
A menudo veo que los equipos pierden la confianza cuando una cámara PTZ se mueve y las reglas parecen dejar de tener sentido. Quiero que mis líneas de valla permanezcan exactamente donde está el mundo real.
Sí, reglas vinculadas a preajustes7 puede cambiar automáticamente, pero el cambio automático real necesita una cámara que admita mapeo de coordenadas dinámico8. La mayoría de los sistemas PTZ mantienen las reglas vinculadas a los preajustes, mientras que los sistemas de gama alta pueden rastrear los cambios de paneo, inclinación y zoom y mantener las líneas virtuales alineadas.
 Mapeo de perímetro virtual y reglas PTZ
Mapeo de perímetro virtual y reglas PTZ
Cuando comparo proyectos reales, veo dos resultados muy diferentes. Algunos sistemas solo funcionan bien en posiciones preestablecidas. Otros mantienen las reglas adjuntas a la escena incluso mientras la lente se mueve, pero eso requiere hardware mejor, firmware más inteligente y una buena calibración.
Índice
¿El “Mapeo de Coordenadas Globales” garantiza que mis líneas de valla permanezcan alineadas con el mundo físico?
He visto que esta pregunta surge mucho, porque nadie quiere una valla virtual que se aleje de la puerta. Quiero que la línea permanezca en la carretera, la valla o el patio, no que se desplace por la pantalla.
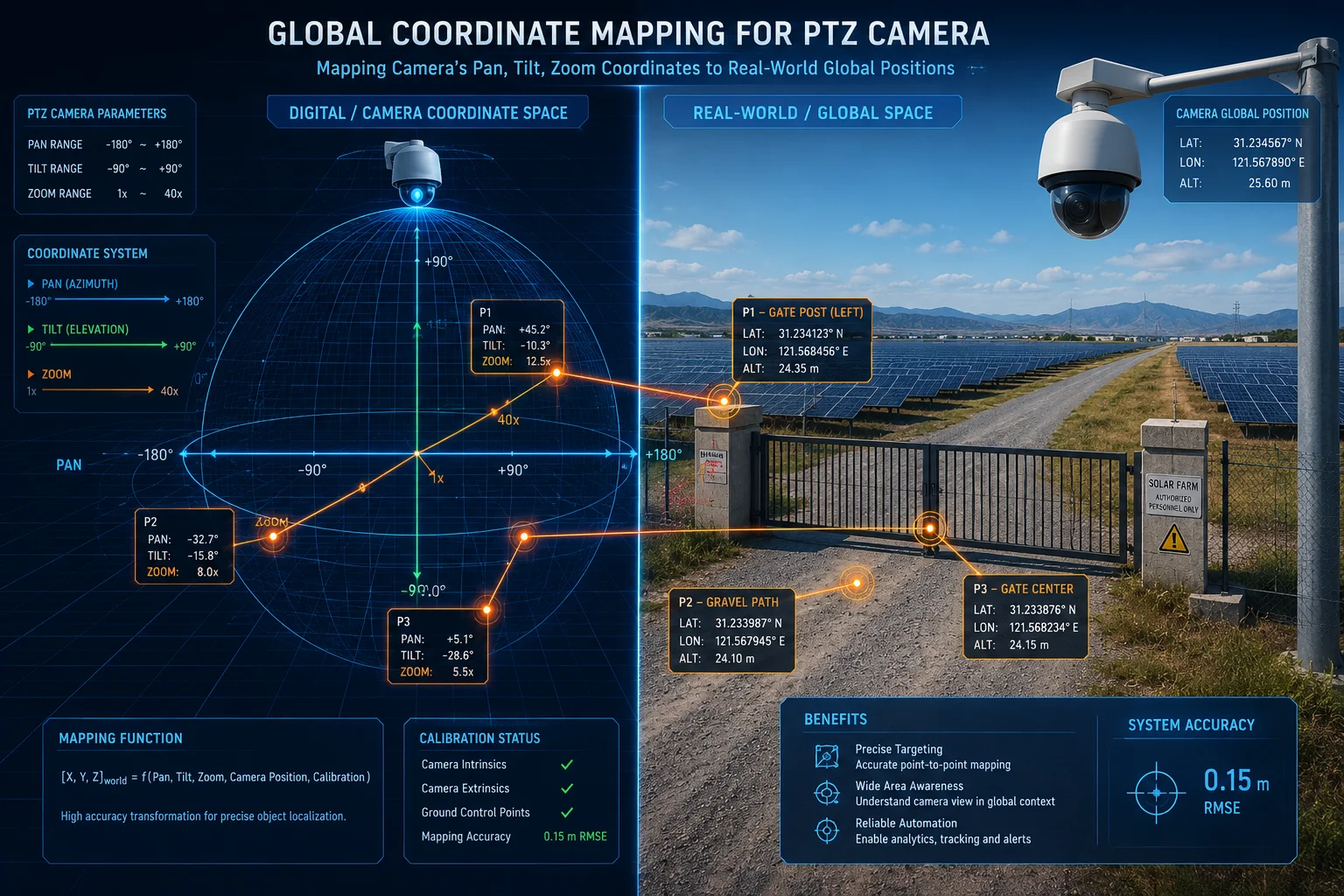
El mapeo de coordenadas globales puede mantener las líneas de valla alineadas con el mundo físico si la cámara tiene retroalimentación de posición real, buena calibración y un motor de mapeo potente. No es solo una herramienta de dibujo. Es una forma de vincular cada regla a una posición espacial fija.
 Mapeo de coordenadas globales para reglas PTZ
Mapeo de coordenadas globales para reglas PTZ
Creo que el punto clave es simple: el mapeo global es tan bueno como los datos que lo respaldan. Si la cámara conoce su ángulo de paneo, ángulo de inclinación, nivel de zoom1 y punto de origen con suficiente precisión, puede proyectar la misma regla en cada nueva vista. Es por eso que la línea puede parecer que “se mueve” en la pantalla, pero en realidad permanece en el mismo lugar del mundo real. En la práctica, esto significa que puedo dibujar una