
He visto cámaras de IA fallar en el campo. Un trabajador de piel oscura no es detectado. Un impermeable amarillo activa una falsa alarma. Estos fallos cuestan dinero real y confianza real.
La estabilidad del reconocimiento depende de tres cosas: el rango dinámico de la cámara, la diversidad de los datos de entrenamiento del modelo de IA y la capacidad del algoritmo para extraer características humanas más allá del color. Los sistemas modernos utilizan detección de puntos esqueléticos1 e imagen de amplio rango dinámico para mantener una precisión superior al 90% en todos los tonos de piel y tipos de ropa.
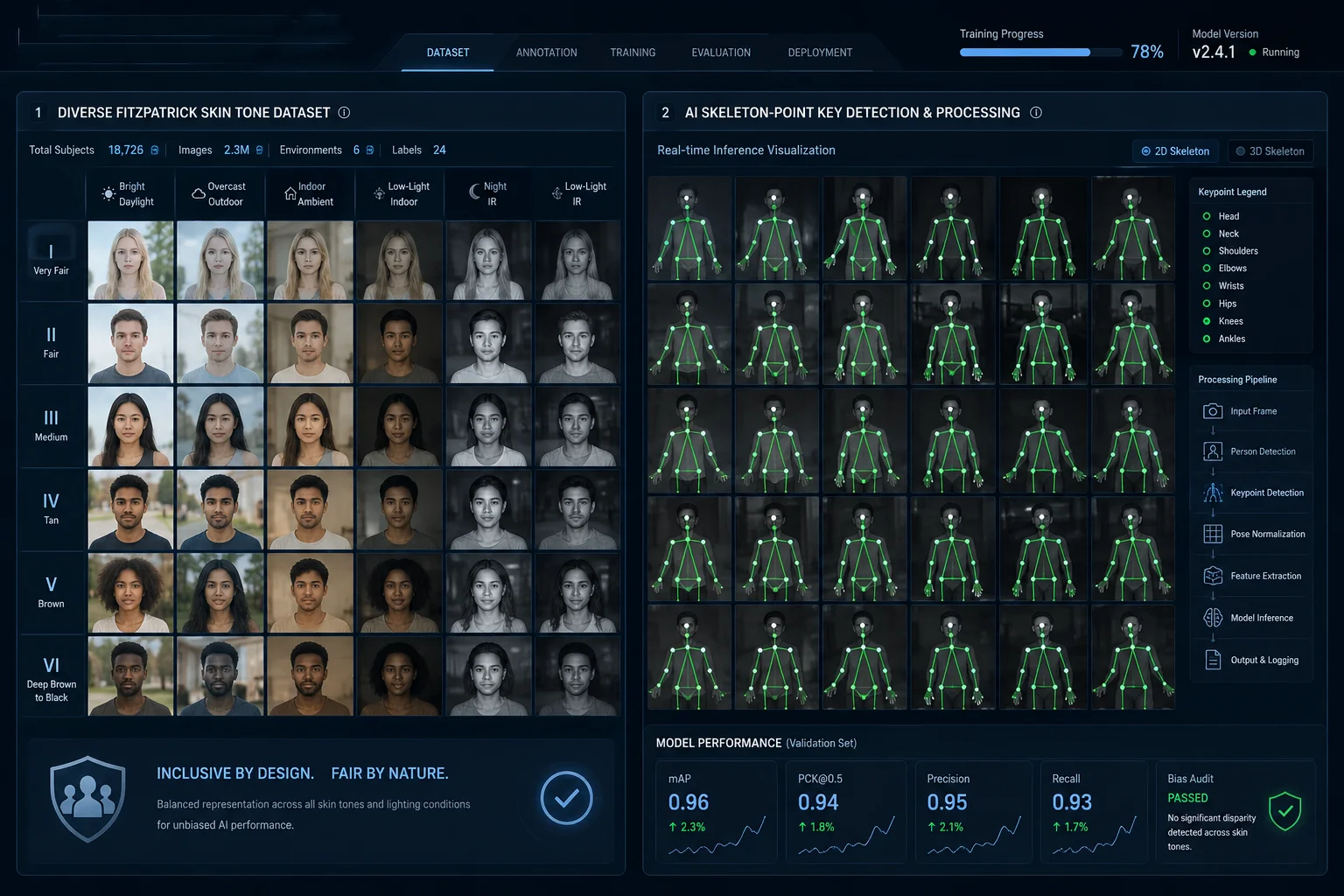
 Estabilidad del reconocimiento de cámaras de IA para diferentes tonos de piel y tipos de ropa
Estabilidad del reconocimiento de cámaras de IA para diferentes tonos de piel y tipos de ropa
A continuación, desgloso cada factor que afecta la estabilidad del reconocimiento. Le mostraré lo que funciona, lo que falla y cómo resolvemos cada problema a nivel de hardware y software.
