
غالبًا ما أسمع هذا السؤال من المدمجين، وأنا أعرف السبب. في الميدان، نادرًا ما يظل الهدف مرئيًا بالكامل. الأسوار والشجيرات والظلال والأعمدة تعترض الطريق بسرعة.
الذكاء الاصطناعي1 لا يزال بإمكانه تحديد العديد من الأهداف عندما يكون أكثر من 50٪ مخفيًا، ولكن النتيجة تعتمد على النموذج والمشهد ومقدار تفاصيل الجسم الرئيسية التي لا تزال مرئية.
 اكتشاف حجب الأهداف بالذكاء الاصطناعي في كاميرات المراقبة
اكتشاف حجب الأهداف بالذكاء الاصطناعي في كاميرات المراقبة
عندما أتعامل مع مشترين من الشركات، لا أتعامل أبدًا مع الحجب كمشكلة بسيطة بنعم أو لا. أنظر إليها كمزيج من الاكتشاف والتتبع والتنبؤ. هذا هو المكان الذي تبدأ فيه القيمة الحقيقية.
جدول المحتويات
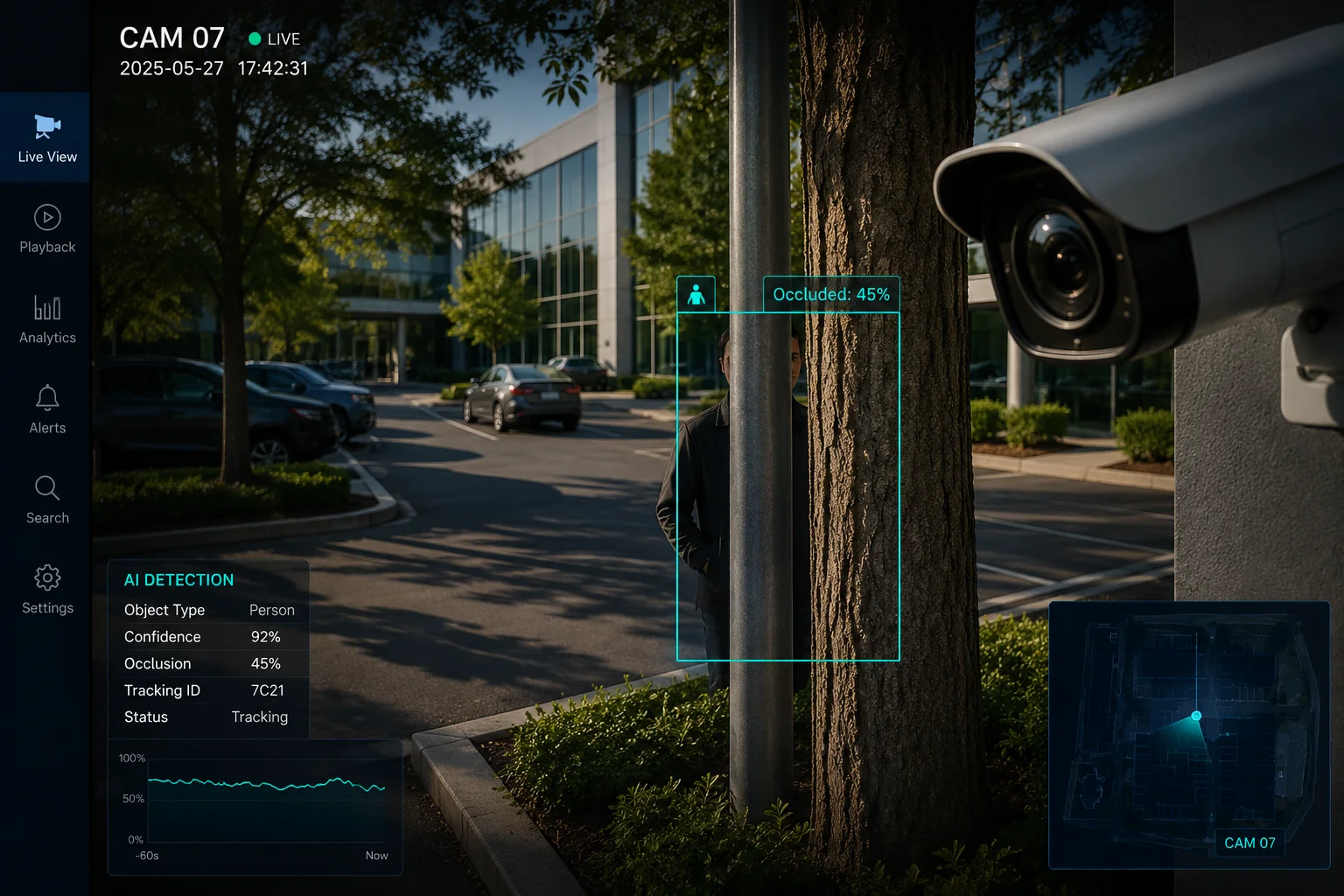
هل سيظل التتبع ثابتًا إذا سار شخص خلف سياج أو صف رفيع من الشجيرات؟
لقد رأيت هذه المشكلة مرات عديدة في المواقع الخارجية، وأنا أعرف مدى إزعاجها. يبدو الشخص واضحًا في لحظة، ثم يقطع السياج المسار في اللحظة التالية.