valla virtual una vez y luego dejar que la cámara actualice el lado de la imagen de esa valla a medida que la lente gira. Pero también debo tener cuidado. Pequeños errores mecánicos, engranajes sueltos, codificadores débiles o una mala calibración de fábrica pueden romper la coincidencia entre la imagen y el suelo. Si el sistema pierde su referencia, la línea puede desviarse un poco al principio y mucho después. Es por eso que siempre trato esta característica como una combinación de software y mecánica. El software puede mapear el mundo. El hardware debe decir la verdad sobre hacia dónde apunta la lente. Para un proyecto como un sitio solar 4G o una puerta de granja amplia, esto importa aún más porque la cámara puede moverse muchas veces al día.
Lo que compruebo antes de confiar en un sistema de mapeo
| Elemento de comprobación | Por qué importa | Lo que quiero ver |
|---|---|---|
| Retroalimentación de Pan/Tilt | La cámara debe conocer su posición exacta | Codificador estable o control de posición fuerte |
| Retroalimentación de zoom | La forma de la regla cambia con el campo de visión | Informes de zoom precisos |
| Posición de inicio | El sistema necesita un punto base fijo | Comportamiento fiable de retorno al inicio |
| Proceso de calibración | El mapeo debe coincidir con la escena real | Configuración sencilla pero repetible |
| Control de deriva a largo plazo | Las reglas deben permanecer correctas con el tiempo | Soporte de autocomprobación o recalibración |
¿Se recalibrarán instantáneamente las reglas virtuales después de un movimiento manual de PTZ o una llamada preestablecida?
Sé que esto puede parecer arriesgado cuando muevo una PTZ manualmente y luego espero que las reglas sigan el ritmo. No quiero un retraso, porque un retraso puede significar eventos perdidos o falsas alarmas.
En un sistema bien diseñado, las reglas se pueden actualizar justo después de una llamada a un preset, pero el movimiento manual de la PTZ es menos fiable. Los movimientos de preset son más fáciles de seguir porque la cámara conoce el punto de destino, mientras que los movimientos manuales pueden necesitar un nuevo punto de bloqueo o un breve paso de resincronización.
