
غالبًا ما أرى الفرق تفقد الثقة عندما تتحرك كاميرا PTZ وتبدو القواعد غير منطقية. أريد أن تظل خطوط السياج الخاصة بي في المكان الذي يوجد فيه العالم الحقيقي.
نعم،, القواعد المرتبطة بالإعدادات المسبقة7 يمكن التبديل تلقائيًا، ولكن التحول التلقائي الحقيقي يتطلب كاميرا تدعم رسم الخرائط الديناميكي للإحداثيات8. تحتفظ معظم أنظمة PTZ بالقواعد مرتبطة بالإعدادات المسبقة، بينما يمكن للأنظمة المتطورة تتبع تغييرات التحريك والإمالة والتقريب وإبقاء الخطوط الافتراضية محاذية.
 محيط PTZ الافتراضي ورسم الخرائط للقواعد
محيط PTZ الافتراضي ورسم الخرائط للقواعد
عندما أقارن المشاريع الحقيقية، أرى نتيجتين مختلفتين تمامًا. تعمل بعض الأنظمة بشكل جيد فقط في المواضع المحددة مسبقًا. تعمل أنظمة أخرى على إبقاء القواعد مرتبطة بالمشهد حتى أثناء تحرك العدسة، ولكن هذا يتطلب أجهزة أفضل وبرامج ثابتة أذكى ومعايرة جيدة.
جدول المحتويات
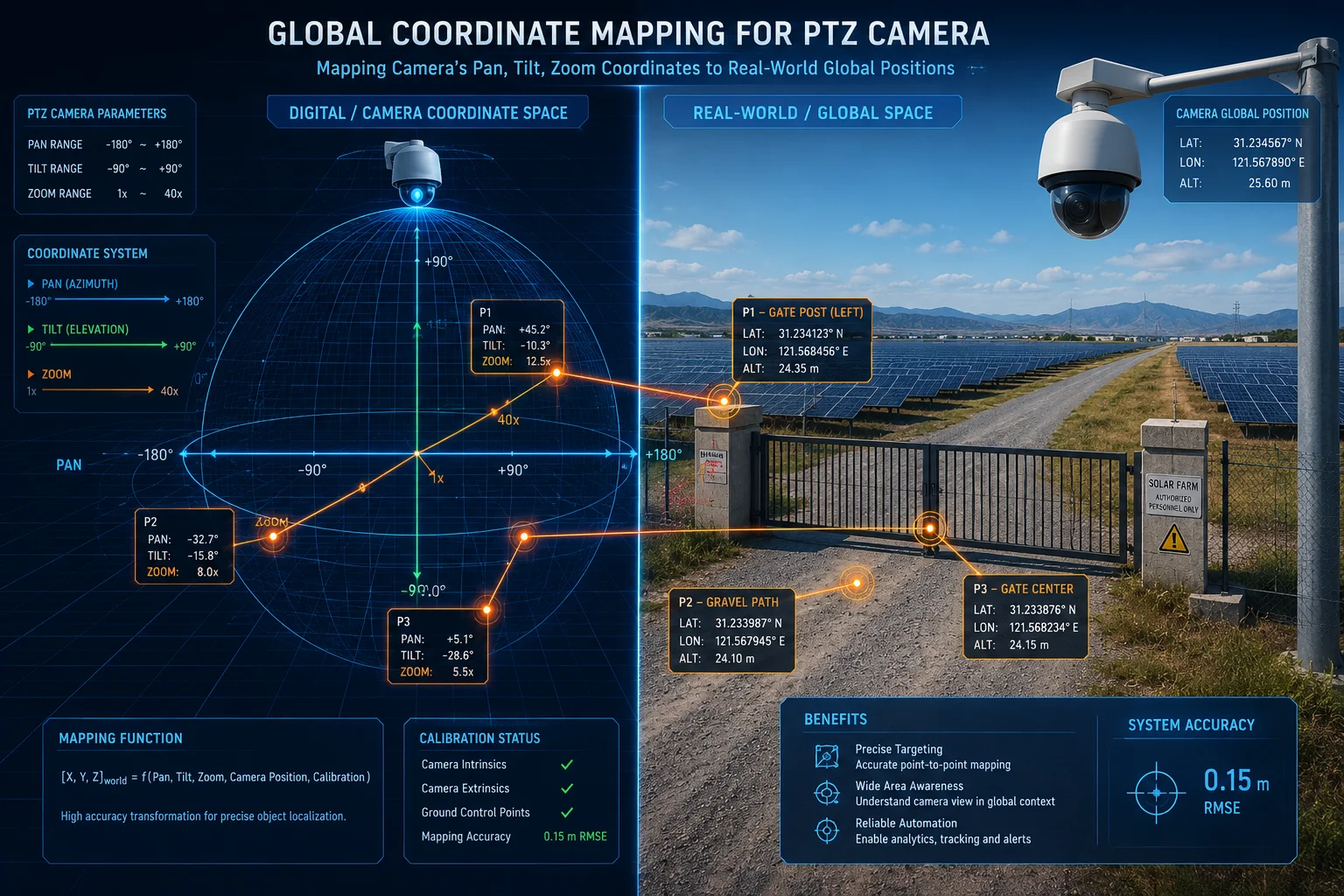
هل يضمن “رسم الخرائط العالمي للإحداثيات” بقاء خطوط السياج الخاصة بي محاذية للعالم المادي؟
لقد رأيت هذا السؤال يظهر كثيرًا، لأن لا أحد يريد سياجًا افتراضيًا يبتعد عن البوابة. أريد أن يظل الخط على الطريق أو السياج أو الفناء، وليس أن ينحرف عبر الشاشة.