نعم، يمكن أن يظل المسار ثابتًا لفترة قصيرة إذا كان لدى النظام منطق تتبع قوي2, ، ولكن النتيجة تعتمد على استمرارية الحركة، وازدحام المشهد، ومدة بقاء الهدف مخفيًا.
 تتبع الذكاء الاصطناعي خلف السياج والشجيرات
تتبع الذكاء الاصطناعي خلف السياج والشجيرات
لماذا لا يقطع السياج التتبع دائمًا
أستخدم هذه الحالة لشرح الفجوة بين الاكتشاف والتتبع. الاكتشاف يجد الشخص. التتبع يتبع الشخص بمرور الوقت. عندما يغطي سياج رفيع أو شجيرات جزءًا من الجسم، قد يحتفظ النظام بنفس المعرف إذا بقيت أدلة بصرية كافية. شكل الإنسان وسرعة المشي واتجاه المسار كلها تساعد. إذا كان الهدف مخفيًا جزئيًا فقط لإطار أو إطارين، يمكن للمتتبع القوي عادةً الاحتفاظ بالقفل. إذا تحرك الشخص خلف نباتات كثيفة أو سياج واسع لفترة طويلة جدًا، تنخفض الثقة. ثم قد يفقد النظام الهدف أو ينشئ معرفًا جديدًا عندما يعود الشخص. لقد وجدت أن أفضل النتائج تأتي من الكاميرات ذات التحكم الجيد في الزاوية وعرض الخلفية النظيف. إذا قمت بتركيب الكاميرا منخفضة جدًا، فإن خط السياج يغطي الكثير من الجسم. إذا وضعتها مرتفعة جدًا، قد أفقد تفاصيل الوجه والكتف. لذلك، أوازن دائمًا بين زاوية الرؤية والمسافة وتخطيط المشهد قبل أن أعد بتتبع مستقر. بالنسبة للمشترين مثل ديفيد، هذا مهم لأن المسار المفقود يمكن أن يعني حدثًا فاشلاً، وهذا يمكن أن يكلف أموالًا حقيقية في وظيفة ميدانية أو موقع بعيد.
