
Ouço frequentemente essa pergunta de integradores e sei o motivo. Em campo, um alvo raramente permanece totalmente visível. Cercas, arbustos, sombras e postes atrapalham rapidamente.
IA1 ainda consegue identificar muitos alvos quando mais de 50% está oculto, mas o resultado depende do modelo, da cena e de quanta informação corporal chave ainda está visível.
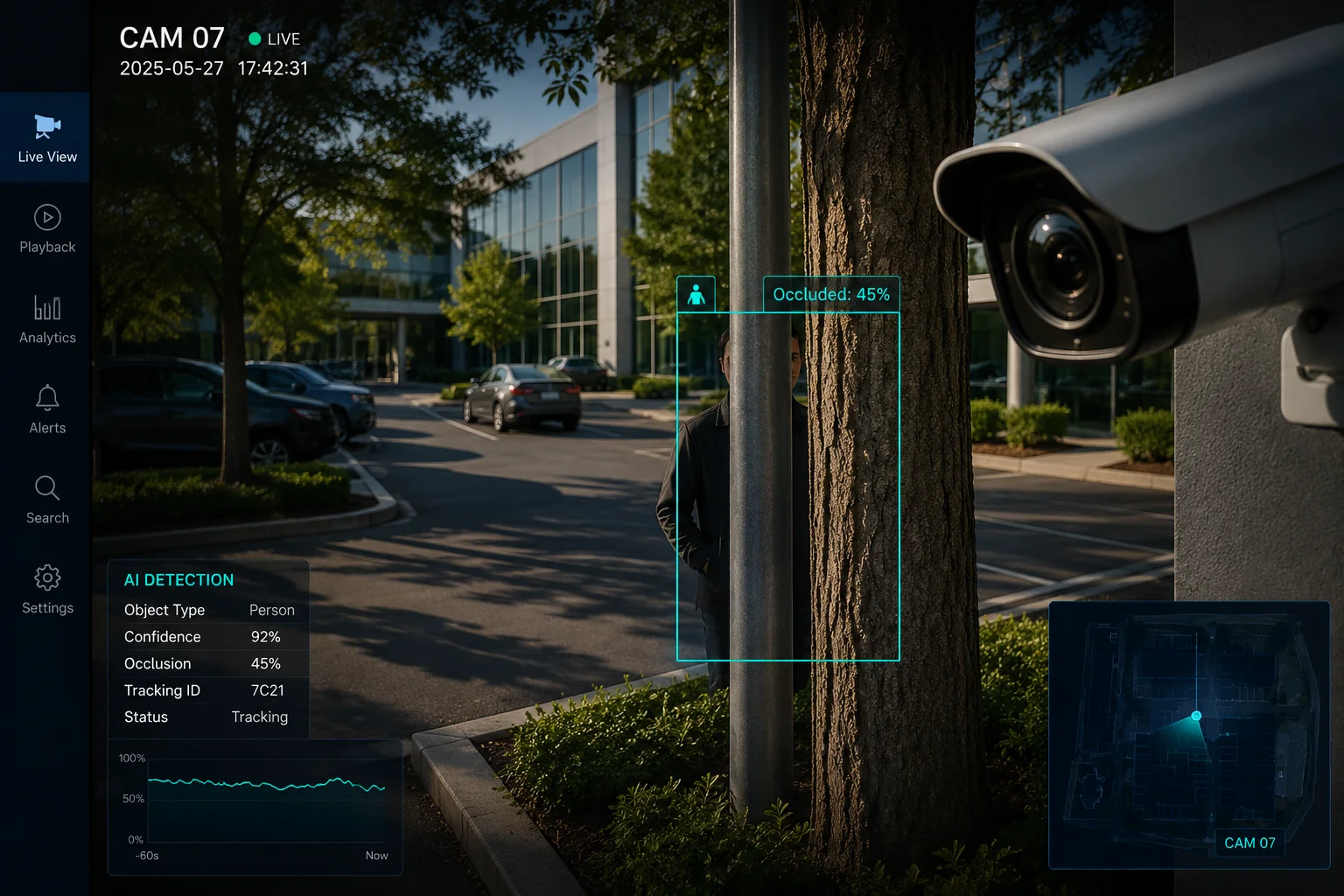 Detecção de oclusão de alvos por IA em câmeras de segurança
Detecção de oclusão de alvos por IA em câmeras de segurança
Quando trabalho com compradores B2B, nunca trato a oclusão como um problema simples de sim ou não. Eu a vejo como uma mistura de detecção, rastreamento e previsão. É aí que o valor real começa.