يمكن لرسم الخرائط العالمي للإحداثيات إبقاء خطوط السياج محاذية للعالم المادي إذا كانت الكاميرا تتمتع بتغذية راجعة للموضع الحقيقي ومعايرة جيدة ومحرك رسم خرائط قوي. إنها ليست مجرد أداة رسم. إنها طريقة لربط كل قاعدة بموضع مكاني ثابت.
 رسم الخرائط العالمي للإحداثيات لقواعد PTZ
رسم الخرائط العالمي للإحداثيات لقواعد PTZ
أعتقد أن النقطة الرئيسية بسيطة: رسم الخرائط العالمي لا يكون جيدًا إلا بقدر البيانات التي تقف وراءه. إذا كانت الكاميرا تعرف زاوية التحريك، زاوية الإمالة، مستوى التقريب1 ونقطة البداية بدقة كافية، يمكنها إسقاط نفس القاعدة في كل عرض جديد. لهذا السبب قد يبدو الخط وكأنه “يتحرك” على الشاشة، ولكنه في الواقع يبقى في نفس المكان في العالم الحقيقي. من الناحية العملية، هذا يعني أنه يمكنني رسم سياج افتراضي مرة واحدة ثم السماح للكاميرا بتحديث جانب الصورة من هذا السياج أثناء دوران العدسة. ولكن يجب أن أكون حذرًا أيضًا. الأخطاء الميكانيكية الصغيرة، أو التروس المرتخية، أو المشفرات الضعيفة، أو المعايرة المصنعية السيئة يمكن أن تكسر التطابق بين الصورة والأرض. إذا فقد النظام مرجعه، يمكن أن ينحرف الخط قليلاً في البداية وكثيرًا لاحقًا. لهذا السبب أعامل هذه الميزة دائمًا كمزيج من البرامج والأجهزة. يمكن للبرنامج رسم خريطة للعالم. يجب أن تخبر الأجهزة بالحقيقة حول مكان توجيه العدسة. بالنسبة لمشروع مثل موقع طاقة شمسية 4G أو بوابة مزرعة واسعة، هذا مهم أكثر لأن الكاميرا قد تتحرك عدة مرات كل يوم.
