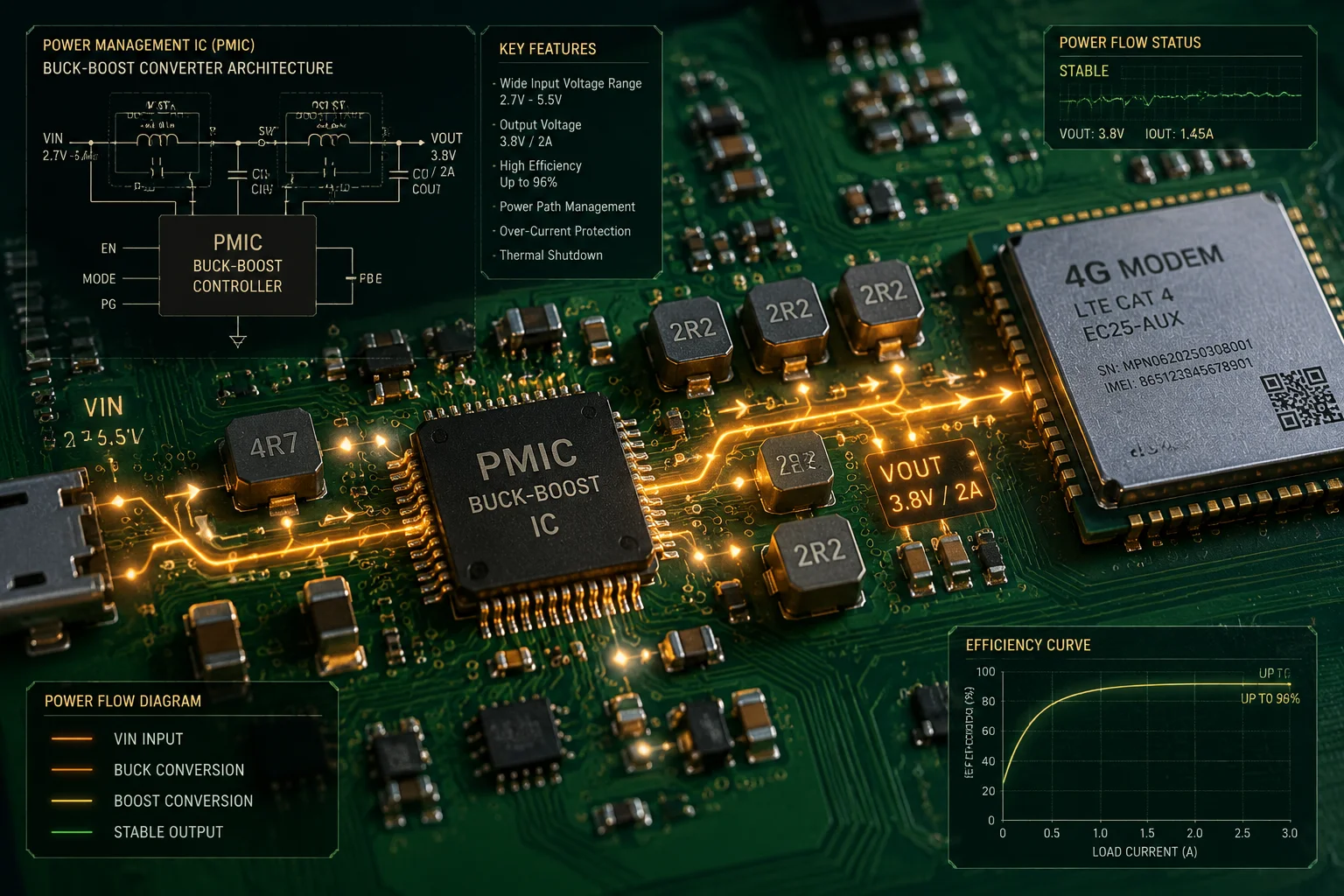 El PMIC estabiliza el voltaje para el módem 4G durante el pico de corriente del motor PTZ
El PMIC estabiliza el voltaje para el módem 4G durante el pico de corriente del motor PTZ
Cómo funciona realmente el PMIC en este contexto
A El Circuito Integrado de Gestión de Energía (PMIC)2 no es solo un regulador de voltaje único. En nuestro diseño de cámara PTZ, es un chip de salidas múltiples que toma la entrada de la batería (típicamente 12V) y crea varias salidas reguladas e independientes. Cada salida sirve a un subsistema diferente.
