
Ho visto una telecamera PTZ solare 4G perfettamente stabile riavviarsi a metà streaming perché qualcuno ha premuto troppo velocemente il pulsante dello zoom 40X. Quel singolo momento di calo di tensione è costato al mio cliente un intervento tecnico in un sito remoto.
Il sistema sopprime i cali di tensione attraverso una combinazione di condensatori di bulk5 per il buffering istantaneo dell'energia, algoritmi di soft-start del motore a curva S che distribuiscono il prelievo di corrente nel tempo e regolatori Buck-Boost dedicati che isolano i moduli sensibili come il modem 4G e il SoC dai cali di tensione transitori causati dai picchi del motore PTZ.
 Soppressione della tensione della telecamera PTZ durante il movimento del motore di zoom
Soppressione della tensione della telecamera PTZ durante il movimento del motore di zoom
Di seguito, analizzo ogni livello di questo sistema di protezione. Spiegherò come il PMIC mantiene attivo il tuo modem, perché il pan-tilt-zoom simultaneo non interromperà il tuo streaming, come preveniamo arresti anomali falsi e perché l'isolamento delle guide di alimentazione del PCB è importante per la qualità dell'immagine 4K.
Indice dei contenuti
Il Power Management IC (PMIC) stabilizza la tensione per il modem 4G durante i picchi PTZ?
Ho visto modem 4G perdere la loro connessione LTE perché il motore di zoom ha sottratto abbastanza tensione per un tempo sufficiente. Succede in millisecondi e il modem lo tratta come un'interruzione di corrente.
Sì. Il PMIC utilizza un convertitore Buck-Boost ad alta efficienza1 per mantenere una guida stabile da 3,3 V per il modem 4G, anche quando la tensione della batteria principale cala durante l'avvio del motore PTZ. Questo stadio di regolazione dedicato funge da buffer tra il carico rumoroso del motore e il modulo cellulare sensibile.
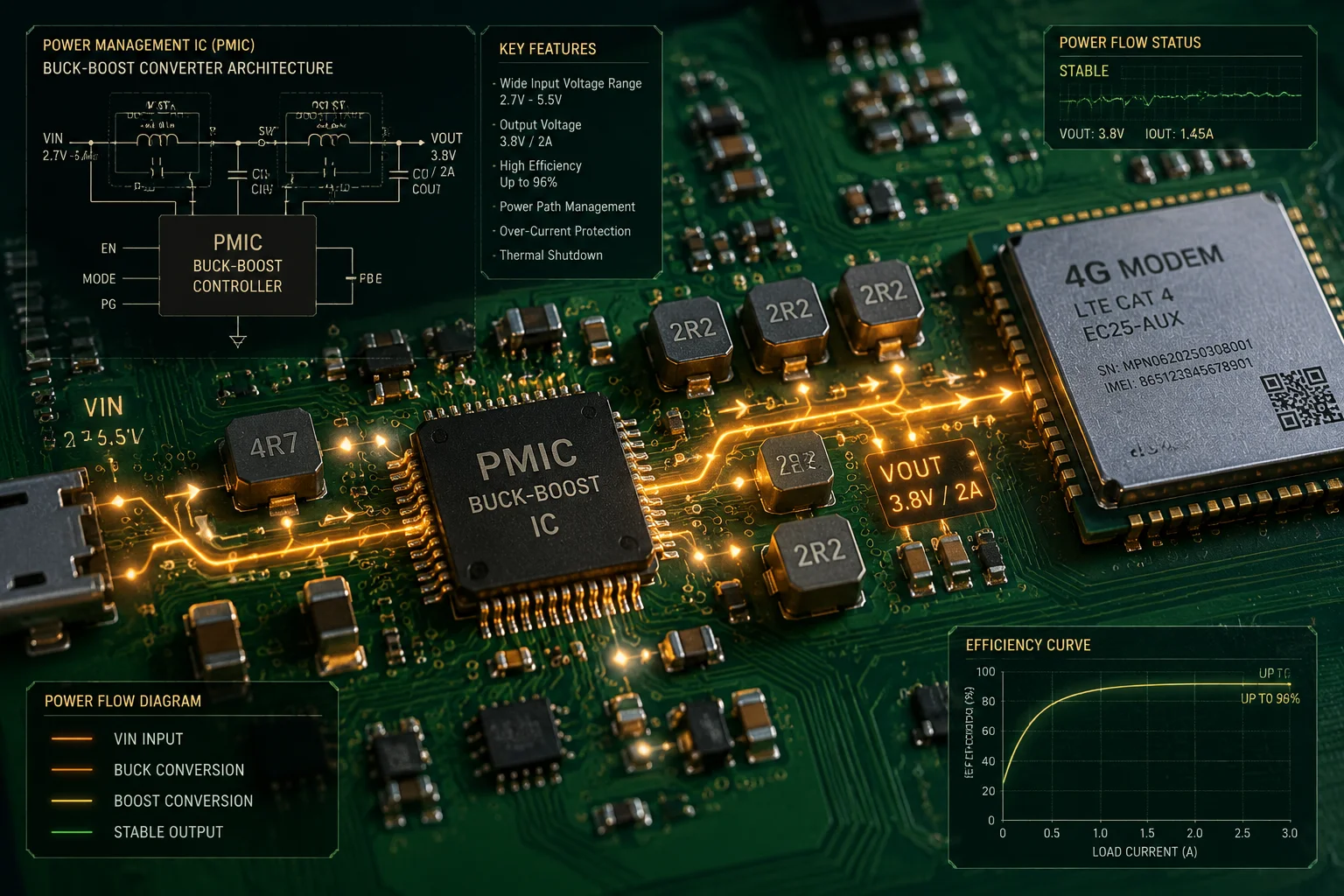 PMIC che stabilizza la tensione per il modem 4G durante la corrente di picco del motore PTZ
PMIC che stabilizza la tensione per il modem 4G durante la corrente di picco del motore PTZ
Come funziona effettivamente il PMIC in questo contesto
A Il Power Management IC (PMIC)2 non è solo un singolo regolatore di tensione. Nel nostro design della telecamera PTZ, è un chip multi-uscita che prende l'ingresso della batteria (tipicamente 12V) e crea diverse uscite regolate e indipendenti. Ogni uscita serve un sottosistema diverso.
