
Je vois souvent des équipes pousser les systèmes PTZ trop fort, et ensuite elles manquent le meilleur plan ou surchargent la file d'attente. Je me concentre sur l'équilibre, car un bon suivi dépend à la fois de la vitesse de l'IA et du contrôle PTZ.
Le système peut généralement détecter 30 à 60 cibles dans une seule image et conserver 8 à 16 cibles dans une file d'attente d'instantanés pour l'exécution PTZ. Le nombre exact dépend de la puissance du SoC1, de la densité de la scène et des règles de planification PTZ que vous définissez.
 File d'attente d'instantanés PTZ et suivi des cibles
File d'attente d'instantanés PTZ et suivi des cibles
J'utilise ce type de conception lorsque j'ai besoin à la fois d'une vue large et de plans de détails rapides. Si vous voulez savoir comment fonctionne la file d'attente en temps réel, je la détaille ci-dessous.
Table des matières
Le système peut-il suivre les “5 meilleures” cibles les plus suspectes tout en maintenant une vue panoramique ?
Je connais bien ce problème, car une scène large cache souvent la cible la plus importante, juste sous vos yeux. Je veux garder la vue complète, mais je dois aussi rester sur la cible la plus risquée.
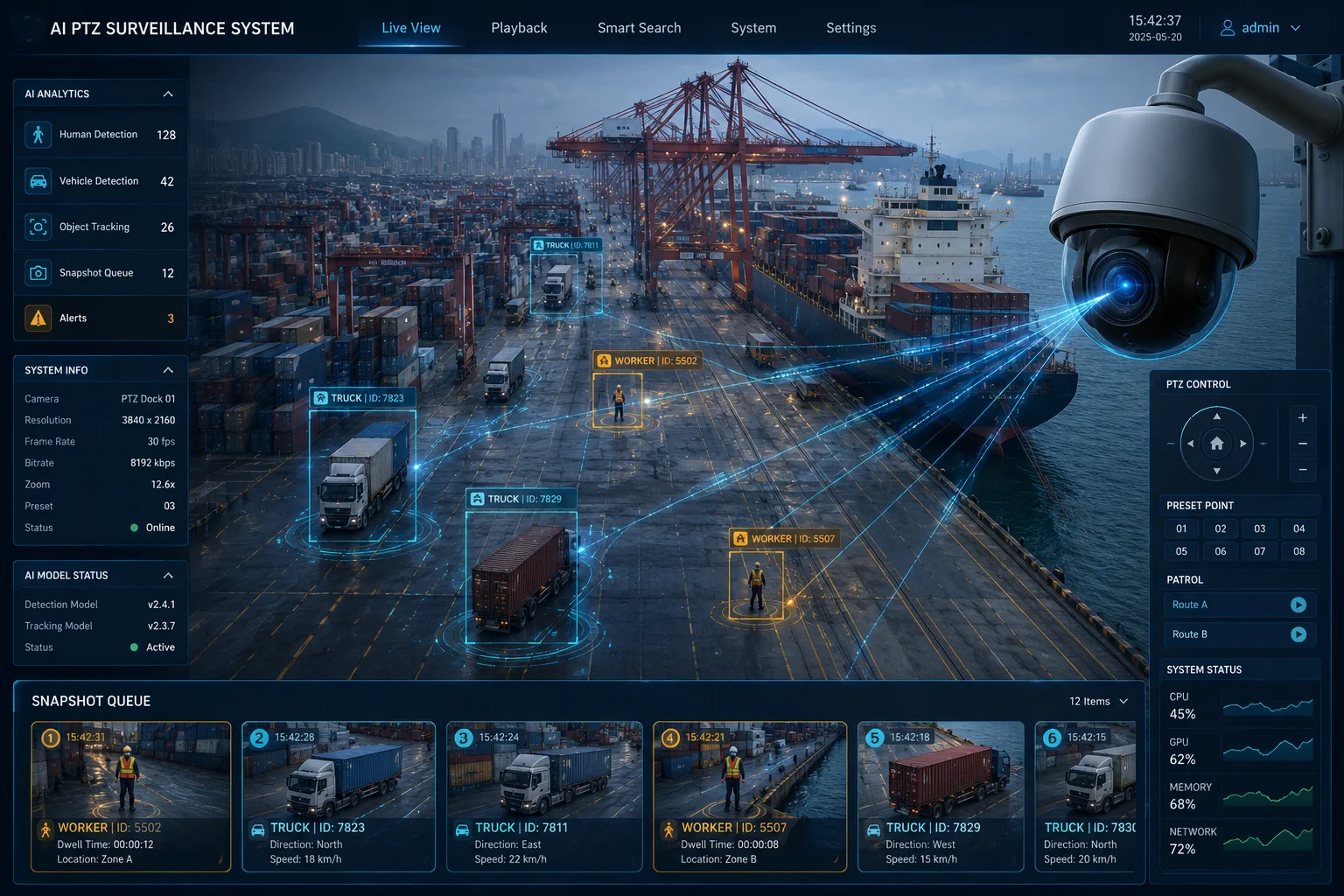
Le système peut suivre les 5 cibles suspectes principales tout en conservant une vue d'ensemble panoramique grâce à une logique à double couche. La vue fixe conserve toute la scène, et le moteur de notation IA2 marque les cibles principales pour la mise au point PTZ sans perdre l'image globale.
![]() Principales cibles suspectes suivies dans la vue PTZ panoramique
Principales cibles suspectes suivies dans la vue PTZ panoramique
J'utilise deux niveaux d'attention
Je sépare la scène en deux tâches. La première tâche est la détection globale. La seconde tâche est le suivi ciblé. L'IA scanne d'abord l'image entière. Ensuite, elle classe les cibles selon des règles telles que la vitesse de mouvement3, le type de cible, la zone d'entrée et la zone de risque. Après cela, le PTZ peut se verrouiller sur la cible de priorité la plus élevée tandis que la couche panoramique continue de surveiller le reste.
