
Vejo frequentemente equipas a perder confiança quando uma câmara PTZ se move e as regras parecem deixar de fazer sentido. Quero que as minhas linhas de vedação permaneçam exatamente onde o mundo real está.
Sim, regras ligadas a predefinições7 pode alternar automaticamente, mas a verdadeira mudança automática requer uma câmara que suporte mapeamento dinâmico de coordenadas8. A maioria dos sistemas PTZ mantém as regras ligadas a predefinições, enquanto os sistemas de ponta conseguem rastrear alterações de pan, tilt e zoom e manter as linhas virtuais alinhadas.
 mapeamento de perímetro virtual e regras PTZ
mapeamento de perímetro virtual e regras PTZ
Quando comparo projetos reais, vejo dois resultados muito diferentes. Alguns sistemas só funcionam bem em posições predefinidas. Outros mantêm as regras ligadas à cena mesmo enquanto a lente se move, mas isso requer hardware melhor, firmware mais inteligente e boa calibração.
Índice
O “Mapeamento Global de Coordenadas” garante que as minhas linhas de vedação permaneçam alinhadas com o mundo físico?
Tenho visto esta questão surgir muitas vezes, porque ninguém quer uma vedação virtual que se afaste do portão. Quero que a linha permaneça na estrada, na vedação ou no quintal, não que se desvie pelo ecrã.
O Mapeamento Global de Coordenadas pode manter as linhas de vedação alinhadas com o mundo físico se a câmara tiver feedback de posição real, boa calibração e um motor de mapeamento robusto. Não é apenas uma ferramenta de desenho. É uma forma de ligar cada regra a uma posição espacial fixa.
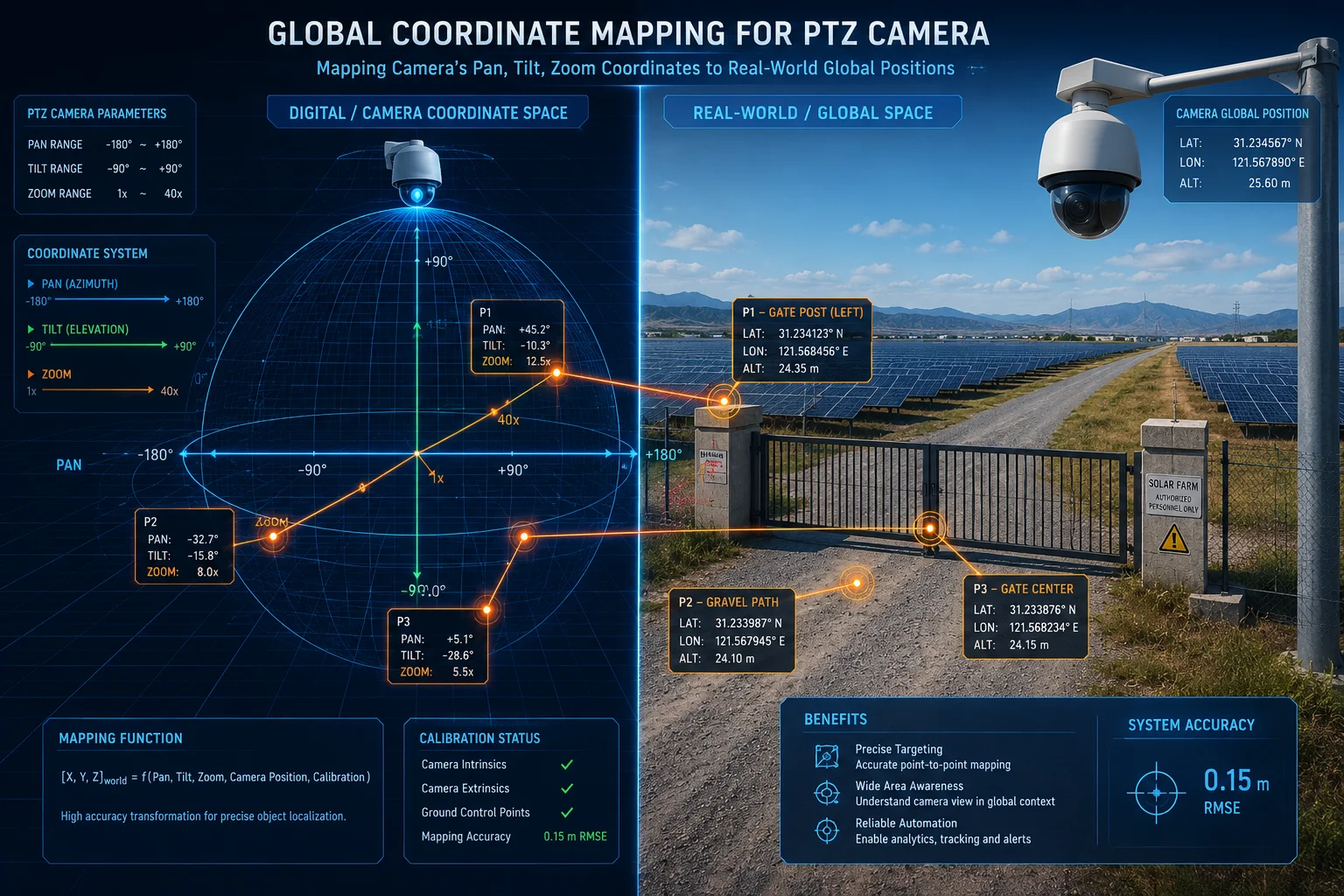 mapeamento de coordenadas globais para regras PTZ
mapeamento de coordenadas globais para regras PTZ
Penso que o ponto chave é simples: o mapeamento global é tão bom quanto os dados por trás dele. Se a câmara souber o seu ângulo de pan, ângulo de tilt, nível de zoom1 e ponto de origem com precisão suficiente, pode projetar a mesma regra em cada nova vista. É por isso que a linha pode parecer “mover-se” no ecrã, mas na verdade está a permanecer no mesmo local do mundo real. Na prática, isto significa que posso desenhar uma