Il modem 4G necessita di un'alimentazione pulita e stabile da 3,3 V. Il SoC necessita di guide da 1,2 V e 1,8 V. Il driver del motore necessita dei 12 V completi. Il PMIC gestisce tutto questo da un'unica fonte di ingresso.
Perché la topologia Buck-Boost è importante
Un semplice convertitore Buck (step-down) fallisce quando la tensione di ingresso scende al di sotto della tensione di uscita. Durante un'operazione di zoom intensiva, la tensione della batteria può scendere momentaneamente da 12V a 10V o anche meno. Un convertitore Buck-Boost funziona in entrambe le direzioni. Può abbassare la tensione quando la batteria è carica e alzarla quando la batteria si scarica. Ciò significa che l'uscita a 3,3V rimane a 3,3V indipendentemente da ciò che il motore sta facendo alla linea principale.
La strategia di disaccoppiamento
Tra l'uscita del PMIC e l'ingresso del modem 4G, posizioniamo condensatori di disaccoppiamento aggiuntivi. Si tratta di piccoli condensatori ceramici (tipicamente da 10µF a 100µF) posizionati fisicamente vicino ai pin di alimentazione del modem. Agiscono come un filtro finale, catturando qualsiasi rumore ad alta frequenza che passa attraverso il PMIC.
| Componente | Ruolo | Perché è importante |
|---|---|---|
| PMIC Buck-Boost | Mantiene un'uscita stabile in un ampio intervallo di ingresso | Previene il brownout del modem durante i picchi del motore |
| Condensatori di disaccoppiamento ceramici | Filtra il ripple ad alta frequenza all'ingresso del modem | Impedisce al rumore EMI del PWM del motore di raggiungere il modem |
| Perla di ferrite | Blocca il rumore condotto sulla traccia di alimentazione | Isola il rumore di commutazione del motore dalla linea del modem |
| Circuito UVLO | Si spegne gradualmente al di sotto della soglia di sicurezza | Previene la corruzione dei dati da alimentazione instabile |
Validazione nel mondo reale
Nei nostri test, simuliamo scenari peggiori. Comandiamo uno zoom 40X a piena velocità mentre la batteria è al 30% di carica e il modem 4G è a metà caricamento. Monitoriamo la linea di alimentazione del modem con un oscilloscopio. Il ripple accettabile è inferiore a 50mV picco-picco. Se supera tale valore, il modem potrebbe perdere pacchetti o perdere la registrazione con la torre cellulare.
