
Vedo spesso i team perdere fiducia quando una telecamera PTZ si muove e le regole sembrano perdere di senso. Voglio che le mie linee di recinzione rimangano esattamente dove si trova il mondo reale.
Sì, regole collegate ai preset7 possono passare automaticamente, ma un vero cambio automatico richiede una telecamera che supporti la mappatura dinamica delle coordinate8. La maggior parte dei sistemi PTZ mantiene le regole legate ai preset, mentre i sistemi di fascia alta possono tracciare le modifiche di pan, tilt e zoom e mantenere allineate le linee virtuali.
 Mappatura del perimetro virtuale PTZ e delle regole
Mappatura del perimetro virtuale PTZ e delle regole
Quando confronto progetti reali, vedo due risultati molto diversi. Alcuni sistemi funzionano bene solo nelle posizioni preimpostate. Altri mantengono le regole attaccate alla scena anche mentre l'obiettivo si muove, ma ciò richiede hardware migliore, firmware più intelligente e una buona calibrazione.
Indice dei contenuti
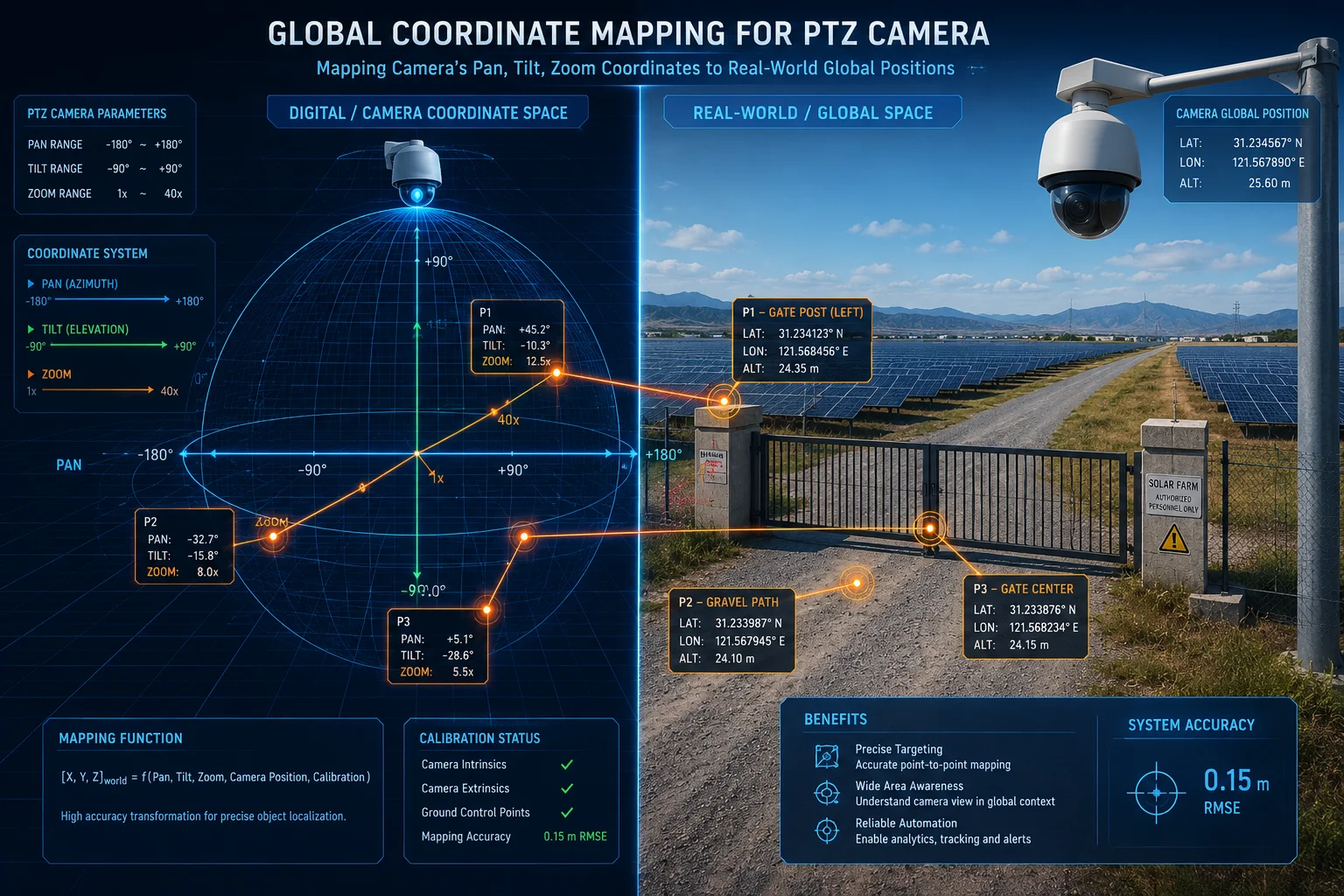
La “Mappatura delle Coordinate Globali” garantisce che le mie linee di recinzione rimangano allineate con il mondo fisico?