النتائج الشائعة في الحجب الجزئي
| حالة المشهد | نتيجة التتبع | ما أتوقعه |
|---|---|---|
| سياج رفيع لمدة 1-2 ثانية | يبقى مقفلاً عادةً | استمرارية جيدة |
| الشجيرات تغطي الساقين فقط | يبقى مقفلاً في كثير من الأحيان | هوية مستقرة إذا كان الجزء العلوي من الجسم مرئياً |
| الشجيرات الكثيفة تغطي الجذع | قد يسقط قريباً | فرصة أكبر لفقدان الهوية |
| انسداد طويل خلف جدار — غالباً ما يعاد اكتسابه لاحقاً — يحتاج إعادة تحديد الهوية6 دعم |
ما أتحقق منه في العالم الحقيقي
لا أثق في ورقة مواصفات وحدها. أختبر المسار الفعلي للشخص. أراقب المدة التي يبقى فيها الشخص مخفياً. أتحقق أيضاً مما إذا كانت الكاميرا تبقي الجسم في وسط الإطار. نظام PTZ جيد5 يمكن أن يساعد لأنه يمكنه تتبع الحركة والتكبير مرة أخرى بعد عودة الهدف. في كثير من الحالات، الكاميرا نفسها ليست نقطة الضعف. نقطة الضعف هي قاعدة البرنامج التي تقرر متى تحتفظ بالمسار ومتى تتخلى عنه. إذا كانت هذه القاعدة صارمة للغاية، يفقد النظام الشخص مبكراً جداً. إذا كانت فضفاضة جداً، فقد تخلط بين شخص وآخر. عادةً ما أخبر العملاء أن التتبع خلف سياج ممكن، ولكنه ليس سحراً أبداً. إنه يعمل بشكل أفضل عندما ترى الكاميرا تاريخ حركة كافٍ وشكل جسم كافٍ قبل بدء الانسداد.
كيف يتعامل خوارزمية التعرف “القائمة على الأجزاء” مع الأهداف المخفية جزئيًا؟
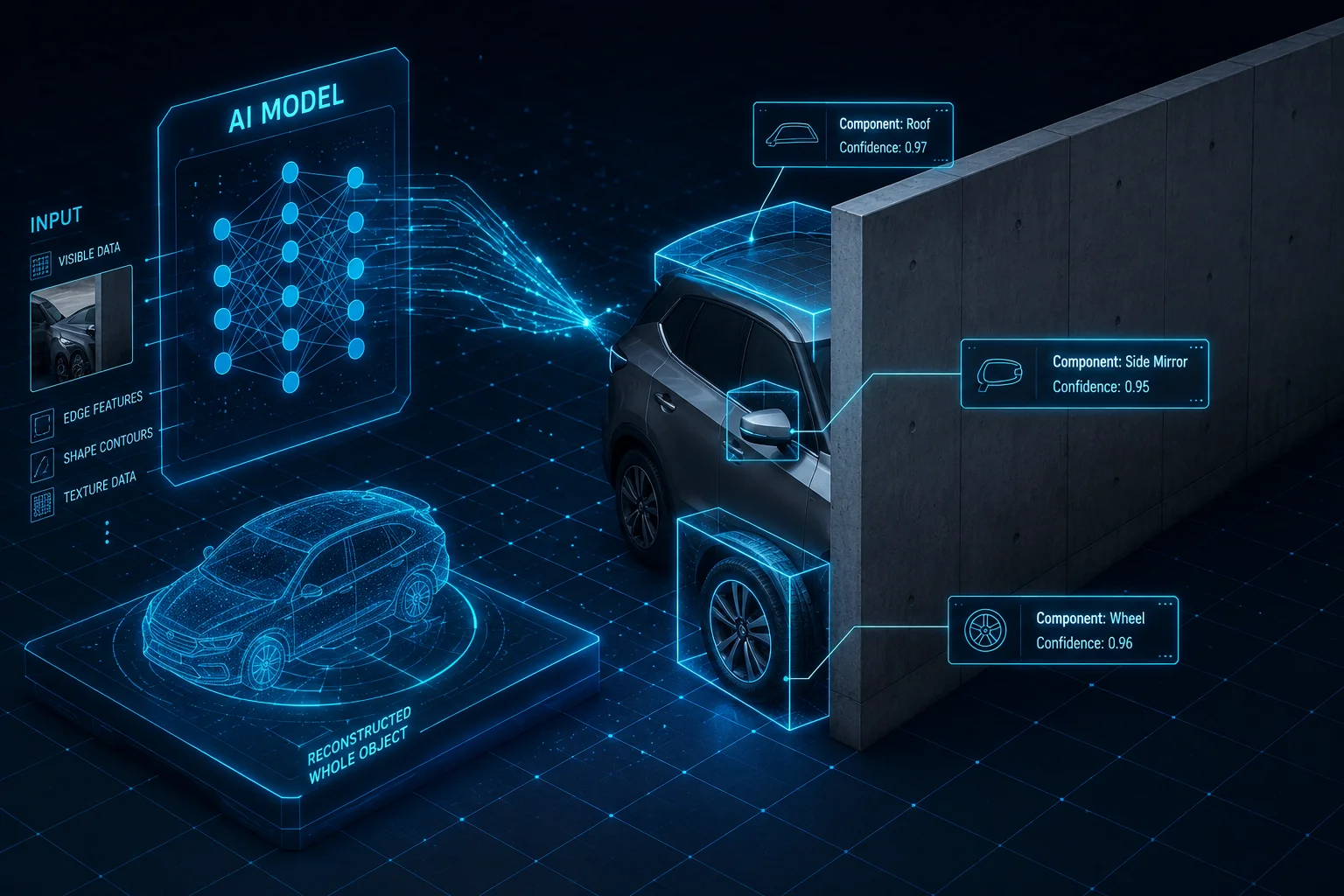
أحب هذا السؤال لأنه يصل إلى جوهر رؤية الذكاء الاصطناعي الحديث. النموذج الجيد لا يحتاج إلى رؤية كل شيء. يحتاج إلى رؤية الأجزاء الصحيحة.