Je garde le top 5 sans perdre le contexte
Je ne traite pas le top 5 comme cinq cibles égales. Je les traite comme cinq éléments classés. Le système sait toujours lequel est premier, deuxième et troisième. C'est important car une caméra avec une tête PTZ ne peut pointer que dans une direction à la fois. Si j'ignore cela, je perds du temps et je manque du mouvement. Je garde donc un flux de vue d'ensemble stable et laisse la couche PTZ bouger uniquement lorsque les règles l'indiquent.
Je m'appuie sur une priorisation intelligente, pas sur un changement aveugle
Je ne veux pas que la caméra saute partout tout le temps. Cela crée un suivi faible et des preuves médiocres. J'utilise d'abord des filtres. Par exemple, je peux dire au système de donner plus de poids aux personnes, aux véhicules ou aux cibles dans une zone restreinte. Je peux également réduire le score pour les petits mouvements près du bord de l'image. Cela rend la liste du top 5 plus utile, car la caméra suit ce qui compte le plus, pas seulement ce qui bouge en premier.
| Règle de priorité | Ce qu'il fait | Pourquoi je l'utilise |
|---|---|---|
| Vitesse du mouvement | Augmente le score pour les cibles rapides | Cela aide à attraper les intrusions rapides |
| Type de cible | Préfère les personnes ou les véhicules | Cela correspond aux règles du site |
| Entrée dans la zone | Augmente les cibles dans les zones clés | Cela protège les portails et les clôtures |
| Distance du centre | Favorise les cibles proches du centre | Cela réduit le temps de déplacement PTZ |
Je garde la vue panoramique pour la sécurité et la révision
Je veux toujours que la scène entière reste visible. La vue panoramique m'aide à vérifier ce qui s'est passé avant et après le mouvement PTZ. Elle m'aide également à vérifier si une autre cible est entrée dans le champ pendant que le PTZ était occupé. C'est utile dans les cours, les routes, les fermes et les grands sites. Dans ces endroits, un seul mouvement de caméra ne devrait jamais détruire l'enregistrement complet de la scène. Je traite donc le suivi panoramique comme la couche de base et le suivi PTZ comme la couche d'action.