vedação virtual uma vez e depois deixar a câmara continuar a atualizar o lado da imagem dessa vedação à medida que a lente gira. Mas também preciso de ter cuidado. Pequenos erros mecânicos, engrenagens soltas, codificadores fracos ou má calibração de fábrica podem quebrar a correspondência entre a imagem e o solo. Se o sistema perder a sua referência, a linha pode desviar-se um pouco no início e muito mais tarde. É por isso que sempre trato esta funcionalidade como uma mistura de software e mecânica. O software pode mapear o mundo. O hardware tem de dizer a verdade sobre onde a lente está a apontar. Para um projeto como um local solar 4G ou um portão de quinta amplo, isto importa ainda mais porque a câmara pode mover-se muitas vezes por dia.
O que verifico antes de confiar num sistema de mapeamento
| Item de verificação | Por que é importante | O que eu quero ver |
|---|---|---|
| Feedback de Pan/Tilt | A câmera deve saber sua posição exata | Encoder estável ou controle de posição forte |
| Feedback de Zoom | A forma da regra muda com o campo de visão | Relatório preciso de zoom |
| Posição inicial | O sistema precisa de um ponto base fixo | Comportamento confiável de retorno à posição inicial |
| Processo de calibração | O mapeamento deve corresponder à cena real | Configuração simples, mas repetível |
| Controle de desvio a longo prazo | As regras devem permanecer corretas ao longo do tempo | Suporte a verificação automática ou recalibração |
As regras virtuais serão recalibradas instantaneamente após um movimento manual PTZ ou chamada de predefinição?
Eu sei que isso pode parecer arriscado quando movo uma PTZ manualmente e depois espero que as regras acompanhem. Não quero atraso, pois um atraso pode significar eventos perdidos ou alarmes falsos.
Em um sistema bem projetado, as regras podem ser atualizadas logo após uma chamada de preset, mas o movimento manual da PTZ é menos confiável. Movimentos de preset são mais fáceis de rastrear porque a câmera sabe o ponto de destino, enquanto movimentos manuais podem precisar de um novo ponto de bloqueio ou uma etapa curta de ressincronização.