A خوارزمية تعتمد على الأجزاء3 تقسم الهدف إلى أجزاء مرئية من الجسم، ولا يزال بإمكانها إجراء مطابقة من تلك الأجزاء عندما لا يكون الجسم بالكامل مرئياً.
 التعرف المستند إلى الأجزاء للأهداف المخفية جزئيًا
التعرف المستند إلى الأجزاء للأهداف المخفية جزئيًا
لماذا الأجزاء أهم من الشكل الكامل
أفكر في الأنظمة القديمة كمطابقات للأشكال. كانوا يريدون الشخص بأكمله أو المركبة بأكملها في المنظور. هذا هش. نموذج يعتمد على الأجزاء يعمل بطريقة أذكى. ينظر إلى الرأس، الكتفين، الجذع، الساقين، النوافذ، خطوط السقف، أو منطقة العجلات. إذا كانت بعض الأجزاء محجوبة، لا يزال بإمكان النموذج استخدام الأجزاء التي يمكنه رؤيتها. هذا مفيد جدًا في المواقع الخارجية مع الأشجار والأعمدة والظلال المتحركة. على سبيل المثال، إذا كان بإمكاني رؤية الجزء العلوي من الجسم، فقد يقول النموذج لا يزال، “هذا شخص”، لأن نسب الجسم البشري لا تزال واضحة. إذا كان بإمكاني رؤية مقدمة السيارة وجزء من السقف، فقد لا يزال النموذج يعرف أنها مركبة. هذه الطريقة أفضل بكثير من مطابقة البكسل البسيطة. كما أنها تساعد في المشاهد المزدحمة، حيث يتداخل هدف مع آخر. لكنني أذكر العملاء دائمًا بأن التعرف المستند إلى الأجزاء ليس مثاليًا. إذا كانت الأجزاء المرئية صغيرة جدًا، أو ضبابية جدًا، أو مشابهة جدًا للخلفية، فسيظل النموذج يعاني. في عملي، تستخدم أفضل الأنظمة منطقًا مستندًا إلى الأجزاء مع إشارات الحركة وسجل الإطارات. هذا المزيج يمنح النموذج المزيد من السياق. لا يرى مجرد إطار مجمد واحد. يرى قصة متحركة.
ما ينظر إليه النموذج عادةً
| الجزء المرئي | مفيد لتحديد هوية الشخص | مفيد لتحديد هوية المركبة |
|---|---|---|
| الرأس والكتفين | عالية | منخفضة |
| شكل الجذع | عالية | منخفضة |
| الساقين وحركة المشي | متوسط | منخفضة |
| الشبكة الأمامية أو الزجاج الأمامي | منخفضة | عالية |
| خط السقف أو اللوحة الجانبية | منخفضة | عالية |
أين يساعد منطق الأجزاء أكثر
أرى أكبر فائدة في المشاهد ذات التغطية الجزئية المتكررة. بوابة مزرعة، شجيرة على جانب الطريق، أو سياج موقع يمكن أن يحجب نفس الهدف مرارًا وتكرارًا. يتعلم النموذج المستند إلى الأجزاء أن القطع المرئية لا تزال تنتمي معًا. كما أنه يساعد عندما لا تكون زاوية الكاميرا مثالية. العديد من عمليات النشر الفعلية لا تحتوي على مناظر مثالية. قد تواجه الكاميرا طريقًا، أو بوابة، أو رصيف تحميل من الجانب. في تلك الحالات، غالبًا ما يكون شكل الكائن الكامل مفقودًا. يمنحني النموذج المستند إلى الأجزاء فرصة أفضل للحفاظ على اكتشاف مفيد. للمشترين الذين يحتاجون إلى مخرجات مستقرة في نظام إدارة المركبات7 مثل علامة فارقة8 أو السوسن الأزرق9, ، هذا مهم لأن مطابقة هوية أفضل تعني تنبيهات خاطئة أقل وفحوصات يدوية أقل.