Índice
O rastreamento permanecerá travado se uma pessoa passar por trás de uma cerca ou uma fileira fina de arbustos?
Já vi esse problema muitas vezes em locais externos e sei o quão irritante pode ser. Uma pessoa aparece claramente em um momento, e uma cerca interrompe o rastreamento no próximo.
Sim, o rastreamento pode permanecer travado por um curto período se o sistema tiver uma lógica de rastreamento forte lógica de rastreamento2, mas o resultado depende da continuidade do movimento, da desordem da cena e de quanto tempo o alvo permanece oculto.
 Rastreamento de IA atrás de cercas e arbustos
Rastreamento de IA atrás de cercas e arbustos
Por que uma cerca nem sempre interrompe o rastreamento
Eu uso este caso para explicar a lacuna entre detecção e rastreamento. A detecção encontra a pessoa. O rastreamento segue a pessoa ao longo do tempo. Quando uma cerca fina ou arbustos cobrem parte do corpo, o sistema ainda pode manter o mesmo ID se pistas visuais suficientes permanecerem. Uma forma humana, velocidade de caminhada e direção do caminho ajudam. Se o alvo for apenas parcialmente oculto por um ou dois quadros, um rastreador forte geralmente pode manter o bloqueio. Se a pessoa se mover atrás de plantas densas ou uma cerca larga por muito tempo, a confiança diminui. Então o sistema pode perder o alvo ou criar um novo ID quando a pessoa retornar. Descobri que os melhores resultados vêm de câmeras com bom controle de ângulo e visualizações de fundo limpas. Se eu instalar a câmera muito baixa, a linha da cerca cobre muito do corpo. Se eu a colocar muito alta, posso perder detalhes do rosto e dos ombros. Por isso, sempre equilibro o ângulo de visão, a distância e o layout da cena antes de prometer um rastreamento estável. Para compradores como David, isso é importante porque um rastreamento perdido pode significar um evento perdido, e isso pode custar dinheiro real em um trabalho de campo ou em um local remoto.
Resultados comuns em oclusão parcial
| Condição da cena | Resultado do rastreamento | O que eu espero |
|---|---|---|
| Cercas finas por 1-2 segundos | Geralmente permanece travado | Boa continuidade |
| Arbustos cobrem apenas as pernas | Frequentemente permanece travado | ID estável se o tronco for visível |
| Arbustos densos cobrem o tronco | Pode cair em breve | Maior chance de perda de ID |
| Oclusão longa atrás de um muro — Frequentemente readquire depois — Necessita Re-ID6 suporte |
O que eu verifico no mundo real
Eu não confio apenas em uma folha de especificações. Eu testo o caminho real da pessoa. Eu observo quanto tempo a pessoa fica escondida. Eu também verifico se a câmera mantém o corpo centralizado no quadro. Um bom sistema PTZ5 pode ajudar porque ele pode seguir o movimento e dar zoom novamente depois que o alvo retorna. Em muitos casos, a câmera em si não é o ponto fraco. O ponto fraco é a regra de software que decide quando manter o rastreamento e quando descartá-lo. Se essa regra for muito rigorosa, o sistema perde a pessoa muito cedo. Se for muito frouxa, pode confundir uma pessoa com outra. Eu geralmente digo aos clientes que rastrear atrás de uma cerca é possível, mas nunca é mágica. Funciona melhor quando a câmera vê histórico de movimento suficiente e forma corporal suficiente antes que a obstrução comece.