El módem 4G necesita una alimentación limpia y estable de 3.3V. El SoC necesita rieles de 1.2V y 1.8V. El controlador del motor necesita los 12V completos. El PMIC maneja todo esto a partir de una única fuente de entrada.
Por qué la topología Buck-Boost es importante
Un simple convertidor Buck (reductor) falla cuando el voltaje de entrada cae por debajo del voltaje de salida. Durante una operación de zoom intensa, el voltaje de la batería puede caer momentáneamente de 12V a 10V o incluso menos. Un convertidor Buck-Boost funciona en ambas direcciones. Puede reducir el voltaje cuando la batería está llena y aumentarlo cuando la batería se debilita. Esto significa que la salida de 3.3V se mantiene en 3.3V independientemente de lo que el motor esté haciendo en la línea principal.
La estrategia de desacoplamiento
Entre la salida del PMIC y la entrada del módem 4G, colocamos condensadores de desacoplamiento adicionales. Estos son pequeños condensadores cerámicos (típicamente de 10µF a 100µF) colocados físicamente cerca de los pines de alimentación del módem. Actúan como un filtro final, capturando cualquier ruido de alta frecuencia que pase a través del PMIC.
| Componente | Rol | Por qué es importante |
|---|---|---|
| PMIC Buck-Boost | Mantiene una salida estable en un amplio rango de entrada | Previene la caída de tensión del módem durante los picos del motor |
| Condensadores de desacoplamiento cerámicos | Filtra la ondulación de alta frecuencia en la entrada del módem | Detiene el EMI de la PWM del motor que llega al módem |
| Perla de ferrita | Bloquea el ruido conducido en la traza de alimentación | Aísla el ruido de conmutación del motor de la línea del módem |
| Circuito UVLO | Se apaga elegantemente por debajo del umbral seguro | Previene la corrupción de datos por energía inestable |
Validación en el mundo real
En nuestras pruebas, simulamos escenarios de peor caso. Comandamos un zoom de 40X a toda velocidad mientras la batería está al 30% de carga y el módem 4G está a mitad de carga. Monitorizamos la línea de alimentación del módem con un osciloscopio. La ondulación aceptable es inferior a 50mV pico a pico. Si excede ese valor, el módem puede perder paquetes o perder el registro con la torre celular.
David, para tus implementaciones en América del Norte, esto significa que tu cámara sigue transmitiendo incluso cuando un operador de seguridad se acerca rápidamente a una matrícula. El módem nunca ve el caos de voltaje que ocurre en el lado del motor de la placa.
¿Parpadeará o se Reiniciará Mi Transmisión de Video si Muevo el Zoom y la Inclinación al Mismo Tiempo?
Un cliente me llamó frustrado porque cada vez que su operador panoraba y hacía zoom simultáneamente, la transmisión en vivo se congelaba durante dos segundos. Pensó que la cámara estaba rota. No lo estaba. El sistema de alimentación simplemente estaba mal diseñado.
No. Nuestro firmware utiliza un intercalado de fase4 estrategia que escalona el arranque de los motores en 20-50 milisegundos, evitando un consumo de corriente pico simultáneo. Combinado con el almacenamiento en búfer del condensador, el codificador de video y el módem 4G mantienen una alimentación ininterrumpida incluso durante comandos PTZ multieje agresivos.