David, per le tue implementazioni in Nord America, ciò significa che la tua telecamera continua a trasmettere anche quando un operatore di sicurezza effettua uno zoom rapido su una targa. Il modem non vede mai il caos di tensione che si verifica sul lato motore della scheda.
Il mio streaming video tremolerà o si riavvierà se muovo contemporaneamente lo zoom e l'inclinazione?
Un mio cliente mi ha chiamato frustrato perché ogni volta che il suo operatore muoveva la telecamera e zoomava contemporaneamente, il feed live si bloccava per due secondi. Pensava che la telecamera fosse rotta. Non lo era. Il sistema di alimentazione era semplicemente progettato male.
No. Il nostro firmware utilizza un Interleaving di fase4 strategia che scaglionata gli avvii dei motori di 20-50 millisecondi, prevenendo un assorbimento di corrente di picco simultaneo. Combinato con il buffering del condensatore di bulk, il codificatore video e il modem 4G mantengono un'alimentazione ininterrotta anche durante comandi PTZ multi-asse aggressivi.
 Stabilità del flusso video durante il movimento simultaneo di pan, tilt e zoom
Stabilità del flusso video durante il movimento simultaneo di pan, tilt e zoom
Comprendere il problema del “doppio picco”
Ogni asse PTZ ha il suo motore. Il motore di pan, il motore di tilt e il motore di zoom possono tutti ricevere comandi contemporaneamente. Se tutti e tre iniziano a muoversi nello stesso istante esatto, le loro correnti di avviamento si sommano. Un singolo motore potrebbe assorbire 2A all'avvio. Tre motori che partono insieme assorbono 6A. Su un sistema a batteria solare con una potenza nominale di 8A continui, questo picco di 6A in aggiunta alla linea di base di 2A (SoC + modem + sensore) spinge il sistema al limite.
Come l'interleaving di fase risolve questo problema
Il firmware non avvia mai tutti i motori nello stesso millisecondo. Quando arriva un comando “vai al preset” che richiede movimento di pan, tilt e zoom, il sistema li mette in coda:
- T = 0 ms: Il motore di pan inizia la rampa di soft-start
- T = 30 ms: Il motore di tilt inizia la rampa di soft-start
- T = 60 ms: Il motore di zoom inizia la rampa di soft-start
Quando il motore di zoom inizia ad assorbire corrente, il motore di pan ha già superato la sua fase di picco di avviamento e si è stabilizzato sulla corrente di funzionamento costante. I picchi non si sovrappongono mai.
Il profilo di accelerazione a curva S
Anche all'interno dell'avviamento di ciascun motore, la corrente non salta istantaneamente. Il firmware utilizza un profilo di accelerazione a curva S3. Pensalo come un'auto che accelera dolcemente da ferma invece di premere a fondo il pedale dell'acceleratore. Il duty cycle PWM aumenta seguendo una funzione sigmoide. Questo distribuisce l'assorbimento di corrente su 50-100 millisecondi invece di raggiungere il picco in meno di 5 millisecondi.
Cosa succede alla pipeline video
Il codificatore video (all'interno del SoC) ha il suo dedicato regolatore a basso dropout (LDO)8. Anche se la linea principale da 5V scende leggermente, l'LDO assorbe questa variazione ed emette un segnale pulito da 1,8V al core dell'encoder. Anche il sensore 4K si trova dietro il proprio regolatore. Pertanto, la pipeline dell'immagine è doppiamente isolata dal rumore del motore.
Il risultato: nessun frame perso, nessun reset dell'encoder, nessuna interruzione dello streaming. L'operatore vede un video fluido e continuo mentre comanda complessi movimenti PTZ.
Test dello scenario peggiore
Testiamo questo mediante la creazione di script di tour rapidi preimpostati. La telecamera cicla tra 8 preset senza tempo di permanenza, forzando un movimento costante su più assi. Eseguiamo questo test per 72 ore consecutive con alimentazione a batteria. Se lo streaming si interrompe anche una sola volta, il team firmware regola la temporizzazione dell'interleaving o aumenta la durata della rampa di soft-start.
Come si impedisce che il “calo di tensione” della batteria causi un falso arresto per “bassa potenza”?