Como o algoritmo de reconhecimento “Baseado em Partes” lida com alvos parcialmente ocultos?
Eu gosto desta pergunta porque ela vai ao cerne da visão de IA moderna. Um bom modelo não precisa ver tudo. Ele precisa ver as partes certas.
A algoritmo baseado em partes3 divide o alvo em partes visíveis do corpo, e ele ainda pode fazer uma correspondência a partir dessas partes quando o corpo inteiro não está visível.
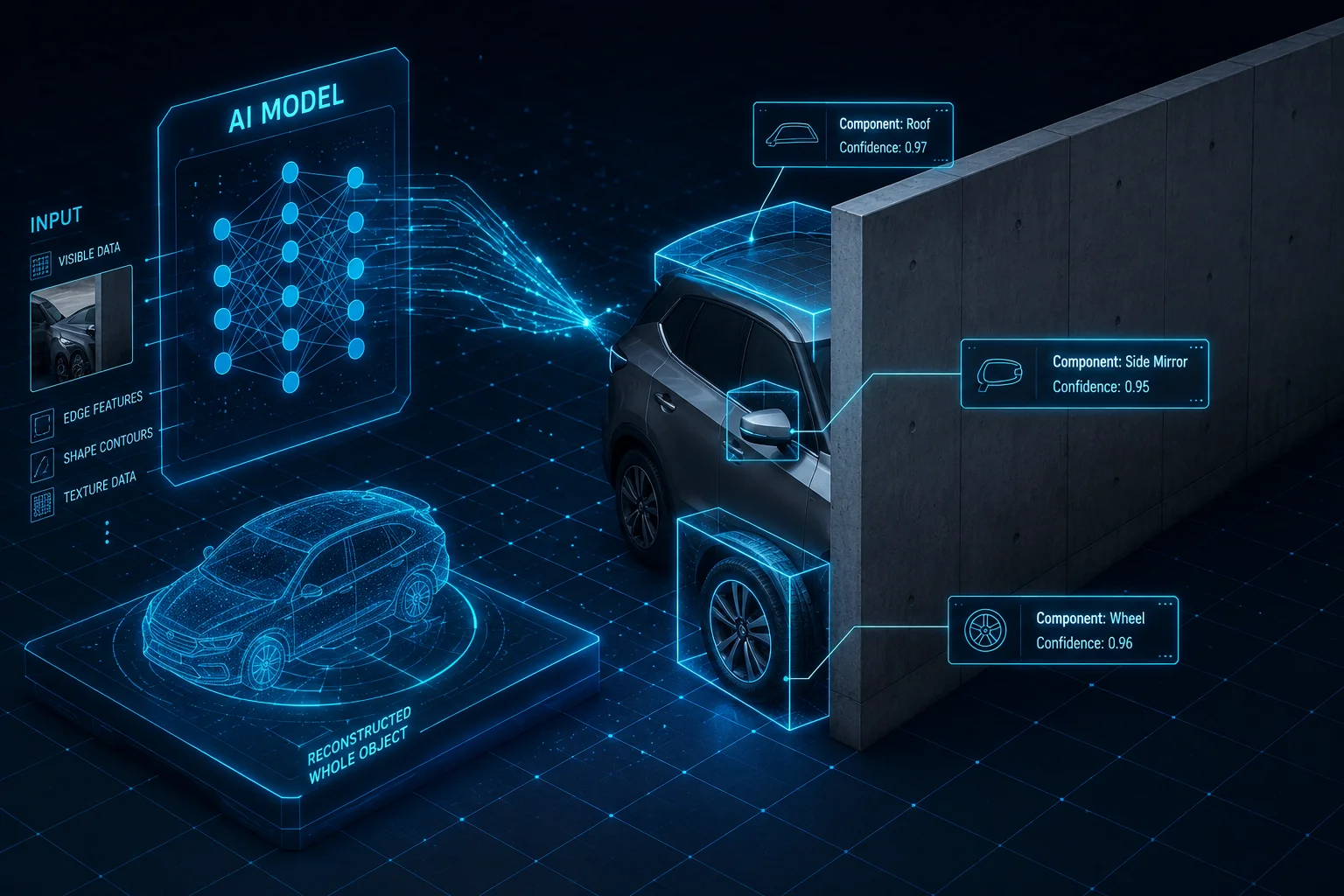 Reconhecimento baseado em partes para alvos parcialmente ocultos
Reconhecimento baseado em partes para alvos parcialmente ocultos
Por que as partes importam mais do que a forma completa
Eu penso em sistemas antigos como correspondentes de formas. Eles queriam a pessoa inteira ou o veículo inteiro em vista. Isso é frágil. Um modelo baseado em partes funciona de maneira mais inteligente. Ele olha para a cabeça, ombros, tronco, pernas, janelas, linhas do teto ou área da roda. Se algumas partes estiverem bloqueadas, o modelo ainda pode usar as partes que consegue ver. Isso é muito útil em locais externos com árvores, postes e sombras em movimento. Por exemplo, se eu puder ver a parte superior do corpo, o modelo ainda poderá dizer: “esta é uma pessoa”, porque as proporções do corpo humano ainda estão claras. Se eu puder ver a frente de um carro e parte do teto, o modelo ainda poderá saber que é um veículo. Este método é muito melhor do que uma simples correspondência de pixels. Também ajuda em cenas lotadas, onde um alvo se sobrepõe a outro. Mas eu sempre lembro aos clientes que o reconhecimento baseado em partes não é perfeito. Se as partes visíveis forem muito pequenas, muito borradas ou muito semelhantes ao fundo, o modelo ainda terá dificuldades. No meu trabalho, os melhores sistemas usam lógica baseada em partes em conjunto com pistas de movimento e histórico de quadros. Essa combinação dá ao modelo mais contexto. Ele não vê apenas um quadro congelado. Ele vê uma história em movimento.
O que o modelo geralmente olha