 Estabilidad de la transmisión de video durante el movimiento simultáneo de paneo, inclinación y zoom
Estabilidad de la transmisión de video durante el movimiento simultáneo de paneo, inclinación y zoom
Entendiendo el problema del “doble pico”
Cada eje PTZ tiene su propio motor. El motor de paneo, el motor de inclinación y el motor de zoom pueden recibir comandos al mismo tiempo. Si los tres comienzan a moverse en el mismo instante exacto, sus corrientes de arranque se suman. Un solo motor puede consumir 2A al arrancar. Tres motores arrancando juntos consumen 6A. En un sistema de batería solar clasificado para 8A continuos, ese pico de 6A además de la línea base de 2A (SoC + módem + sensor) lleva el sistema a su límite.
Cómo el intercalado de fase resuelve esto
El firmware nunca arranca todos los motores en el mismo milisegundo. Cuando llega un comando de “ir a preajuste” que requiere movimiento de paneo, inclinación y zoom, el sistema los pone en cola:
- T = 0ms: El motor de paneo comienza la rampa de arranque suave
- T = 30ms: El motor de inclinación comienza la rampa de arranque suave
- T = 60ms: El motor de zoom comienza la rampa de arranque suave
Para cuando el motor de zoom comienza a consumir corriente, el motor de paneo ya ha pasado su fase pico de arranque y se ha estabilizado en la corriente de funcionamiento en estado estable. Los picos nunca se superponen.
El perfil de aceleración de curva S
Incluso dentro del arranque de cada motor, la corriente no salta instantáneamente. El firmware utiliza un perfil de aceleración de curva S3. Piense en ello como un coche que acelera suavemente desde parado en lugar de pisar a fondo el pedal del acelerador. El ciclo de trabajo PWM aumenta siguiendo una función sigmoide. Esto distribuye el consumo de corriente en 50-100 milisegundos en lugar de alcanzar el pico en menos de 5 milisegundos.
Qué sucede con el pipeline de video
El codificador de video (dentro del SoC) tiene su propio dedicado regulador de baja caída (LDO)8. Incluso si la línea principal de 5V cae ligeramente, el LDO absorbe esa variación y emite un 1.8V limpio al núcleo del codificador. El sensor 4K también se encuentra detrás de su propio regulador. Por lo tanto, la canalización de imagen está doblemente aislada del ruido del motor.
El resultado: sin caídas de fotogramas, sin reinicios del codificador, sin interrupciones de la transmisión. El operador ve un video fluido y continuo mientras controla movimientos complejos de PTZ.
Pruebas de escenario de peor caso
Probamos esto mediante la creación de secuencias de recorridos preestablecidos rápidos. La cámara cicla entre 8 preajustes con tiempo de permanencia cero, forzando un movimiento constante multieje. Ejecutamos esta prueba durante 72 horas seguidas con alimentación de batería. Si la transmisión se interrumpe incluso una vez, el equipo de firmware ajusta el tiempo de intercalación o aumenta la duración de la rampa de arranque suave.
¿Cómo Evitan que la “Caída de Voltaje” de la Batería Cause un Apagado Falso por “Baja Potencia”?
Una vez depuré un sistema que seguía apagándose con “batería de 40%”. La batería estaba bien. El BMS estaba leyendo el voltaje caído durante el movimiento del motor y entrando en pánico. Pensó que la batería estaba muerta cuando en realidad estaba simplemente bajo una carga pesada.