أين لا يزال يفشل
لا أريد المبالغة في ذلك. إذا كان الهدف مخفيًا تقريبًا بالكامل، يمكن للنموذج أن يخمن بشكل خاطئ. يمكن أن تبدو سترة في الرياح كجسم. يمكن أن تبدو غصن كذراع. يمكن أن تبدو مركبة جزئية كمقطورة أو شاحنة صندوقية عندما لا تكون كذلك. لهذا السبب أقوم بالاختبار في الموقع الفعلي، وليس فقط في المختبر. يتحسن الخوارزمية عندما تتضمن بيانات التدريب نفس أنواع الأسوار والنباتات والإضاءة التي يمتلكها العميل في الموقع. هذا أحد الأسباب التي تجعل ضبط OEM و ODM مهمًا. لا ينبغي أن يكون النموذج ذكيًا فحسب. يجب ضبطه للمشهد المحدد.
هل يستخدم الذكاء الاصطناعي التنبؤ الزمني لتخمين مسار الهدف أثناء حجبه بالكامل؟
أعتمد على هذه الفكرة طوال الوقت في التتبع الخارجي. إذا اختفى الهدف للحظة، فلا ينبغي للنظام أن يتصرف بشكل أعمى.
نعم، تستخدم العديد من أنظمة تتبع الذكاء الاصطناعي التنبؤ الزمني4, ، لذا يقدرون أين يجب أن يظهر الهدف مرة أخرى بناءً على السرعة والاتجاه وتاريخ الحركة الأخير.
![]() التنبؤ الزمني أثناء الانسداد الكامل
التنبؤ الزمني أثناء الانسداد الكامل
كيف يعمل التنبؤ في الممارسة العملية
أفكر في التنبؤ الزمني كمحرك تخمين قصير المدى. يراقب النظام مكان وجود الهدف في الإطارات القليلة الماضية. يتعلم اتجاه الحركة والسرعة. بعد ذلك، عندما يختفي الهدف خلف عمود أو جدار أو شجرة كثيفة، يستمر النظام في رسم مسار متوقع. هذا لا يعني أن الذكاء الاصطناعي يرى من خلال الشيء. هذا يعني أن الذكاء الاصطناعي يقوم بأفضل تخمين لفترة قصيرة. إذا كان الشخص يمشي عادة بسرعة ثابتة، فإن التنبؤ يعمل بشكل جيد. إذا تغير الهدف فجأة أو توقف أو غير اتجاهه، يصبح التخمين أضعف. أجد هذا مفيدًا بشكل خاص في تتبع PTZ، لأن الكاميرا يمكن أن تستمر في الحركة بينما يكون الهدف مخفيًا. هذا يساعد النظام على التعافي بشكل أسرع عندما يظهر الهدف مرة أخرى. أستخدم هذا المنطق أيضًا لشرح سبب استمرار الكاميرا في متابعة شخص ما لمدة ثانية أو ثانيتين بعد خروجه عن الرؤية الواضحة. إنها ليست غلطة. إنه سلوك مخطط له. ولكن لا ينبغي أن تكون نافذة التنبؤ طويلة جدًا. إذا كانت طويلة جدًا، فقد تستمر الكاميرا في متابعة مساحة فارغة وتفوت هدفًا جديدًا. تحتفظ أفضل الأنظمة بالنافذة قصيرة وتستخدم إعادة الاكتشاف بعد الظهور مرة أخرى.