 Recalibración de reglas de preset PTZ
Recalibración de reglas de preset PTZ
Normalmente divido esto en dos casos. El primer caso es el movimiento de preset a preset. Este es el camino más limpio. La cámara ya sabe dónde están el preset 1, el preset 2 y el preset 3. Así que cuando llamo a un preset, el firmware puede cambiar las reglas relacionadas o reproyectar la valla mapeada casi al instante. El segundo caso es el movimiento manual por joystick, aplicación o control VMS. Aquí, el sistema puede no saber si me detuve en un lugar válido, si pasé por una zona ciega o si el zoom cambió durante el movimiento. Por lo tanto, algunas cámaras esperan hasta que el movimiento se detiene y luego recargan los datos espaciales. Algunas cámaras solo se actualizan después de un breve retraso. Algunas cámaras no se actualizan bien en absoluto a menos que el operador devuelva la cámara a un preset conocido. Es por eso que siempre pregunto al proveedor cómo maneja el dispositivo el control en vivo, las llamadas a presets y las rutas de patrulla. También pregunto si la recalibración ocurre en cada movimiento o solo al regresar al inicio. Para trabajos B2B, este detalle importa porque al cliente no le importa la teoría. Al cliente le importa si la regla permanece activa cuando el guardia presiona “inicio”, “preset 5” o un barrido manual.
Comportamiento típico después del movimiento
| Tipo de movimiento | Velocidad de actualización de la regla | Nivel de riesgo | Mi punto de vista práctico |
|---|---|---|---|
| Llamada preestablecida | Rápido | Bajo | Mejor para un cambio de regla estable |
| Recorrido de patrulla | Medio a rápido | Medio | Necesita una buena lógica de firmware |
| Movimiento manual con joystick | Varía | Más alto | A menudo necesita resincronización |
| Regresar a casa | Rápido y estable | Bajo | Mejor momento para recalibrar |
¿Cómo se evita la “Deriva de Reglas” después de miles de ciclos de paneo e inclinación?
Me preocupa la deriva en cualquier sistema en movimiento, porque pequeños errores pueden crecer con el tiempo. Una cámara puede verse bien el primer día y aun así convertirse en un problema después de muchas semanas de movimiento.
La deriva de la regla se previene mediante un diseño mecánico robusto, codificadores precisos, corrección regular de la posición de inicio y, a veces, calibración automática visual. El objetivo es mantener el mapa de software vinculado al ángulo real de la lente a largo plazo.
 Prevención de la deriva de reglas PTZ
Prevención de la deriva de reglas PTZ
Veo la deriva de la regla como una lenta pérdida de confianza entre la cámara y el mundo. La cámara aún puede moverse, pero su idea interna de hacia dónde apunta ya no coincide con la escena real. Esto puede suceder debido al desgaste del engranaje, vibraciones, cambios de temperatura, ciclos de patrulla repetidos o una calibración débil. Para combatir esto, quiero más de una capa de protección. Primero, quiero un buen motor y un sólido codificador3. Si la cámara no puede medir bien su propia posición, ningún software puede salvarla. Segundo, quiero un claro posición de inicio2 que el dispositivo pueda regresar a menudo. Esto le da al sistema un punto fijo con el que comparar. Tercero, quiero que el firmware admita autocomprobaciones periódicas. Algunos sistemas pueden comparar puntos de referencia visuales, como postes, paredes o esquinas de puertas, y luego corregir pequeños desplazamientos. Cuarto, quiero que el equipo de instalación pruebe el dispositivo bajo estrés de movimiento real, no solo en un laboratorio. Para un PTZ solar en un sitio remoto, esto importa aún más, porque la cámara puede funcionar todo el día, enfrentar el viento y seguir girando en modo de patrulla. También pregunto si el proveedor tiene un límite de deriva6, un método de reinicio a cero o un intervalo de mantenimiento. Estas son preguntas sencillas, pero me dicen si el producto está diseñado para un uso prolongado o solo para una demostración.