| Parte visível | Útil para identificação de pessoas | Útil para identificação de veículos |
|---|---|---|
| Cabeça e ombros | Alta | Baixa |
| Forma do tronco | Alta | Baixa |
| Pernas e movimento de caminhada | Médio | Baixa |
| Grelha frontal ou para-brisa | Baixa | Alta |
| Linha do teto ou painel lateral | Baixa | Alta |
Onde a lógica baseada em partes ajuda mais
Eu vejo o maior ganho em cenas com cobertura parcial repetida. Um portão de fazenda, um arbusto na beira da estrada ou uma cerca do local podem bloquear o mesmo alvo repetidamente. Um modelo baseado em partes aprende que as peças visíveis ainda pertencem juntas. Também ajuda quando o ângulo da câmera não é ideal. Muitas implantações reais não têm vistas perfeitas. A câmera pode estar voltada para uma estrada, um portão ou uma doca de carga de lado. Nesses casos, a forma completa do objeto geralmente está faltando. Um modelo baseado em partes me dá uma chance melhor de manter uma detecção útil. Para compradores que precisam de saída estável em VMS7 como Marco8 ou Íris Azul9, isso importa porque uma melhor correspondência de identidade significa menos alertas falsos e menos verificações manuais.
Onde ainda falha
Eu não quero exagerar. Se um alvo estiver quase totalmente oculto, o modelo pode adivinhar errado. Uma jaqueta ao vento pode parecer um corpo. Um galho pode parecer um braço. Um veículo parcial pode parecer um trailer ou um caminhão baú quando não é. É por isso que eu testo no local real, não apenas em um laboratório. O algoritmo melhora quando os dados de treinamento incluem o mesmo tipo de cercas, plantas e iluminação que o cliente tem no local. Essa é uma razão pela qual o ajuste OEM e ODM é importante. O modelo não deve ser apenas inteligente. Ele deve ser ajustado para a cena exata.
A IA usa previsão temporal para adivinhar o caminho do alvo enquanto ele está totalmente ocluído?
Eu confio nessa ideia o tempo todo no rastreamento externo. Se o alvo desaparecer por um momento, o sistema não deve agir às cegas.