Comment l'IA priorise-t-elle la cible à suivre en premier en fonction des règles de sécurité personnalisées ?
Je porte beaucoup d'attention à cette partie, car de mauvaises règles de priorité peuvent faire qu'une caméra performante agisse comme une caméra faible. Je veux que l'IA suive la logique de mon site, pas seulement le mouvement générique.
L'IA priorise la première cible en utilisant un score de règle. Elle vérifie le type de cible, l'emplacement, la vitesse, la direction et la zone d'alarme, puis sélectionne le score le plus élevé comme première cible PTZ. Je peux ajuster ces règles pour les personnes, les véhicules, les clôtures, les entrées ou toute zone spécifique au site.
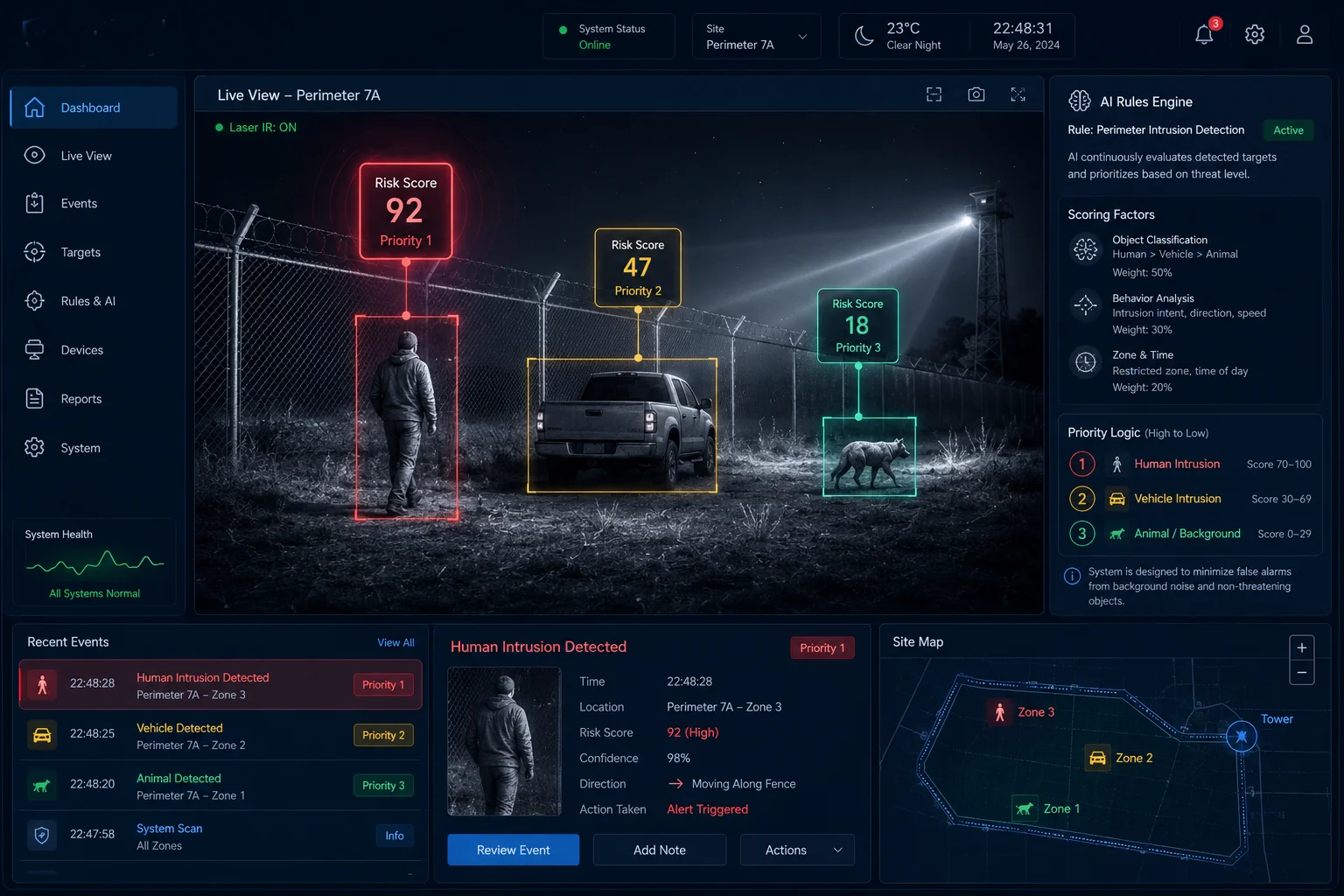 Règles de priorité des cibles IA pour le suivi PTZ
Règles de priorité des cibles IA pour le suivi PTZ
Je définis les règles avant que la caméra ne démarre
Je ne laisse jamais la caméra deviner par elle-même. Je définis d'abord les règles. Si je gère un entrepôt, je peux vouloir que les personnes près des quais de chargement soient les plus prioritaires. Si je gère une ferme solaire, je peux vouloir que le mouvement des véhicules près du périmètre soit le plus prioritaire. L'IA utilise ensuite ces règles comme score de base. Cela rend le système utile pour un travail réel, car chaque site a son propre schéma de risque.
Je note chaque cible de manière simple
J'aime une méthode de notation facile à lire. La caméra peut attribuer des points à chaque cible. Une personne dans une zone sans entrée peut obtenir un score élevé. Un véhicule se dirigeant vers une porte peut également obtenir un score élevé. Un travailleur marchant dans une zone sûre peut obtenir un score plus bas. Cela ne signifie pas que le score inférieur est ignoré. Cela signifie simplement que le PTZ accorde une première attention à la cible la plus importante.
J'évite les changements de priorité erronés