ما أتحقق منه قبل أن أثق بنظام رسم الخرائط
| عنصر التحقق | لماذا هو مهم | ما أريد رؤيته |
|---|---|---|
| ردود فعل التحريك/الإمالة | يجب أن تعرف الكاميرا موقعها الدقيق | مشفر مستقر أو تحكم قوي في الموضع |
| ردود فعل التكبير | يتغير شكل القاعدة مع مجال الرؤية | تقرير تكبير دقيق |
| الموضع الرئيسي | يحتاج النظام إلى نقطة أساس ثابتة | سلوك موثوق للعودة إلى الموضع الرئيسي |
| عملية المعايرة | يجب أن تتطابق الخريطة مع المشهد الحقيقي | إعداد بسيط ولكنه قابل للتكرار |
| التحكم في الانجراف طويل الأمد | يجب أن تظل القواعد صحيحة بمرور الوقت | دعم الفحص التلقائي أو إعادة المعايرة |
هل سيتم إعادة معايرة القواعد الافتراضية فورًا بعد حركة PTZ يدوية أو استدعاء إعداد مسبق؟
أعلم أن هذا قد يبدو محفوفًا بالمخاطر عندما أحرك كاميرا PTZ يدويًا ثم أتوقع أن تتماشى القواعد معها. لا أريد تأخيرًا، لأن التأخير يمكن أن يعني أحداثًا فائتة أو إنذارات كاذبة.
في نظام مصمم جيدًا، يمكن تحديث القواعد فورًا بعد استدعاء إعداد مسبق، ولكن حركة PTZ اليدوية أقل موثوقية. يسهل تتبع حركات الإعداد المسبق لأن الكاميرا تعرف نقطة الهدف، بينما قد تحتاج الحركات اليدوية إلى نقطة قفل جديدة أو خطوة إعادة مزامنة قصيرة.
 إعادة معايرة قاعدة إعداد PTZ المسبق
إعادة معايرة قاعدة إعداد PTZ المسبق
عادةً ما أقسّم هذا إلى حالتين. الحالة الأولى هي الحركة من إعداد مسبق إلى إعداد مسبق. هذا هو المسار الأنظف. تعرف الكاميرا بالفعل أماكن الإعداد المسبق 1، والإعداد المسبق 2، والإعداد المسبق 3. لذلك عندما أستدعي إعدادًا مسبقًا، يمكن للبرنامج الثابت تبديل القواعد ذات الصلة أو إعادة إسقاط السياج المعين تقريبًا على الفور. الحالة الثانية هي الحركة اليدوية باستخدام عصا التحكم أو التطبيق أو التحكم في نظام إدارة الفيديو (VMS). هنا، قد لا يعرف النظام ما إذا كنت قد توقفت في مكان صالح، أو ما إذا كنت قد مررت بمنطقة عمياء، أو ما إذا كان التكبير قد تغير أثناء الحركة. لذلك تنتظر بعض الكاميرات حتى تتوقف الحركة ثم تعيد تحميل البيانات المكانية. تقوم بعض الكاميرات بالتحديث فقط بعد تأخير قصير. لا تقوم بعض الكاميرات بالتحديث بشكل جيد على الإطلاق ما لم يقم المشغل بإعادة الكاميرا إلى إعداد مسبق معروف. لهذا السبب أسأل دائمًا المورد عن كيفية تعامل الجهاز مع التحكم المباشر واستدعاءات الإعدادات المسبقة ومسارات الدوريات. أسأل أيضًا عما إذا كانت إعادة المعايرة تحدث مع كل حركة أو فقط عند العودة إلى الموضع الرئيسي. بالنسبة لوظائف B2B، هذه التفاصيل مهمة لأن العميل لا يهتم بالنظرية. يهتم العميل بما إذا كانت القاعدة تظل نشطة عندما يضغط الحارس على “الرئيسي” أو “الإعداد المسبق 5” أو مسح يدوي.
السلوك النموذجي بعد الحركة
| نوع الحركة | سرعة تحديث القاعدة | مستوى المخاطرة | وجهة نظري العملية |
|---|---|---|---|
| استدعاء مسبق | سريع | منخفضة | الأفضل للتبديل المستقر للقاعدة |
| جولة دورية | متوسط إلى سريع | متوسط | يحتاج إلى منطق برمجي ثابت جيد |
| حركة عصا التحكم اليدوية | يختلف | أعلى | غالبًا ما يحتاج إلى إعادة مزامنة |
| العودة إلى المنزل | سريع ومستقر | منخفضة | أفضل وقت لإعادة المعايرة |
كيف تمنع “انحراف القاعدة” بعد آلاف دورات التحريك والإمالة؟
أخشى الانجراف في أي نظام متحرك، لأن الأخطاء الصغيرة يمكن أن تنمو بمرور الوقت. قد تبدو الكاميرا جيدة في اليوم الأول ولا تزال تصبح مشكلة بعد أسابيع عديدة من الحركة.