Ho visto questa domanda sorgere spesso, perché nessuno vuole un recinto virtuale che fluttui via dal cancello. Voglio che la linea rimanga sulla strada, sulla recinzione o sul cortile, non che si sposti sullo schermo.
La mappatura delle coordinate globali può mantenere le linee di recinzione allineate con il mondo fisico se la telecamera dispone di un feedback di posizione reale, una buona calibrazione e un potente motore di mappatura. Non è solo uno strumento di disegno. È un modo per collegare ogni regola a una posizione spaziale fissa.
 Mappatura delle coordinate globali per le regole PTZ
Mappatura delle coordinate globali per le regole PTZ
Penso che il punto chiave sia semplice: la mappatura globale è valida solo quanto i dati su cui si basa. Se la telecamera conosce il suo angolo di pan, angolo di tilt, livello di zoom1 e punto di riferimento con sufficiente precisione, può proiettare la stessa regola in ogni nuova visuale. Ecco perché la linea può sembrare “muoversi” sullo schermo, ma in realtà rimane nello stesso posto nel mondo reale. In pratica, ciò significa che posso disegnare un recinto virtuale una volta e poi lasciare che la telecamera continui ad aggiornare il lato dell'immagine di quel recinto mentre l'obiettivo ruota. Ma devo anche stare attento. Piccoli errori meccanici, ingranaggi allentati, encoder deboli o una scarsa calibrazione di fabbrica possono rompere la corrispondenza tra l'immagine e il terreno. Se il sistema perde il suo riferimento, la linea può derivare un po' all'inizio e molto dopo. Ecco perché tratto sempre questa funzionalità come un mix di software e meccanica. Il software può mappare il mondo. L'hardware deve dire la verità su dove sta puntando l'obiettivo. Per un progetto come un sito solare 4G o un ampio cancello di una fattoria, questo è ancora più importante perché la telecamera può muoversi molte volte al giorno.
Cosa controllo prima di fidarmi di un sistema di mappatura
| Elemento di controllo | Perché è importante | Cosa voglio vedere |
|---|---|---|
| Feedback Pan/Tilt | La telecamera deve conoscere la sua posizione esatta | Encoder stabile o controllo di posizione robusto |
| Feedback dello zoom | La forma della regola cambia con il campo visivo | Segnalazione accurata dello zoom |
| Posizione Home | Il sistema necessita di un punto di base fisso | Comportamento affidabile di ritorno alla posizione Home |
| Processo di calibrazione | La mappatura deve corrispondere alla scena reale | Impostazione semplice ma ripetibile |
| Controllo della deriva a lungo termine | Le regole devono rimanere corrette nel tempo | Supporto per controllo automatico o ricalibrazione |
Le regole virtuali verranno ricalibrate istantaneamente dopo un movimento PTZ manuale o una chiamata a un preset?
So che questo può sembrare rischioso quando muovo una PTZ a mano e poi mi aspetto che le regole tengano il passo. Non voglio ritardi, perché un ritardo può significare eventi persi o falsi allarmi.
In un sistema ben progettato, le regole possono aggiornarsi subito dopo una chiamata a un preset, ma il movimento manuale della PTZ è meno affidabile. I movimenti preset sono più facili da tracciare perché la telecamera conosce il punto di destinazione, mentre i movimenti manuali potrebbero richiedere un nuovo punto di aggancio o un breve passaggio di risincronizzazione.