Una volta ho eseguito il debug di un sistema che continuava a spegnersi a “40% batteria”. La batteria andava bene. Il BMS leggeva la tensione di caduta durante il movimento del motore e il panico. Pensava che la batteria fosse scarica quando in realtà era solo sotto carico pesante.
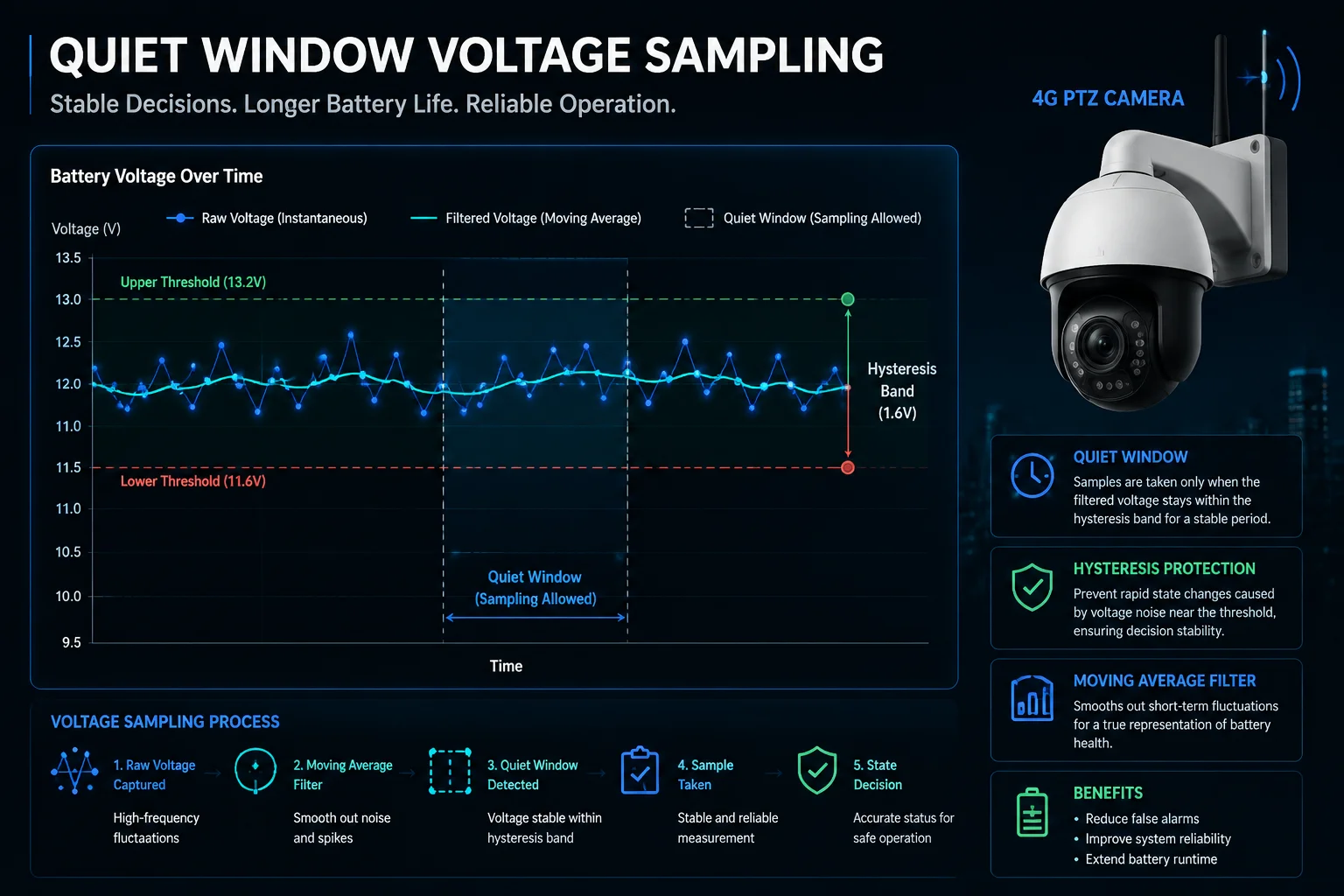
Preveniamo falsi spegnimenti campionando la tensione della batteria solo durante i periodi di inattività del motore, applicando un filtro a media mobile alle letture di tensione e impostando la soglia di bassa potenza con una banda di isteresi che tiene conto della caduta prevista sotto carico. Il sistema distingue tra batteria effettivamente scarica e temporanea caduta di tensione.