يتم منع انجراف القاعدة عن طريق التصميم الميكانيكي القوي، والمشفرات الدقيقة، والتصحيح المنتظم للموضع الرئيسي، وأحيانًا المعايرة التلقائية المرئية. الهدف هو ربط خريطة البرنامج بزاوية العدسة الحقيقية على المدى الطويل.
 منع انجراف قاعدة PTZ
منع انجراف قاعدة PTZ
أرى انجراف القاعدة على أنه فقدان بطيء للثقة بين الكاميرا والعالم. قد تستمر الكاميرا في الحركة، لكن فكرتها الداخلية عن مكان توجيهها لم تعد تتطابق مع المشهد الحقيقي. يمكن أن يحدث هذا بسبب تآكل التروس، أو الاهتزاز، أو تغير درجة الحرارة، أو دورات الدوريات المتكررة، أو ضعف المعايرة. لمكافحة ذلك، أريد أكثر من طبقة واحدة من الحماية. أولاً، أريد محركًا جيدًا وصلبًا مشفر3. إذا لم تتمكن الكاميرا من قياس موضعها بشكل جيد، فلا يمكن لأي برنامج إنقاذها. ثانيًا، أريد واضحًا وضع المنزل2 أن الجهاز يمكنه العودة إليه غالبًا. هذا يعطي النظام نقطة ثابتة للمقارنة بها. ثالثًا، أريد أن يدعم البرنامج الثابت عمليات التحقق الذاتي الدورية. يمكن لبعض الأنظمة مقارنة المعالم المرئية، مثل الأعمدة أو الجدران أو زوايا البوابات، ثم تصحيح الانحرافات الصغيرة. رابعًا، أريد من فريق التركيب اختبار الجهاز تحت ضغط الحركة الحقيقي، وليس فقط في المختبر. بالنسبة لكاميرا PTZ تعمل بالطاقة الشمسية في موقع بعيد، يصبح هذا الأمر أكثر أهمية، لأن الكاميرا قد تعمل طوال اليوم، وتتعرض للرياح، وتستمر في الدوران في وضع الدوريات. أسأل أيضًا عما إذا كان المورد لديه حد الانحراف6, ، طريقة إعادة الضبط، أو فترة صيانة. هذه أسئلة بسيطة، لكنها تخبرني ما إذا كان المنتج مصممًا للاستخدام الطويل أم للعرض فقط.
قائمة التحقق الخاصة بي للتحكم في الانحراف
| طريقة التحكم | ما يفعله | ملاحظتي |
|---|---|---|
| تغذية المشفر | يتتبع موضع العدسة | يجب أن يكون دقيقًا |
| العودة إلى المنزل | يعيد قفل النقطة الأساسية | مهم جداً |
| إعادة المعايرة المرئية | يستخدم المعالم المرئية للمشهد | مفيد للاستقرار طويل الأمد |
| اختبار حد الدوريات | يضغط على نظام الحركة | يساعد في كشف التصميم الضعيف |
| فترة الصيانة | يحافظ على نزاهة النظام | أفضل للمواقع البعيدة |
هل هذه الميزة متوافقة مع منصات VMS التابعة لجهات خارجية مثل Milestone أو Blue Iris؟
أنا دائمًا أهتم بتوافق المنصة، لأن حتى الكاميرا القوية يمكن أن تصبح منتجًا سيئًا إذا لم تتمكن من الانضمام إلى النظام الذي يستخدمه العميل بالفعل.
يعتمد التوافق على ما إذا كان نظام إدارة الفيديو (VMS) يمكنه قراءة بيانات PTZ والبيانات الوصفية للكاميرا. إذا كانت الكاميرا تدعم ONVIF و RTSP والرسائل المناسبة للأحداث أو القواعد، فقد تعمل المنصات الخارجية بشكل جيد، ولكن تعيين الخرائط الديناميكية المتقدمة لا يتم الكشف عنه دائمًا بالكامل.