 Ricalibrazione delle regole preset PTZ
Ricalibrazione delle regole preset PTZ
Di solito divido questo in due casi. Il primo caso è il movimento da preset a preset. Questo è il percorso più pulito. La telecamera sa già dove si trovano il preset 1, il preset 2 e il preset 3. Quindi, quando chiamo un preset, il firmware può cambiare le regole correlate o riproiettare la recinzione mappata quasi istantaneamente. Il secondo caso è il movimento manuale tramite joystick, app o controllo VMS. Qui, il sistema potrebbe non sapere se mi sono fermato in un posto valido, se ho attraversato una zona cieca o se lo zoom è cambiato durante il movimento. Quindi alcune telecamere aspettano che il movimento si fermi e poi ricaricano i dati spaziali. Alcune telecamere si aggiornano solo dopo un breve ritardo. Alcune telecamere non si aggiornano affatto bene a meno che l'operatore non riporti la telecamera a un preset noto. Ecco perché chiedo sempre al fornitore come il dispositivo gestisce il controllo live, le chiamate preset e i percorsi di pattugliamento. Chiedo anche se la ricalibrazione avviene ad ogni movimento o solo al ritorno alla posizione Home. Per i lavori B2B, questo dettaglio è importante perché il cliente non si preoccupa della teoria. Al cliente interessa se la regola rimane attiva quando la guardia preme “home”, “preset 5” o una scansione manuale.
Comportamento tipico dopo il movimento
| Tipo di movimento | Velocità di aggiornamento delle regole | Livello di rischio | La mia visione pratica |
|---|---|---|---|
| Richiamo preimpostato | Veloce | Basso | Ideale per un cambio di regole stabile |
| Tour di pattugliamento | Da medio a veloce | Medio | Richiede una buona logica del firmware |
| Movimento manuale con joystick | Varia | Più alto | Spesso richiede risincronizzazione |
| Ritorno a casa | Veloce e stabile | Basso | Momento migliore per la ricalibrazione |
Come si previene il “Rule Drifting” dopo migliaia di cicli di panning e tilting?
Sono preoccupato per la deriva in qualsiasi sistema in movimento, perché piccoli errori possono crescere nel tempo. Una telecamera può sembrare a posto il primo giorno e diventare comunque un problema dopo molte settimane di movimento.
La deriva delle regole viene prevenuta da una robusta progettazione meccanica, encoder accurati, correzione regolare della posizione di partenza e talvolta calibrazione automatica visiva. L'obiettivo è mantenere la mappa software legata all'angolo reale dell'obiettivo a lungo termine.
 Prevenire la deriva delle regole PTZ
Prevenire la deriva delle regole PTZ
Vedo la deriva delle regole come una lenta perdita di fiducia tra la telecamera e il mondo. La telecamera può ancora muoversi, ma la sua idea interna di dove punta non corrisponde più alla scena reale. Ciò può accadere a causa di usura degli ingranaggi, vibrazioni, cambiamenti di temperatura, cicli di pattugliamento ripetuti o calibrazione debole. Per combattere questo, voglio più di uno strato di protezione. Innanzitutto, voglio un buon motore e un solido codificatore3. Se la telecamera non riesce a misurare bene la propria posizione, nessun software può salvarla. In secondo luogo, voglio un chiaro posizione di partenza2 che il dispositivo può tornare spesso. Questo fornisce al sistema un punto fisso di confronto. In terzo luogo, voglio che il firmware supporti auto-controlli periodici. Alcuni sistemi possono confrontare punti di riferimento visivi, come pali, muri o angoli di cancelli, e quindi correggere piccoli scostamenti. In quarto luogo, voglio che il team di installazione testi il dispositivo sotto stress di movimento reale, non solo in laboratorio. Per un PTZ solare in un sito remoto, questo è ancora più importante, perché la telecamera può funzionare tutto il giorno, affrontare il vento e continuare a ruotare in modalità di pattugliamento. Chiedo anche se il fornitore ha un limite di deriva6, un metodo di azzeramento o un intervallo di manutenzione. Queste sono domande semplici, ma mi dicono se il prodotto è costruito per un uso prolungato o solo per una demo.