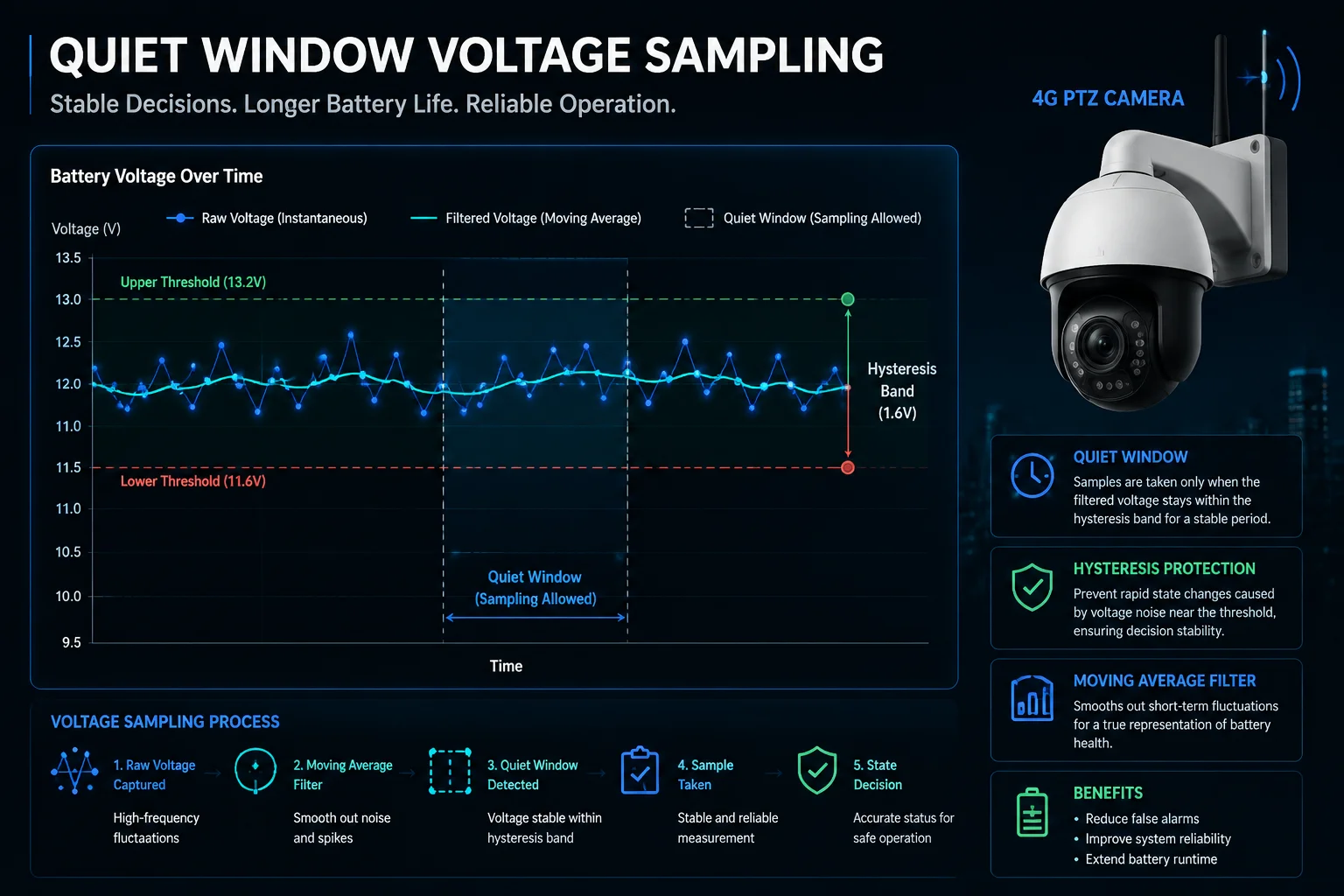
Evitamos apagados falsos muestreando el voltaje de la batería solo durante los períodos de inactividad del motor, aplicando un filtro de promedio móvil a las lecturas de voltaje y estableciendo el umbral de baja potencia con una banda de histéresis que tiene en cuenta la caída esperada bajo carga. El sistema distingue entre batería baja genuina y caída temporal de voltaje.
 Prevención de caída de voltaje de batería, apagado falso por baja potencia, cámara PTZ
Prevención de caída de voltaje de batería, apagado falso por baja potencia, cámara PTZ
La causa raíz de los apagados falsos
El voltaje terminal de una batería de litio cae bajo carga. Esto es física normal. La batería tiene resistencia interna. Cuando la corriente fluye a través de esa resistencia, el voltaje cae (ley de Ohm: V = I × R). Una batería que muestra 12.0V en reposo podría mostrar 11.2V cuando entrega 5A a los motores. Si el firmware lee el voltaje durante esa extracción de 5A y lo compara con un umbral estático (por ejemplo, 11.0V = apagado), podría activar una falsa alarma.