Mi lista de verificación de control de deriva
| Método de control | Lo que hace | Mi nota |
|---|---|---|
| Retroalimentación del codificador | Rastrea la posición de la lente | Debe ser preciso |
| Regreso a casa | Vuelve a fijar el punto base | Muy importante |
| Recalibración visual | Utiliza puntos de referencia de la escena | Útil para la estabilidad a largo plazo |
| Pruebas de límite de patrulla | Estresa el sistema de movimiento | Ayuda a exponer un diseño débil |
| Intervalo de mantenimiento | Mantiene el sistema honesto | Mejor para sitios remotos |
¿Es esta función compatible con plataformas VMS de terceros como Milestone o Blue Iris?
Siempre me preocupa la compatibilidad de la plataforma, porque incluso una cámara potente puede convertirse en un mal producto si no puede unirse al sistema que el cliente ya utiliza.
La compatibilidad depende de si el VMS puede leer los datos PTZ y metadatos de la cámara. Si la cámara admite ONVIF, RTSP y los mensajes de eventos o reglas correctos, las plataformas de terceros pueden funcionar bien, pero el mapeo dinámico avanzado no siempre está completamente expuesto.
 Compatibilidad de VMS de terceros para reglas PTZ
Compatibilidad de VMS de terceros para reglas PTZ
Trato el soporte de VMS como dos preguntas separadas. La primera pregunta es video y control básicos. ¿Puede la cámara transmitir video? ¿Puede el VMS mover la lente? ¿Puede llamar a preajustes? Si la respuesta es sí, el proyecto a menudo puede avanzar. La segunda pregunta es inteligencia de reglas. ¿Puede el VMS entender el perímetro virtual, el mapa en movimiento, el conjunto de reglas enlazadas a preajustes o los datos de coordenadas dinámicas? Esta parte es mucho más difícil. Algunas plataformas VMS solo ven la cámara como una fuente de video y un dispositivo PTZ. No entienden completamente las posiciones de las reglas que cambian con el paneo, la inclinación y el zoom. En ese caso, la cámara aún puede funcionar, pero la función de regla inteligente puede permanecer dentro de la cámara misma. Es por eso que siempre solicito una prueba con el VMS exacto que utiliza el cliente. Hito4 y Lirio azul5 ambos pueden ser útiles, pero la respuesta real depende del modelo, firmware, soporte de protocolo y cómo la cámara envía metadatos. Para los integradores de sistemas, esto es muy importante porque un proyecto puede fallar en el último paso si la cámara y el VMS no hablan el mismo idioma. Creo que el camino más seguro es verificar el soporte del perfil ONVIF, el mapeo de comandos PTZ, el manejo de eventos y la visualización de reglas antes de un pedido a granel.
Lo que verifico con una prueba de VMS
| Punto de prueba | Por qué lo pruebo | Buen resultado |
|---|---|---|
| Transmisión de video en vivo | Conexión básica | Video estable con baja latencia |
| control PTZ | Movimiento remoto | Control suave de preajustes y manual |
| Salida de eventos | Lógica de alarma | Los eventos aparecen a tiempo |
| Soporte de metadatos | Reglas inteligentes | Los datos son legibles por el VMS |
| Visualización de reglas | Confianza del operador | Las reglas permanecen visibles y utilizables |
Conclusión
Confío en las reglas vinculadas a preajustes para trabajos sencillos, pero confío en el mapeo y la calibración dinámicos solo cuando el hardware, el firmware y el VMS de la cámara lo admiten bien.
1. Referencia para los fundamentos de las coordenadas PTZ y cómo afectan el posicionamiento de las reglas. ︎↩︎ 2. Lea sobre el uso de una posición de inicio fija como referencia para la recalibración. ︎↩︎ 3. Información general sobre los codificadores rotativos utilizados para medir la posición de la lente PTZ. ︎↩︎ 4. Vea cómo Milestone XProtect integra cámaras PTZ de terceros con reglas virtuales. ︎↩︎ 5. Revise las capacidades de Blue Iris para el manejo de reglas PTZ y el análisis de metadatos. ︎↩︎ 6. Verifique los límites de deriva especificados por el fabricante para la precisión PTZ a largo plazo. ︎↩︎ 7. Comprenda cómo las posiciones preestablecidas activan automáticamente reglas virtuales específicas. ︎↩︎ 8. Aprenda cómo el mapeo dinámico de coordenadas mantiene alineadas las líneas virtuales durante el movimiento PTZ. ︎↩︎