La mia checklist per il controllo della deriva
| Metodo di controllo | Cosa fa | La mia nota |
|---|---|---|
| Feedback dell'encoder | Traccia la posizione dell'obiettivo | Deve essere accurato |
| Ritorno alla posizione di partenza | Blocca nuovamente il punto di base | Molto importante |
| Ricalibrazione visiva | Utilizza punti di riferimento della scena | Utile per la stabilità a lungo termine |
| Test del limite di pattugliamento | Sottopone a stress il sistema di movimento | Aiuta a esporre un design debole |
| Intervallo di manutenzione | Mantiene il sistema onesto | Meglio per siti remoti |
Questa funzionalità è compatibile con piattaforme VMS di terze parti come Milestone o Blue Iris?
Mi preoccupo sempre dell'adattamento della piattaforma, perché anche una telecamera potente può diventare un prodotto scadente se non riesce a integrarsi nel sistema già in uso dal cliente.
La compatibilità dipende dalla capacità del VMS di leggere i dati PTZ e i metadati della telecamera. Se la telecamera supporta ONVIF, RTSP e i messaggi di evento o regola appropriati, le piattaforme di terze parti potrebbero funzionare bene, ma la mappatura dinamica avanzata non è sempre completamente esposta.
 Compatibilità VMS di terze parti per regole PTZ
Compatibilità VMS di terze parti per regole PTZ
Considero il supporto VMS come due domande separate. La prima domanda riguarda video e controllo di base. La telecamera può trasmettere video? Il VMS può muovere l'obiettivo? Può richiamare preset? Se la risposta è sì, il progetto può spesso procedere. La seconda domanda riguarda l'intelligenza delle regole. Il VMS può comprendere il perimetro virtuale, la mappa in movimento, il set di regole collegato ai preset o i dati di coordinate dinamiche? Questa parte è molto più difficile. Alcune piattaforme VMS vedono la telecamera solo come sorgente video e dispositivo PTZ. Non comprendono appieno le posizioni delle regole che cambiano con pan, tilt e zoom. In tal caso, la telecamera potrebbe comunque funzionare, ma la funzionalità delle regole intelligenti potrebbe rimanere all'interno della telecamera stessa. Ecco perché chiedo sempre un test con il VMS esatto utilizzato dal cliente. Pietra miliare4 e Iris blu5 entrambi possono essere utili, ma la vera risposta dipende dal modello, dal firmware, dal supporto del protocollo e da come la telecamera invia i metadati. Per gli integratori di sistemi, questo è un grosso problema perché un progetto può fallire all'ultimo passaggio se la telecamera e il VMS non parlano la stessa lingua. Penso che il percorso più sicuro sia verificare il supporto del profilo ONVIF, la mappatura dei comandi PTZ, la gestione degli eventi e la visualizzazione delle regole prima di un ordine all'ingrosso.
Cosa verifico con un test VMS
| Punto di test | Perché lo testo | Buon risultato |
|---|---|---|
| Flusso video live | Connessione di base | Video stabile con basso ritardo |
| controllo PTZ | Movimento remoto | Controllo manuale e preset fluidi |
| Uscita eventi | Logica allarmi | Gli eventi compaiono in tempo |
| Supporto metadati | Regole intelligenti | I dati sono leggibili dal VMS |
| Visualizzazione delle regole | Fiducia dell'operatore | Le regole rimangono visibili e utilizzabili |
Conclusione
Mi fido delle regole collegate ai preset per lavori semplici, ma mi affido al mapping e alla calibrazione dinamici solo quando l'hardware, il firmware e il VMS della telecamera lo supportano bene.
1. Riferimento per i fondamenti delle coordinate PTZ e come influenzano il posizionamento delle regole. ︎↩︎ 2. Leggi sull'utilizzo di una posizione fissa di home come riferimento per la ricalibrazione. ︎↩︎ 3. Informazioni di base sui codificatori rotativi utilizzati per misurare la posizione dell'obiettivo PTZ. ︎↩︎ 4. Scopri come Milestone XProtect integra telecamere PTZ di terze parti con regole virtuali. ︎↩︎ 5. Esamina le funzionalità di Blue Iris per la gestione delle regole PTZ e l'analisi dei metadati. ︎↩︎ 6. Verifica i limiti di deriva specificati dal produttore per l'accuratezza a lungo termine delle PTZ. ︎↩︎ 7. Comprendi come le posizioni preimpostate attivano automaticamente specifiche regole virtuali. ︎↩︎ 8. Scopri come il mapping dinamico delle coordinate mantiene le linee virtuali allineate durante il movimento PTZ. ︎↩︎