التنبؤ قصير المدى مقابل الاستعادة الكاملة
| الموقف | قيمة التنبؤ | المخاطر |
|---|---|---|
| مخفي لأقل من ثانية واحدة | مفيد جداً | منخفضة |
| مخفي لمدة 1-3 ثوانٍ | مفيد | متوسط |
| مخفي لأكثر من 3 ثوانٍ | ضعيف | أعلى |
| يغير الهدف اتجاهه خلف الغطاء | أقل فائدة | أعلى |
| يعود الهدف بالقرب من المسار المتوقع | قوي مرة أخرى | منخفضة |
لماذا هذا مهم للوظائف الخارجية
أعمل مع عملاء يستخدمون كاميرات في المزارع والبوابات وحواف الطرق والمواقع النائية. هذه الأماكن بها العديد من الانسدادات القصيرة. قد يمر عامل خلف عمود سياج. قد تختفي شاحنة خلف شجرة. قد يعبر زائر خط سياج. يساعد التنبؤ الزمني في الحفاظ على سلاسة الحدث. يقلل من فقدان المسار ويقلل من إزعاج التنبيهات. كما أنه يساعد كاميرا PTZ على البقاء على الهدف الصحيح بدلاً من القفز إلى الخلفية. بالنسبة لـ David وغيره من المشترين التقنيين، يعد هذا أمرًا كبيرًا لأن الوقت الضائع بسبب فشل المسار الخاطئ يعني المزيد من مكالمات الدعم والمزيد من زيارات الموقع. في الأماكن النائية، غالبًا ما تكون هذه التكلفة أكبر من الأجهزة نفسها.
ما الذي يجعل التنبؤ أقوى
لقد وجدت ثلاثة أشياء تساعد أكثر. أولاً، يحتاج الهدف إلى حركة واضحة قبل الانسداد. ثانيًا، يجب ألا تكون الخلفية صاخبة جدًا. ثالثًا، يحتاج المتتبع إلى ميزة إعادة تعريف جيدة عندما يعود الهدف. عندما تعمل هذه الأشياء الثلاثة معًا، يمكن للنظام التعامل مع العديد من الحالات الواقعية بشكل جيد جدًا. عندما يفشل أحدها، يصبح النظام أقل استقرارًا بكثير. لهذا السبب أقوم دائمًا باختبار التدفق الكامل، وليس فقط درجة الاكتشاف.
هل يمكنني ضبط حد “تحمل الحجب” لمنع فقدان المسار مبكرًا جدًا؟
أتلقى هذا الطلب كثيرًا من المدمجين الذين يريدون المزيد من التحكم. يريدون أن تحتفظ الكاميرا بالهدف لفترة أطول، لكنهم أيضًا لا يريدون قفلات خاطئة عشوائية.
نعم، إذا كان البرنامج يوفر إعدادًا لتحمل الانسداد، فيمكنك غالبًا رفعه للاحتفاظ بالتتبع لفترة أطول، لكنني أقوم دائمًا بضبطه بعناية لأن القيمة الأعلى يمكن أن تزيد أيضًا من الإيجابيات الخاطئة.
 ضبط عتبة تحمل الانسداد
ضبط عتبة تحمل الانسداد
لماذا لا يعد ضبط العتبة مناسبًا للجميع
أتعامل مع ضبط العتبة مثل التوازن على خط رفيع. إذا قمت بتعيين التسامح منخفضًا جدًا، فإن النظام يسقط الهدف بمجرد حظر جزء من الجسم. هذا يخلق مسارات متقطعة وإنذارات فائتة. إذا قمت بتعيينه مرتفعًا جدًا، فقد يحتفظ النظام بمسار سيئ لفترة طويلة جدًا. ثم يمكنه متابعة كائن خاطئ، وهذا يخلق ارتباكًا في نظام إدارة الفيديو (VMS). تعتمد القيمة الصحيحة على الموقع. قد تحتاج مزرعة ذات مساحة مفتوحة إلى إعداد مختلف عن بوابة مزدحمة بها الكثير من الأشخاص والمركبات. قد تحتاج منطقة بها شجيرات رفيعة إلى إعداد مختلف عن ساحة مستودع بها العديد من الأعمدة. عادةً ما أبدأ بمقاطع اختبار من البيئة الحقيقية. ثم أقوم بضبط التسامح خطوة بخطوة. أشاهد شيئين في نفس الوقت: كم مرة يفقد النظام الهدف الحقيقي، وكم مرة يحتفظ بهدف خاطئ. هذا يعطيني رؤية واضحة للمفاضلة. يجب أن يقلل الضبط الجيد من الفقد المبكر دون جعل النظام كسولًا. يجب أن يساعد الذكاء الاصطناعي على البقاء صادقًا، وليس مجرد ملتصقًا.