 توافق نظام إدارة الفيديو (VMS) الخارجي لقواعد PTZ
توافق نظام إدارة الفيديو (VMS) الخارجي لقواعد PTZ
أتعامل مع دعم نظام إدارة الفيديو (VMS) كسؤالين منفصلين. السؤال الأول هو الفيديو والتحكم الأساسي. هل يمكن للكاميرا بث الفيديو؟ هل يمكن لنظام إدارة الفيديو (VMS) تحريك العدسة؟ هل يمكنه استدعاء الإعدادات المسبقة؟ إذا كانت الإجابة نعم، فيمكن للمشروع غالبًا المضي قدمًا. السؤال الثاني هو ذكاء القواعد. هل يمكن لنظام إدارة الفيديو (VMS) فهم المحيط الافتراضي، والخريطة المتحركة، ومجموعة القواعد المرتبطة بالإعدادات المسبقة، أو بيانات الإحداثيات الديناميكية؟ هذا الجزء أصعب بكثير. ترى بعض منصات نظام إدارة الفيديو (VMS) الكاميرا كمصدر فيديو وجهاز PTZ فقط. إنهم لا يفهمون تمامًا مواضع القواعد التي تتغير مع التحريك والإمالة والتقريب. في هذه الحالة، قد تظل الكاميرا تعمل، ولكن قد تظل ميزة القاعدة الذكية داخل الكاميرا نفسها. لهذا السبب أطلب دائمًا اختبارًا مع نظام إدارة الفيديو (VMS) الدقيق الذي يستخدمه العميل. علامة فارقة4 و السوسن الأزرق5 يمكن أن يكون كلاهما مفيدًا، ولكن الإجابة الحقيقية تعتمد على الطراز والبرنامج الثابت ودعم البروتوكول وكيف ترسل الكاميرا البيانات الوصفية. بالنسبة لمدمجي الأنظمة، هذا أمر مهم جدًا لأن المشروع يمكن أن يفشل في الخطوة الأخيرة إذا لم تتحدث الكاميرا ونظام إدارة الفيديو (VMS) نفس اللغة. أعتقد أن المسار الأكثر أمانًا هو التحقق من دعم ملف ONVIF الشخصي، وتعيين أوامر PTZ، ومعالجة الأحداث، وعرض القواعد قبل طلب كمية كبيرة.
ما أتحقق منه من خلال اختبار نظام إدارة الفيديو (VMS)
| نقطة الاختبار | لماذا أقوم باختبارها | نتيجة جيدة |
|---|---|---|
| بث فيديو مباشر | اتصال أساسي | فيديو مستقر مع تأخير منخفض |
| التحكم PTZ | حركة عن بعد | تحكم سلس بالإعدادات المسبقة واليدوي |
| إخراج الأحداث | منطق الإنذار | تظهر الأحداث في الوقت المحدد |
| دعم البيانات الوصفية | قواعد ذكية | البيانات قابلة للقراءة بواسطة نظام إدارة الفيديو (VMS) |
| عرض القاعدة | ثقة المشغل | تظل القواعد مرئية وقابلة للاستخدام |
الخاتمة
أثق في القواعد المرتبطة بالإعدادات المسبقة للمهام البسيطة، ولكني أعتمد على التعيين والمعايرة الديناميكية فقط عندما تدعم أجهزة الكاميرا والبرامج الثابتة ونظام إدارة الفيديو (VMS) ذلك بشكل جيد.
1. مرجع لأساسيات إحداثيات PTZ وكيف تؤثر على تحديد موضع القواعد. ︎↩︎ 2. اقرأ عن استخدام موضع المنزل الثابت كمرجع لإعادة المعايرة. ︎↩︎ 3. خلفية عن المشفرات الدوارة المستخدمة لقياس موضع عدسة PTZ. ︎↩︎ 4. شاهد كيف تدمج Milestone XProtect كاميرات PTZ التابعة لجهات خارجية مع القواعد الافتراضية. ︎↩︎ 5. راجع إمكانيات Blue Iris لمعالجة قواعد PTZ وتحليل البيانات الوصفية. ︎↩︎ 6. تحقق من حدود الانحراف المحددة من قبل الشركة المصنعة لدقة PTZ طويلة الأجل. ︎↩︎ 7. افهم كيف تقوم المواضع المحددة مسبقًا بتنشيط قواعد افتراضية محددة تلقائيًا. ︎↩︎ 8. تعلم كيف يحافظ تعيين الإحداثيات الديناميكي على محاذاة الخطوط الافتراضية أثناء حركة PTZ. ︎↩︎