Sim, muitos sistemas de rastreamento de IA usam previsão temporal4, então eles estimam onde o alvo deve reaparecer com base na velocidade, direção e histórico de movimento recente.
![]() Previsão temporal durante oclusão total
Previsão temporal durante oclusão total
Como a previsão funciona na prática
Eu penso na previsão temporal como um motor de adivinhação de curto prazo. O sistema observa onde o alvo estava nos últimos quadros. Ele aprende a direção do movimento e a velocidade. Então, quando o alvo passa por trás de um poste, uma parede ou uma árvore grossa, o sistema continua desenhando um caminho esperado. Isso não significa que a IA vê através do objeto. Significa que a IA faz uma melhor suposição por um curto período. Se a pessoa geralmente anda em velocidade constante, a previsão funciona bem. Se o alvo vira repentinamente, para ou muda de direção, a suposição se torna mais fraca. Acho isso especialmente útil no rastreamento PTZ, porque a câmera pode continuar se movendo enquanto o alvo está escondido. Isso ajuda o sistema a se recuperar mais rapidamente quando o alvo aparece novamente. Eu também uso essa lógica para explicar por que uma câmera ainda pode seguir uma pessoa por um ou dois segundos depois que a pessoa sai do campo de visão. Não é um erro. É um comportamento planejado. Mas a janela de previsão não deve ser muito longa. Se for muito longa, a câmera pode continuar seguindo um espaço vazio e perder um novo alvo. Os melhores sistemas mantêm a janela curta e usam a redeteção após o reaparecimento.
Previsão de curto prazo versus recuperação total
| Situação | Valor da previsão | Risco |
|---|---|---|
| Escondido por menos de 1 segundo | Muito útil | Baixa |
| Escondido por 1-3 segundos | Útil | Médio |
| Escondido por mais de 3 segundos | Fraco | Mais alto |
| Alvo muda de direção atrás da cobertura | Menos útil | Mais alto |
| Alvo retorna perto do caminho esperado | Forte novamente | Baixa |
Por que isso importa para trabalhos ao ar livre
Trabalho com clientes que usam câmeras em fazendas, portões, beiras de estradas e locais remotos. Esses lugares têm muitas oclusões curtas. Um trabalhador pode passar por trás de um poste de cerca de. Um caminhão pode desaparecer atrás de uma árvore. Um visitante pode cruzar uma linha de sebe. A previsão temporal ajuda a manter o evento suave. Reduz a perda de rastreamento e reduz o spam de alertas. Também ajuda a câmera PTZ a permanecer no assunto certo em vez de pular para o fundo. Para David e outros compradores técnicos, isso é um grande negócio porque o tempo perdido com a queda falsa de rastreamento significa mais chamadas de suporte e mais visitas ao local. Em locais remotos, esse custo é muitas vezes maior do que o próprio hardware.
O que torna a previsão mais forte
Descobri três coisas que mais ajudam. Primeiro, o alvo precisa de movimento claro antes da oclusão. Segundo, o fundo não deve ser muito barulhento. Terceiro, o rastreador precisa de um bom recurso de re-ID quando o alvo retorna. Quando essas três coisas funcionam juntas, o sistema pode lidar muito bem com muitos casos do mundo real. Quando um deles falha, o sistema se torna muito menos estável. É por isso que sempre testo o fluxo completo, não apenas a pontuação de detecção.
Posso ajustar o limite de “Tolerância à Oclusão” para evitar perder o rastreamento muito cedo?
Recebo muitas solicitações como essa de integradores que desejam mais controle. Eles querem que a câmera mantenha o alvo por mais tempo, mas também não querem falsos bloqueios aleatórios.
Sim, se o software oferecer uma configuração de tolerância a oclusão, você pode aumentá-la para manter o rastreamento por mais tempo, mas sempre a ajusto cuidadosamente porque um valor mais alto também pode aumentar os falsos positivos.