 Prevenzione caduta tensione batteria falso spegnimento bassa potenza telecamera PTZ
Prevenzione caduta tensione batteria falso spegnimento bassa potenza telecamera PTZ
La causa principale dei falsi spegnimenti
La tensione ai capi di una batteria al litio scende sotto carico. Questa è fisica normale. La batteria ha una resistenza interna. Quando la corrente scorre attraverso quella resistenza, la tensione scende (legge di Ohm: V = I × R). Una batteria che mostra 12,0 V a riposo potrebbe mostrare 11,2 V quando eroga 5 A ai motori. Se il firmware legge la tensione durante quel prelievo di 5 A e la confronta con una soglia statica (ad esempio, 11,0 V = spegnimento), potrebbe attivare un falso allarme.
Campionamento intelligente della tensione
Il nostro firmware utilizza una tecnica che chiamo “campionamento a finestra silenziosa”. Il sistema sa quando i motori sono attivi perché li comanda. Pertanto, acquisisce le letture della tensione della batteria solo durante i periodi in cui nessun motore è in movimento. Se la telecamera è in movimento continuo (come durante un tour di pattuglia), il firmware attende la breve pausa tra le transizioni dei preset per acquisire un campione di tensione pulito.
La banda di isteresi
| Stato della batteria | Soglia di tensione | Azione |
|---|---|---|
| Operazione Normale | Sopra 11,5 V (a riposo) | Tutti i sistemi attivi |
| Avviso di bassa potenza | Sotto 11,5 V per 30 secondi | Riduci le attività non essenziali |
| Critico Basso | Sotto 10,8V per 60 secondi | Sequenza di spegnimento controllato |
| Ripristino | Sopra 12,0V per 10 secondi | Riprendi il normale funzionamento |
Notare la differenza tra la soglia di spegnimento (10,8V) e la soglia di ripristino (12,0V). Questa è l'isteresi. Impedisce al sistema di passare rapidamente dallo spegnimento al ripristino.
Filtro Media Mobile
Il firmware mantiene una media mobile degli ultimi 10 campioni di tensione, ciascuno prelevato a intervalli di 5 secondi durante le finestre di inattività. Una singola lettura bassa non innesca nulla. La media deve rimanere al di sotto della soglia per un periodo prolungato. Questo elimina i falsi trigger dovuti a brevi eventi transitori.
Coordinamento BMS
Per le installazioni di David che utilizzano pacchi batteria esterni, raccomandiamo un Sistema di Gestione della Batteria (BMS)9 con un cutoff di scarica non superiore a 10,0V (per un sistema da 12V). Questo dà alla logica interna della fotocamera spazio per gestire uno spegnimento controllato prima che il BMS interrompa bruscamente l'alimentazione. Se la soglia del BMS è impostata troppo vicina alla soglia della fotocamera, si verifica una condizione di competizione in cui entrambi cercano di spegnersi contemporaneamente, potenzialmente corrompendo le riprese salvate.
Il Requisito di Scarica di 10A
David, questo è fondamentale per le tue fotocamere 40X. Il BMS deve supportare almeno 10A di scarica istantanea. Molti controller solari per batterie disponibili in commercio sono classificati per 3-5A. Va bene per una fotocamera statica. Ma una PTZ 40X con pan, tilt, zoom e illuminatore IR può assorbire brevemente 8-9A. Se il tuo BMS non è in grado di gestirlo, interromperà l'alimentazione e incolperai la fotocamera. La fotocamera va bene. Il BMS è il collo di bottiglia.
Ci sono guide di alimentazione dedicate sul PCB per isolare i motori rumorosi dal sensore 4K?
Ho imparato questa lezione all'inizio della mia carriera. Una singola traccia di alimentazione condivisa tra un motore passo-passo e un sensore di immagine creava bande orizzontali in ogni fotogramma. Il rumore veniva condotto direttamente attraverso il piano di alimentazione nei circuiti analogici del sensore.