Je dois également empêcher le système de changer de cible trop rapidement. Si l'IA continue de passer d'un objet à l'autre, le PTZ perd du temps et la vidéo semble désordonnée. J'utilise donc temps de dwell4, des vérifications de confiance et des règles de zone. Le temps de dwell maintient la caméra sur une cible suffisamment longtemps pour obtenir des détails utiles. Vérifications de confiance5 s'assurent que la cible est réelle et non du bruit. Les règles de zone aident l'IA à rester concentrée sur la zone qui compte.
| Type de règle | Exemple | Résultat |
|---|---|---|
| Règle de zone | Zone de violation de clôture | Priorité plus élevée |
| Règle d'objet | Personne par rapport au mouvement de fond | Meilleur choix de cible |
| Règle de vitesse | Véhicule rapide près de la porte | Verrouillage PTZ plus rapide |
| Règle de confiance | Score de correspondance IA élevé | Moins de changements incorrects |
Je garde la logique flexible pour différents sites
Je n'utilise pas un ensemble de règles fixes pour chaque projet. Un site de ferme nécessite une configuration différente de celle d'une porte de ville ou d'un parc portuaire. Dans un cas, je peux vouloir que la caméra suive d'abord les personnes. Dans un autre cas, je peux vouloir qu'elle suive d'abord les camions. J'aime les systèmes qui me permettent de changer cela sans réécrire tout le projet. C'est là qu'une plateforme de caméra OEM/ODM solide Plateforme de caméra OEM/ODM6 m'aide, car je peux adapter le moteur de priorité au travail au lieu de forcer le travail à s'adapter à la caméra.
Le PTZ effectuera-t-il une séquence de clichés en “tir rapide” pour plusieurs cibles dans une seule zone ?
J'ai vu cette demande plusieurs fois. Les gens veulent des preuves rapides de nombreuses cibles au même endroit. Je comprends pourquoi, car une scène animée peut changer en quelques secondes.
Le PTZ peut effectuer une séquence d'instantanés en rafale7 pour plusieurs cibles dans la même zone, mais il ne le fait pas de manière aléatoire. Il utilise une file d'attente, un plan de trajectoire de mouvement et une règle de synchronisation afin que chaque cible obtienne une prise de vue claire sans gaspiller le mouvement PTZ.