Muestreo inteligente de voltaje
Nuestro firmware utiliza una técnica que llamo “muestreo de ventana silenciosa”. El sistema sabe cuándo los motores están activos porque los comanda. Por lo tanto, solo toma lecturas de voltaje de la batería durante los períodos en que ningún motor se está moviendo. Si la cámara está en movimiento continuo (como durante un recorrido de patrulla), el firmware espera la breve pausa entre las transiciones preestablecidas para obtener una muestra de voltaje limpia.
La banda de histéresis
| Estado de la batería | Umbral de Voltaje | Acción |
|---|---|---|
| Operación Normal | Por encima de 11.5V (en reposo) | Todos los sistemas activos |
| Advertencia de baja potencia | Por debajo de 11.5V durante 30 segundos | Reducir tareas no esenciales |
| Crítico bajo | Por debajo de 10.8V durante 60 segundos | Secuencia de apagado elegante |
| Recuperación | Por encima de 12.0V durante 10 segundos | Reanudar operación normal |
Observe la diferencia entre el umbral de apagado (10.8V) y el umbral de recuperación (12.0V). Esto es histéresis. Evita que el sistema cambie rápidamente entre apagado y recuperación.
Filtro de Media Móvil
El firmware mantiene un promedio móvil de las últimas 10 muestras de voltaje, cada una tomada con 5 segundos de diferencia durante las ventanas de inactividad. Una sola lectura baja no activa nada. El promedio debe permanecer por debajo del umbral durante un período sostenido. Esto elimina disparos falsos de eventos transitorios breves.
Coordinación del BMS
Para las instalaciones de David que utilizan paquetes de baterías externas, recomendamos un Sistema de Gestión de Baterías (BMS)9 con un corte de descarga no superior a 10.0V (para un sistema de 12V). Esto le da a la lógica interna de la cámara espacio para gestionar un apagado elegante antes de que el BMS corte la energía de forma abrupta. Si el umbral del BMS se establece demasiado cerca del umbral de la propia cámara, se produce una condición de carrera en la que ambos intentan apagarse al mismo tiempo, lo que podría dañar las grabaciones almacenadas.
El Requisito de Descarga de 10A
David, esto es crítico para tus cámaras 40X. El BMS debe admitir al menos 10A de descarga instantánea. Muchos controladores de baterías solares listos para usar tienen una capacidad nominal de 3-5A. Eso está bien para una cámara estática. Pero una PTZ 40X con paneo, inclinación, zoom e iluminador infrarrojo puede consumir brevemente 8-9A. Si tu BMS no puede manejar eso, cortará la energía y culparás a la cámara. La cámara está bien. El BMS es el cuello de botella.
¿Existen Rieles de Alimentación Dedicados en la PCB para Aislar los Motores Ruidosos del Sensor 4K?
Aprendí esta lección al principio de mi carrera. Una única traza de alimentación compartida entre un motor paso a paso y un sensor de imagen creaba bandas horizontales en cada fotograma. El ruido se conducía directamente a través del plano de alimentación a los circuitos analógicos del sensor.