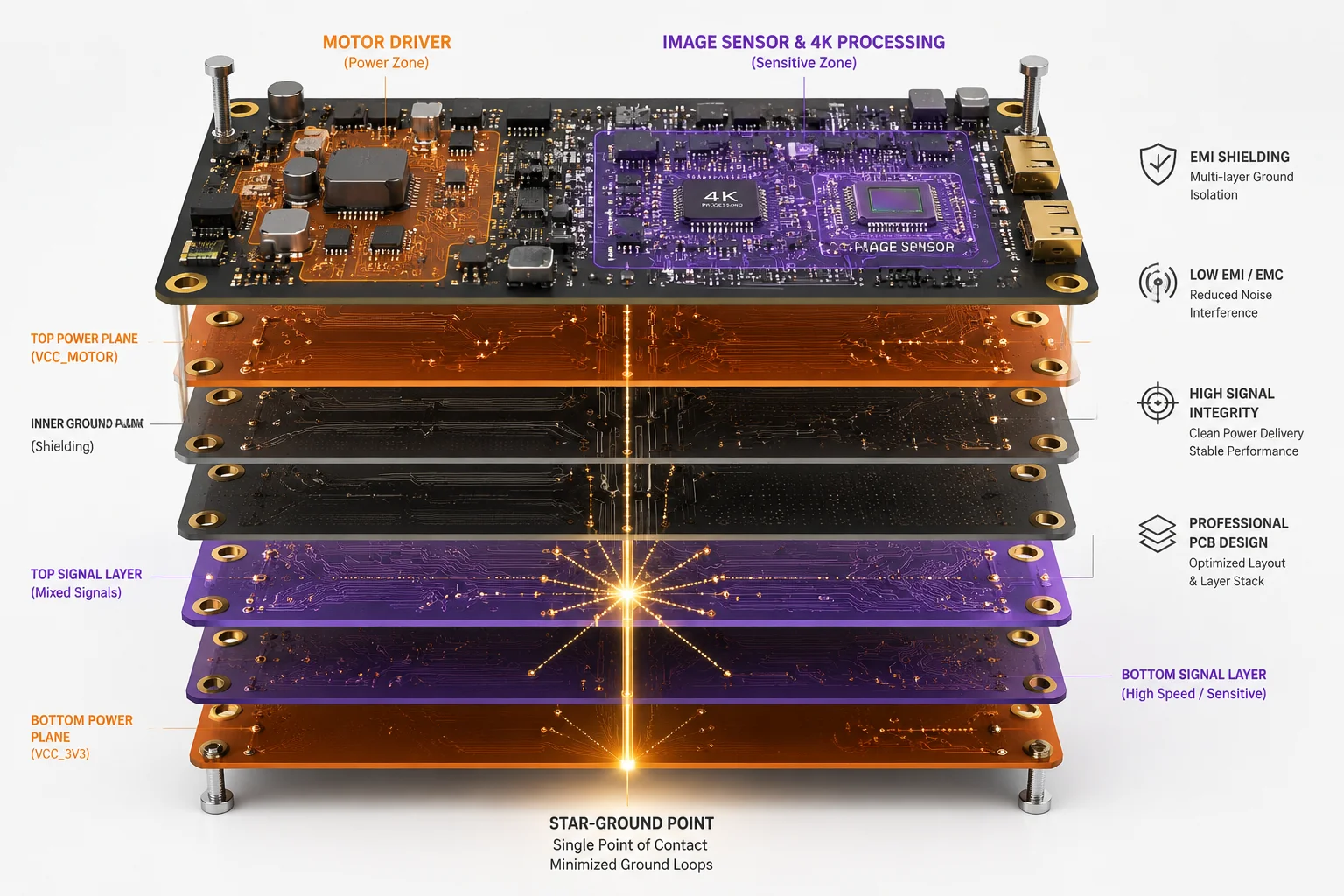
Sì. Il nostro PCB utilizza piani di alimentazione fisicamente separati con riempimenti di rame dedicati per la sezione del driver del motore, la sezione del modem 4G e la sezione di imaging. Ogni sezione ha il proprio stadio di regolazione e i piani di massa sono collegati in un unico punto di massa a stella per prevenire interferenze da loop di massa.
 Binari di alimentazione dedicati del PCB che isolano i motori dal sensore 4K
Binari di alimentazione dedicati del PCB che isolano i motori dal sensore 4K
Perché l'isolamento dei binari di alimentazione è non negoziabile per il 4K
Un sensore di immagine 4K opera con segnali analogici estremamente piccoli. Le tensioni dei pixel lette sono nell'ordine dei millivolt. Un driver motore che commuta a 20kHz genera interferenze elettromagnetiche (EMI) che possono facilmente accoppiarsi in quei piccoli segnali. Il risultato è rumore visibile nell'immagine: banding, esposizione tremolante o artefatti di colore.