دليل ضبط بسيط
| خيار الضبط | التأثير على التتبع | مستوى المخاطرة |
|---|---|---|
| تسامح أقل | يسقط الهدف بشكل أسرع | مسارات فائتة |
| تسامح متوسط | سلوك متوازن | الأفضل للعديد من المواقع |
| تسامح أعلى | يحتفظ بالهدف لفترة أطول | قفلات خاطئة أكثر |
| تسامح عالٍ جدًا | تتبع ملتصق جدًا | خطر الهدف الخاطئ |
ما أوصي به قبل تغيير العتبة
عادةً ما أطلب من العملاء التحقق من إعداد الكاميرا أولاً. إذا كانت الزاوية سيئة، فلا يمكن لأي عتبة إصلاح ذلك. إذا كان الهدف صغيرًا جدًا في الإطار، فإن النموذج لديه تفاصيل قليلة جدًا. إذا كانت الإضاءة ضعيفة، فقد يفقد الذكاء الاصطناعي مخطط الجسم مبكرًا جدًا. لذلك أقوم بإصلاح المشهد قبل تغيير البرنامج. ثم أقوم بمراجعة إعداد الانسداد. أتحقق أيضًا مما إذا كان النظام يدعم التحقق متعدد الإطارات10, ، لأن ذلك يمكن أن يساعد كثيرًا. إذا كان بإمكان الذكاء الاصطناعي تأكيد هدف عبر عدة إطارات، فيمكنه البقاء على قيد الحياة في التغطية القصيرة دون السقوط بسرعة كبيرة. بالنسبة للمشترين الذين يهتمون بالاستقرار وتكلفة الخدمة المنخفضة، غالبًا ما يكون هذا النوع من الضبط هو الفرق بين النشر الجيد وصداع الدعم.
الخاتمة
يمكنني تحديد وتتبع العديد من الأهداف من خلال الانسداد الشديد، ولكن أفضل نتيجة تعتمد على الرؤية القائمة على الأجزاء، والتنبؤ بالحركة، وضبط العتبة بعناية.
1. تعلم أساسيات الذكاء الاصطناعي ودوره في رؤية الكمبيوتر. ︎↩︎ 2. استكشاف مناهج مختلفة لتتبع الفيديو وكيف يحافظ المنطق على هوية الهدف بمرور الوقت. ︎↩︎ 3. تعلم كيف تكتشف النماذج القائمة على الأجزاء الكائنات عن طريق تحديد ومطابقة المكونات المرئية. ︎↩︎ 4. فهم كيف يقدر التنبؤ الزمني (غالبًا عبر مرشحات كالمان) مواقع الأهداف المستقبلية بناءً على تاريخ الحركة. ︎↩︎ 5. تعرف على كاميرات التحريك والإمالة والتكبير وكيف يمكن استخدامها للتتبع النشط. ︎↩︎ 6. اكتشف كيف تعيد خوارزميات إعادة التعريف تعيين الهوية لهدف بعد إعادة ظهوره. ︎↩︎ 7. فهم أنظمة إدارة الفيديو ودورها في دمج خلاصات كاميرات المراقبة الأمنية. ︎↩︎ 8. قم بزيارة Milestone Systems، وهي شركة رائدة في توفير حلول VMS مفتوحة المنصة. ︎↩︎ 9. تعرف على Blue Iris، وهو برنامج مراقبة فيديو شائع لكاميرات IP. ︎↩︎ 10. تعلم كيف يحسن التحقق متعدد الإطارات الدقة عن طريق تأكيد الاكتشافات عبر الإطارات المتتالية. ︎↩︎