 Séquence d'exécution d'instantanés PTZ en rafale
Séquence d'exécution d'instantanés PTZ en rafale
Je considère la rafale comme une vitesse contrôlée
Je ne pense pas à la rafale comme “prendre autant de photos que possible”. Je pense plutôt à “prendre les bonnes photos rapidement”. La caméra PTZ tourne, zoome, fait la mise au point, capture et se déplace vers la cible suivante dans un ordre planifié. Si les cibles sont proches les unes des autres, le système peut gérer plusieurs instantanés en peu de temps. Si elles sont éloignées, le PTZ a besoin de plus de temps de déplacement, donc la séquence ralentit.
J'utilise la profondeur de la file d'attente pour protéger la vitesse et la qualité
La file d'attente est importante car le PTZ ne peut suivre qu'une seule direction à la fois. Si la file d'attente est trop longue, la caméra peut devenir lente et moins utile. Si la file d'attente est trop courte, elle peut manquer des cibles importantes. J'aime une file d'attente de taille moyenne car elle maintient le système occupé sans le rendre instable. En pratique, une file d'attente de 8 à 16 cibles offre souvent un bon équilibre pour un usage industriel.
Je laisse la logique de trajectoire réduire les mouvements inutiles
Je ne veux pas que le PTZ tourne dans le désordre. Cela fait perdre du temps et peut faire manquer à la caméra la meilleure prise de vue. J'utilise donc une logique de trajectoire qui réduit l'angle entre les mouvements des cibles. L'idée est simple. Si deux cibles sont proches, la caméra doit les capturer l'une après l'autre. Si une cible est éloignée, le système doit décider si elle vaut toujours la peine d'être déplacée maintenant ou plus tard. C'est là qu'une file d'attente intelligente donne de meilleurs résultats qu'une simple liste.
Je garde la qualité de l'image à l'esprit lors de la capture rapide
Le tir rapide ne fonctionne que si la caméra obtient toujours des images utilisables. Cela signifie que la mise au point, le zoom et le timing de l'obturateur doivent rester stables. Un système faible peut se déplacer rapidement mais produire des images floues. Je n'accepte pas cela. Je préfère une caméra qui se déplace rapidement et qui donne toujours des preuves nettes. C'est pourquoi le zoom optique, la mise au point prédictive8, et la mécanique stable sont tous importants en même temps.
| Étape | Ce qui se passe | Pourquoi c'est important |
|---|---|---|
| 1 | Le PTZ sélectionne la cible suivante | Il suit la file d'attente |
| 2 | La caméra pivote pour se positionner | Il réduit le délai |
| 3 | Le zoom optique s'ajuste | Il capture les détails |
| 4 | La mise au point se verrouille | Il maintient l'image nette |
| 5 | Le cliché est sauvegardé | Il enregistre les preuves |
J'utilise le tir rapide surtout dans les scènes denses
Je trouve le tir rapide le plus utile aux portes, aux passages à niveau, aux entrées de cours et aux zones bondées. Ces endroits ont souvent de nombreux objets en mouvement dans un seul cadre. Un bon système PTZ peut transformer ce désordre en preuves utiles. Un système faible ne fait que créer du bruit. Je pose donc toujours une question simple : la caméra m'aide-t-elle à comprendre la scène plus rapidement, ou prend-elle simplement plus de photos ? Cette question me permet de rester honnête lorsque je conçois le flux de travail.
Puis-je voir la file d'attente des cibles et son statut de traitement en temps réel sur mon tableau de bord de gestion ?
Je veux cette fonctionnalité à chaque fois, car je n'aime pas la logique cachée de la caméra. Si je ne peux pas voir la file d'attente, je ne peux pas faire confiance au flux de travail pendant un événement en direct.