L'Architettura PCB a Tre Zone
Il nostro PCB è diviso in tre zone di alimentazione distinte:
Zona 1: Alimentazione Motore Questa zona gestisce i segnali ad alta corrente e rumorosi. L'IC del driver del motore, i connettori del motore e i condensatori di filtro si trovano qui. Le tracce di rame sono larghe (per gestire 3-5A) e corte (per minimizzare l'induttanza). Questa zona ha il suo piano di massa che si collega alla massa principale in un punto specifico.
Zona 2: Digitale/Comunicazione Il modem 4G, il SoC, la memoria e lo storage si trovano qui. Questa zona riceve alimentazione pulita e regolata dal PMIC. Ha il suo piano di massa. La linea di alimentazione dell'antenna 4G è instradata il più lontano possibile dalla Zona 1.
Zona 3: Analogico/Imaging Il sensore 4K, il suo generatore di clock e il front-end analogico si trovano qui. Questa è la zona più sensibile. Riceve l'alimentazione più pulita, spesso tramite un regolatore LDO dedicato a bassissimo rumore. Il piano di massa qui è solido e ininterrotto, senza tracce digitali ad alta velocità che lo attraversano.
Topologia di Massa a Stella
Il topologia di massa a stella6 l'approccio significa che tutte e tre le zone collegano i loro piani di massa in un unico punto vicino al connettore di ingresso della batteria. La corrente di ritorno del motore scorre attraverso il suo percorso dedicato e non passa mai sotto il sensore o il modem.
Separazione Fisica sulla Scheda
Oltre all'isolamento elettrico, manteniamo la distanza fisica. L'IC del driver del motore si trova all'estremità opposta del PCB rispetto al sensore di immagine. Il connettore dell'antenna del modem 4G si trova su un bordo diverso della scheda rispetto ai connettori del motore. Ciò riduce l'accoppiamento condotto e irradiato.
Schermatura EMI
In alcuni dei nostri modelli di fascia alta, aggiungiamo metallo schermatura EMI7 (piccole scatole di latta saldate su sezioni sensibili). Il modulo modem 4G ha spesso una propria schermatura. Il circuito di clock del sensore di immagine può avere una schermatura. Questi bloccano le emissioni irradiate dal driver del motore dal raggiungere componenti sensibili attraverso l'aria.
David, per le tue fotocamere 40X che catturano targhe a 200 metri, la qualità dell'immagine è tutto. Una linea di alimentazione rumorosa degraderebbe la tua risoluzione effettiva. Il nostro isolamento delle linee garantisce che il sensore 4K fornisca frame puliti e nitidi indipendentemente da ciò che stanno facendo i motori.
Conclusione
La soppressione dei cali di tensione nelle fotocamere solari PTZ richiede una difesa a strati: condensatori di filtro per energia istantanea, soft-start a curva S per il controllo della corrente, regolazione PMIC intelligente per l'isolamento dei moduli e interleaving di fase per prevenire la sovrapposizione dei picchi. Ogni strato protegge il successivo.
1. Un convertitore Buck-Boost può aumentare o diminuire la tensione, mantenendo un'uscita stabile nonostante il calo della tensione di ingresso. ︎↩︎ 2. Il PMIC integra più regolatori di tensione e funzioni di gestione per diversi sottosistemi. ︎↩︎ 3. Le rampe di accelerazione a curva a S aumentano gradualmente la velocità del motore nel tempo, riducendo i picchi di corrente. ︎↩︎ 4. La sfalsatura dei tempi di avvio del motore impedisce sovrapposizioni di correnti di picco da motori multipli. ︎↩︎ 5. I condensatori di bulk immagazzinano energia per fornire istantaneamente corrente durante l'avvio del motore, riducendo il calo di tensione. ︎↩︎ 6. La messa a terra a stella collega più piani di massa in un unico punto per evitare loop di massa. ︎↩︎ 7. Gli schermi EMI bloccano le interferenze irradiate dai driver del motore per proteggere i componenti sensibili. ︎↩︎ 8. L'LDO fornisce una tensione pulita e stabile con un dropout minimo, isolando i sensori sensibili dal rumore della linea. ︎↩︎ 9. Il BMS monitora e protegge la batteria; il suo cutoff di scarica deve essere compatibile con le soglie della fotocamera. ︎↩︎