 Recalibração de regras de preset PTZ
Recalibração de regras de preset PTZ
Eu geralmente divido isso em dois casos. O primeiro caso é o movimento de preset para preset. Este é o caminho mais limpo. A câmera já sabe onde estão o preset 1, o preset 2 e o preset 3. Portanto, quando chamo um preset, o firmware pode alternar as regras relacionadas ou reprojetar a cerca de mapeada quase instantaneamente. O segundo caso é o movimento manual por joystick, aplicativo ou controle VMS. Aqui, o sistema pode não saber se parei em um local válido, se passei por uma zona cega ou se o zoom mudou durante o movimento. Portanto, algumas câmeras esperam até que o movimento pare e, em seguida, recarregam os dados espaciais. Algumas câmeras atualizam apenas após um curto atraso. Algumas câmeras não atualizam bem, a menos que o operador envie a câmera de volta para um preset conhecido. É por isso que sempre pergunto ao fornecedor como o dispositivo lida com controle ao vivo, chamadas de preset e rotas de patrulha. Também pergunto se a recalibração ocorre a cada movimento ou apenas no retorno à posição inicial. Para trabalhos B2B, esse detalhe é importante porque o cliente não se importa com a teoria. O cliente se importa se a regra permanece ativa quando o guarda aperta “home”, “preset 5” ou uma varredura manual.
Comportamento típico após movimento
| Tipo de movimento | Velocidade de atualização da regra | Nível de risco | Minha visão prática |
|---|---|---|---|
| Chamada de preset | Rápido | Baixa | Melhor para alternância de regras estável |
| Tour de patrulha | Médio a rápido | Médio | Precisa de boa lógica de firmware |
| Movimento manual com joystick | Varia | Mais alto | Frequentemente precisa de resincronização |
| Retornar para casa | Rápido e estável | Baixa | Melhor momento para recalibração |
Como é que se previne o “Desvio de Regras” após milhares de ciclos de pan e tilt?
Eu me preocupo com o desvio em qualquer sistema em movimento, porque pequenos erros podem crescer com o tempo. Uma câmera pode parecer boa no primeiro dia e ainda se tornar um problema após muitas semanas de movimento.
O desvio de regra é evitado por um projeto mecânico robusto, encoders precisos, correção regular da posição inicial e, às vezes, calibração automática visual. O objetivo é manter o mapa de software vinculado ao ângulo real da lente a longo prazo.
 Prevenindo o desvio de regra PTZ
Prevenindo o desvio de regra PTZ
Eu vejo o desvio de regra como uma perda lenta de confiança entre a câmera e o mundo. A câmera ainda pode se mover, mas sua ideia interna de onde ela aponta não corresponde mais à cena real. Isso pode acontecer devido ao desgaste da engrenagem, vibração, mudança de temperatura, ciclos de patrulha repetidos ou calibração fraca. Para combater isso, quero mais de uma camada de proteção. Primeiro, quero um bom motor e um sólido codificador3. Se a câmera não consegue medir bem sua própria posição, nenhum software pode salvá-la. Segundo, quero um claro posição inicial2 que o dispositivo pode retornar com frequência. Isso dá ao sistema um ponto fixo para comparar. Terceiro, quero que o firmware suporte autoverificações periódicas. Alguns sistemas podem comparar marcos visuais, como postes, paredes ou cantos de portões, e então corrigir pequenos desvios. Quarto, quero que a equipe de instalação teste o dispositivo sob estresse de movimento real, não apenas em um laboratório. Para uma PTZ solar em um local remoto, isso importa ainda mais, pois a câmera pode funcionar o dia todo, enfrentar o vento e continuar girando no modo de patrulha. Também pergunto se o fornecedor tem um limite de desvio6, um método de redefinição para zero ou um intervalo de manutenção. Estas são perguntas simples, mas me dizem se o produto é construído para uso prolongado ou apenas para uma demonstração.