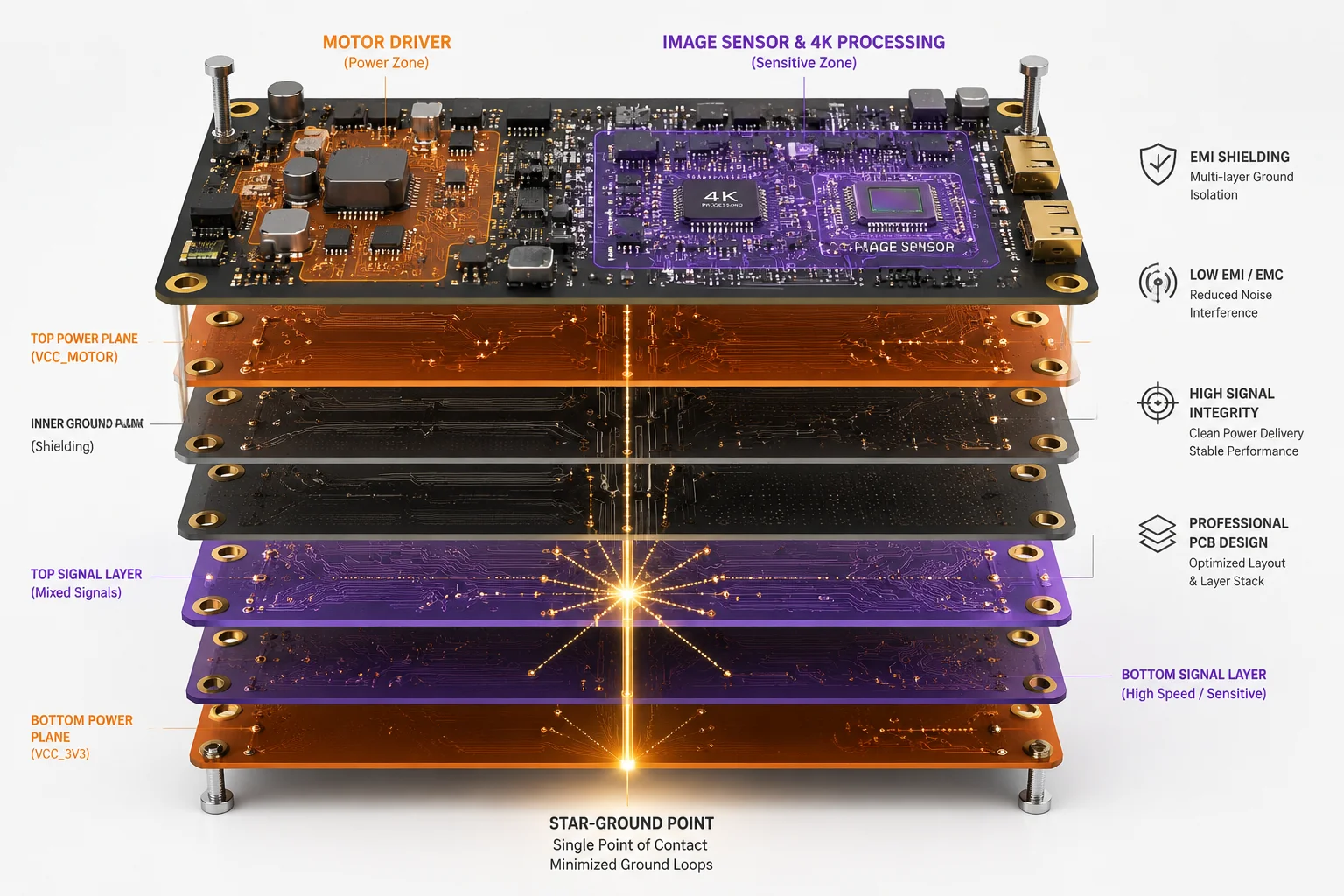
Sí. Nuestra PCB utiliza planos de alimentación físicamente separados con vertidos de cobre dedicados para la sección del controlador del motor, la sección del módem 4G y la sección de imagen. Cada sección tiene su propia etapa de regulación, y los planos de tierra están conectados en un único punto de tierra en estrella para evitar interferencias de bucle de tierra.
 Rieles de alimentación dedicados en la PCB que aíslan los motores del sensor 4K
Rieles de alimentación dedicados en la PCB que aíslan los motores del sensor 4K
Por qué el Aislamiento de Rieles de Alimentación es Innegociable para 4K
Un sensor de imagen 4K opera con señales analógicas extremadamente pequeñas. Los voltajes de los píxeles que se leen están en el rango de milivoltios. Un controlador de motor que conmuta a 20 kHz genera interferencia electromagnética (EMI) que puede acoplarse fácilmente a esas pequeñas señales. El resultado es ruido visible en la imagen: bandas, parpadeo de exposición o artefactos de color.