 Ajuste do limiar de tolerância a oclusão
Ajuste do limiar de tolerância a oclusão
Por que o ajuste do limiar não é igual para todos
Eu trato o ajuste do limiar como um equilíbrio em uma linha tênue. Se eu definir a tolerância muito baixa, o sistema perde o alvo assim que parte do corpo é bloqueada. Isso cria rastreamentos quebrados e alarmes perdidos. Se eu definir muito alta, o sistema pode manter um rastreamento ruim ativo por muito tempo. Então, ele pode seguir um objeto errado, e isso cria confusão no VMS. O valor certo depende do local. Uma fazenda com espaço aberto pode precisar de uma configuração diferente de um portão movimentado com muitas pessoas e veículos. Um local com arbustos finos pode precisar de uma configuração diferente de um pátio de armazém com muitos postes. Eu geralmente começo com clipes de teste do ambiente real. Em seguida, ajusto a tolerância passo a passo. Eu observo duas coisas ao mesmo tempo: com que frequência o sistema perde o alvo real e com que frequência ele mantém um falso. Isso me dá uma visão clara do compromisso. Um bom ajuste deve reduzir a perda precoce sem deixar o sistema preguiçoso. Deve ajudar a IA a permanecer honesta, não apenas grudenta.
Um guia simples de ajuste
| Escolha de ajuste | Efeito no rastreamento | Nível de risco |
|---|---|---|
| Tolerância menor | Perde o alvo mais rápido | Rastreamentos perdidos |
| Tolerância média | Comportamento equilibrado | Melhor para muitos locais |
| Tolerância maior | Mantém o alvo por mais tempo | Mais falsos bloqueios |
| Tolerância muito alta | Rastreamento muito grudento | Risco de alvo errado |
O que recomendo antes de alterar o limite
Eu geralmente digo aos clientes para verificarem primeiro a configuração da câmera. Se o ângulo for ruim, nenhum limite pode consertar isso. Se o alvo for muito pequeno no quadro, o modelo tem muito pouco detalhe. Se a iluminação for fraca, a IA pode perder o contorno do corpo muito cedo. Então eu arrumo a cena antes de mudar o software. Em seguida, reviso a configuração de oclusão. Também verifico se o sistema suporta verificação de múltiplos quadros10, porque isso pode ajudar muito. Se a IA puder confirmar um alvo em vários quadros, ela poderá sobreviver a coberturas curtas sem cair muito rápido. Para compradores que se preocupam com estabilidade e baixo custo de serviço, esse tipo de ajuste é frequentemente a diferença entre uma boa implantação e uma dor de cabeça de suporte.
Conclusão
Posso identificar e rastrear muitos alvos através de oclusão pesada, mas o melhor resultado depende da visão baseada em partes, previsão de movimento e ajuste cuidadoso do limite.
1. Aprenda os fundamentos da inteligência artificial e seu papel na visão computacional. ︎↩︎ 2. Explore diferentes abordagens para rastreamento de vídeo e como a lógica mantém a identidade do alvo ao longo do tempo. ︎↩︎ 3. Aprenda como os modelos baseados em partes detectam objetos identificando e combinando componentes visíveis. ︎↩︎ 4. Entenda como a previsão temporal (geralmente via filtros de Kalman) estima posições futuras do alvo com base no histórico de movimento. ︎↩︎ 5. Saiba mais sobre câmeras pan-tilt-zoom e como elas podem ser usadas para rastreamento ativo. ︎↩︎ 6. Descubra como os algoritmos de reidentificação reatribuem a identidade a um alvo após o reaparecimento. ︎↩︎ 7. Entenda os sistemas de gerenciamento de vídeo e seu papel na integração de feeds de câmeras de segurança. ︎↩︎ 8. Visite a Milestone Systems, um fornecedor líder de soluções VMS de plataforma aberta. ︎↩︎ 9. Saiba mais sobre o Blue Iris, um popular software de vigilância por vídeo para câmeras IP. ︎↩︎ 10. Aprenda como a verificação de múltiplos quadros melhora a precisão confirmando detecções em quadros consecutivos. ︎↩︎