Oui, je peux voir la file d'attente des cibles et l'état de traitement en temps réel sur le tableau de bord de gestion lorsque le système est construit avec une sortie de métadonnées9. appropriée. Le tableau de bord peut afficher les cibles mises en file d'attente, la mise au point PTZ actuelle, les clichés traités, les cibles ignorées et les mises à jour de statut en direct.
 File d'attente des cibles en temps réel sur le tableau de bord de gestion
File d'attente des cibles en temps réel sur le tableau de bord de gestion
J'ai besoin d'une visibilité claire, pas seulement d'alertes
Un bon tableau de bord devrait montrer plus que des alarmes. Je veux savoir quelle cible est entrée dans la file d'attente, laquelle est active maintenant et laquelle a déjà été traitée. Je veux aussi voir pourquoi une cible a été ignorée, si cela se produit. Cela m'aide à déboguer rapidement les problèmes sur le terrain. Cela m'aide également à expliquer le comportement de la caméra à un client qui souhaite une preuve que le système a fait le bon choix.
J'aime le statut en temps réel car cela me fait gagner du temps
Lorsque le système est en direct, chaque seconde compte. Si je peux voir la file d'attente, je peux dire si le PTZ se déplace trop lentement ou si l'IA surcharge la liste. Je peux alors ajuster les règles, raccourcir la file d'attente ou modifier les poids de priorité. C'est beaucoup mieux que d'attendre un rapport d'utilisateur une fois l'événement terminé. Le statut en temps réel m'aide à résoudre le problème pendant qu'il se produit encore.
Je veux que le tableau de bord affiche des données pratiques
Je n'ai pas besoin de décoration. J'ai besoin de données utiles. Je veux voir l'ID de la cible, le type, le score, le temps d'attente, l'angle PTZ actuel, le résultat du cliché et l'état du téléchargement. Si le système stocke également l'historique des événements, c'est encore mieux. Je peux alors examiner les tendances au fil du temps et améliorer l'ensemble des règles. Ceci est utile pour les projets de sécurité avec de nombreuses caméras et de nombreux événements, car le tableau de bord devient un véritable outil de contrôle au lieu d'un simple écran visuel.
J'utilise le tableau de bord pour prendre en charge les opérations à distance
Dans bon nombre de mes projets, l'utilisateur final n'est pas à proximité du site. Le site peut être une ferme, un chantier de construction ou un périmètre éloigné. Le tableau de bord doit donc aider mon équipe à travailler de loin. Si la caméra se bloque, je dois savoir pourquoi. Si la file d'attente s'allonge trop, je dois le voir rapidement. Si le mélange de cibles passe des personnes aux véhicules, je dois voir ce changement et réagir. C'est pourquoi j'apprécie une intégration solide du tableau de bord. Cela transforme le suivi PTZ d'une boîte noire en un système que je peux gérer en toute confiance.
Conclusion
Je peux gérer de nombreuses cibles, garder les risques les plus élevés en vue et afficher la file d'attente en temps réel lorsque la logique PTZ et les règles d'IA sont bien réglées.
1. Comprendre comment les performances du System-on-Chip affectent les limites de traitement des cibles. ︎↩︎ 2. Voir comment les moteurs de scoring IA classent les cibles pour la priorisation PTZ. ︎↩︎ 3. Apprendre comment la vitesse de mouvement est utilisée dans les règles de suivi des caméras de sécurité. ︎↩︎ 4. Découvrir pourquoi le temps de dwell empêche les sauts PTZ inutiles. ︎↩︎ 5. Comprendre comment les seuils de confiance filtrent les fausses alarmes dans le suivi IA. ︎↩︎ 6. Explorer comment les plateformes de caméras personnalisables adaptent les règles de priorité aux différents sites. ︎↩︎ 7. En savoir plus sur le mode rafale ou les séquences de clichés rapides pour plusieurs cibles. ︎↩︎ 8. Comprendre comment la mise au point prédictive maintient la netteté lors des mouvements PTZ rapides. ︎↩︎ 9. En savoir plus sur les normes de métadonnées ONVIF pour l'intégration des données de caméra. ︎↩︎