Minha lista de verificação de controle de desvio
| Método de controle | O que faz | Minha observação |
|---|---|---|
| Feedback do codificador | Rastreia a posição da lente | Deve ser preciso |
| Retorno à posição inicial | Relocaliza o ponto base | Muito importante |
| Recalibração visual | Usa marcos da cena | Útil para estabilidade a longo prazo |
| Teste de limite de patrulha | Estressa o sistema de movimento | Ajuda a expor um design fraco |
| Intervalo de manutenção | Mantém o sistema honesto | Melhor para locais remotos |
Esta funcionalidade é compatível com plataformas VMS de terceiros como Milestone ou Blue Iris?
Sempre me preocupo com a adequação da plataforma, porque mesmo uma câmera forte pode se tornar um produto ruim se não puder ingressar no sistema que o cliente já usa.
A compatibilidade depende se o VMS pode ler os dados PTZ e metadados da câmera. Se a câmera suportar ONVIF, RTSP e as mensagens de evento ou regra corretas, as plataformas de terceiros podem funcionar bem, mas o mapeamento dinâmico avançado nem sempre é totalmente exposto.
 Compatibilidade de VMS de terceiros para regras PTZ
Compatibilidade de VMS de terceiros para regras PTZ
Eu trato o suporte de VMS como duas perguntas separadas. A primeira pergunta é vídeo e controle básicos. A câmera pode transmitir vídeo? O VMS pode mover a lente? Ele pode chamar predefinições? Se a resposta for sim, o projeto geralmente pode avançar. A segunda pergunta é inteligência de regras. O VMS pode entender o perímetro virtual, o mapa em movimento, o conjunto de regras vinculado à predefinição ou os dados de coordenadas dinâmicas? Esta parte é muito mais difícil. Algumas plataformas VMS veem a câmera apenas como uma fonte de vídeo e um dispositivo PTZ. Eles não entendem totalmente as posições de regras que mudam com o pan, tilt e zoom. Nesse caso, a câmera ainda pode funcionar, mas o recurso de regra inteligente pode permanecer dentro da própria câmera. É por isso que sempre peço um teste com o VMS exato que o cliente usa. Marco4 e Íris Azul5 ambos podem ser úteis, mas a resposta real depende do modelo, firmware, suporte de protocolo e como a câmera envia metadados. Para integradores de sistemas, isso é um grande problema porque um projeto pode falhar na última etapa se a câmera e o VMS não falarem a mesma língua. Acho que o caminho mais seguro é verificar o suporte ao perfil ONVIF, mapeamento de comandos PTZ, tratamento de eventos e exibição de regras antes de um pedido em massa.
O que verifico com um teste de VMS
| Ponto de teste | Por que eu o testo | Bom resultado |
|---|---|---|
| Transmissão de vídeo ao vivo | Conexão básica | Vídeo estável com baixo atraso |
| controle PTZ | Movimento remoto | Controle suave de predefinição e manual |
| Saída de evento | Lógica de alarme | Eventos aparecem a tempo |
| Suporte a metadados | Regras inteligentes | Os dados são legíveis pelo VMS |
| Exibição de regras | Confiança do operador | As regras permanecem visíveis e utilizáveis |
Conclusão
Confio em regras vinculadas a predefinições para trabalhos simples, mas confio em mapeamento e calibração dinâmicos apenas quando o hardware, firmware e VMS da câmera o suportam bem.
1. Referência para os fundamentos das coordenadas PTZ e como elas afetam o posicionamento das regras. ︎↩︎ 2. Leia sobre o uso de uma posição inicial fixa como referência para recalibração. ︎↩︎ 3. Informações sobre codificadores rotativos usados para medir a posição da lente PTZ. ︎↩︎ 4. Veja como o Milestone XProtect integra câmeras PTZ de terceiros com regras virtuais. ︎↩︎ 5. Revise os recursos do Blue Iris para manipulação de regras PTZ e análise de metadados. ︎↩︎ 6. Verifique os limites de desvio especificados pelo fabricante para precisão PTZ a longo prazo. ︎↩︎ 7. Entenda como as posições predefinidas ativam automaticamente regras virtuais específicas. ︎↩︎ 8. Aprenda como o mapeamento dinâmico de coordenadas mantém as linhas virtuais alinhadas durante o movimento PTZ. ︎↩︎