La Arquitectura de PCB de Tres Zonas
Nuestra PCB se divide en tres zonas de alimentación distintas:
Zona 1: Alimentación del Motor Esta zona transporta las señales ruidosas de alta corriente. El CI del controlador del motor, los conectores del motor y los condensadores de gran tamaño se encuentran aquí. Las pistas de cobre son anchas (para manejar 3-5A) y cortas (para minimizar la inductancia). Esta zona tiene su propio plano de tierra que se conecta a la tierra principal en un punto específico.
Zona 2: Digital/Comunicación El módem 4G, SoC, memoria y almacenamiento se encuentran aquí. Esta zona recibe alimentación limpia y regulada del PMIC. Tiene su propio plano de tierra. La línea de alimentación de la antena 4G se enruta lo más lejos posible de la Zona 1.
Zona 3: Analógico/Imagen El sensor 4K, su generador de reloj y el front-end analógico se encuentran aquí. Esta es la zona más sensible. Recibe la alimentación más limpia, a menudo a través de un regulador LDO dedicado de ultra bajo ruido. El plano de tierra aquí es sólido e ininterrumpido, sin pistas digitales de alta velocidad que lo crucen.
Topología de Tierra en Estrella
En topología de tierra en estrella6 significa que las tres zonas conectan sus planos de tierra en un único punto cerca del conector de entrada de la batería. La corriente de retorno del motor fluye de regreso a través de su propio camino dedicado y nunca pasa por debajo del sensor o del módem.
Separación Física en la Placa
Más allá del aislamiento eléctrico, mantenemos la distancia física. El CI del controlador del motor se encuentra en el extremo opuesto de la PCB al sensor de imagen. El conector de la antena del módem 4G está en un borde diferente de la placa que los conectores del motor. Esto reduce el acoplamiento conducido y radiado.
Blindaje EMI
En algunos de nuestros modelos de gama alta, añadimos metal blindaje EMI7 (pequeñas latas de estaño soldadas sobre secciones sensibles). El módulo del módem 4G a menudo tiene su propio blindaje. El circuito de reloj del sensor de imagen puede tener un blindaje. Estos bloquean las emisiones radiadas del controlador del motor para que no lleguen a componentes sensibles a través del aire.
David, para tus cámaras 40X que capturan matrículas a 200 metros, la calidad de imagen es primordial. Un riel de alimentación ruidoso degradaría tu resolución efectiva. Nuestro aislamiento de rieles garantiza que el sensor 4K ofrezca fotogramas limpios y nítidos independientemente de lo que hagan los motores.
Conclusión
La supresión de caídas de voltaje en cámaras solares PTZ requiere una defensa en capas: condensadores de gran tamaño para energía instantánea, arranque suave en curva S para control de corriente, regulación inteligente del PMIC para aislamiento de módulos y entrelazado de fases para evitar la superposición de picos. Cada capa protege a la siguiente.
1. Un convertidor Buck-Boost puede aumentar o disminuir el voltaje, manteniendo una salida estable a pesar de la caída del voltaje de entrada. ︎↩︎ 2. El PMIC integra múltiples reguladores de voltaje y funciones de gestión para diferentes subsistemas. ︎↩︎ 3. La aceleración en curva S aumenta suavemente la velocidad del motor con el tiempo, reduciendo los picos de corriente. ︎↩︎ 4. El escalonamiento de los tiempos de arranque del motor evita la superposición de corrientes pico de múltiples motores. ︎↩︎ 5. Los condensadores de gran capacidad almacenan energía para suministrar corriente instantáneamente durante el arranque del motor, reduciendo la caída de voltaje. ︎↩︎ 6. La tierra en estrella conecta múltiples planos de tierra en un único punto para evitar bucles de tierra. ︎↩︎ 7. Los blindajes EMI bloquean la interferencia radiada de los controladores del motor para proteger los componentes sensibles. ︎↩︎ 8. El LDO proporciona un voltaje limpio y estable con una caída mínima, aislando los sensores sensibles del ruido de la línea. ︎↩︎ 9. El BMS monitorea y protege la batería; su corte de descarga debe ser compatible con los umbrales de la cámara. ︎↩︎