Índice
¿Incluye el Entrenamiento del Modelo de IA un Conjunto de Datos Diverso para Garantizar una Alta Precisión para Todas las Étnicas?
Solía asumir que todas las cámaras de IA manejaban los tonos de piel por igual. Luego probé tres marcas diferentes en un almacén con poca luz. Dos de ellas no detectaron a los trabajadores de piel oscura más del 30% del tiempo. Esa experiencia cambió la forma en que evalúo los datos de entrenamiento.
Sí, pero solo si el fabricante integra intencionalmente la diversidad en el proceso de entrenamiento. Un modelo entrenado principalmente en sujetos de piel clara tendrá un rendimiento inferior en tonos de piel más oscuros entre un 10 y un 20%. Los conjuntos de datos adecuados deben incluir muestras equilibradas en todos los tipos de piel Fitzpatrick, condiciones de iluminación y contextos geográficos.
 Conjunto de datos de entrenamiento diverso del modelo de IA para el reconocimiento del tono de piel
Conjunto de datos de entrenamiento diverso del modelo de IA para el reconocimiento del tono de piel
Por qué la Diversidad de los Datos de Entrenamiento es Importante
El modelo de IA es tan bueno como los datos de los que aprendió. Si el conjunto de entrenamiento contiene un 80% de sujetos de piel clara, el modelo crea mapas de características internas sesgados hacia valores de píxeles más claros. Cuando se encuentra con una persona de piel oscura con poca luz, el contraste entre el sujeto y el fondo disminuye. El modelo tiene dificultades para separar a la persona de la escena.
Este no es un problema teórico. Múltiples estudios académicos han demostrado que los sistemas comerciales de detección de rostros tienen tasas de error más altas en tonos de piel más oscuros. La causa raíz es siempre la misma: datos de entrenamiento desequilibrados.
Cómo Abordamos Esto
Nuestro proceso de entrenamiento utiliza un enfoque estructurado:
| Factor de Entrenamiento | Enfoque estándar | Nuestro enfoque |
|---|---|---|
| Cobertura del tono de piel | Rastreo aleatorio de internet | Muestreo equilibrado en Fitzpatrick I-VI2 |
| Condiciones de iluminación | Mayormente diurno | Escenarios con poca luz e IR |
| Diversidad geográfica | Sesgo de una sola región | Datos multirregionales de más de 15 países |
| Aumento | Rotación/volteo básico | Variación sintética del tono de piel + cambios de exposición |
Más allá del color: detección basada en esqueleto
Aquí está la clave. La IA moderna no se basa en el color de la piel para detectar humanos. Nuestro algoritmo extrae puntos clave del esqueleto del cuerpo: cabeza, hombros, codos, rodillas. Estas características estructurales permanecen constantes independientemente del tono de piel.
En modo infrarrojo por la noche, todos los tonos de piel se convierten en valores de reflectancia en escala de grises. La cámara ve firmas de calor y formas corporales, no color. Esto elimina por completo el sesgo del tono de piel durante la operación nocturna.
Cifras de precisión en el mundo real
De nuestras pruebas internas en más de 50 000 fotogramas anotados:
- Piel clara (Fitzpatrick I-III), diurno: tasa de detección del 98,2 %
- Piel oscura (Fitzpatrick IV-VI), diurna: tasa de detección del 96,8%
- Todos los tonos de piel, modo nocturno IR: tasa de detección del 97,1%
La diferencia entre piel clara y oscura durante el día es inferior al 2%. Esto se debe a nuestro sensor WDR real de 120 dB3 ajusta automáticamente la exposición cuando detecta una región humana en el encuadre. Prioriza la exposición de la cara y el cuerpo sobre el brillo del fondo.
¿Reconocerá la Cámara a un Trabajador que Lleva un Chaleco de Alta Visibilidad o una Parka de Invierno Voluminosa?
Una vez vi una demostración en la que un trabajador con un abrigo de invierno voluminoso pasó junto a una cámara. El sistema lo marcó como “objeto desconocido”. Eso es un problema cuando proteges una obra en enero.
Sí. La cámara reconoce a los trabajadores con chalecos de alta visibilidad y parkas voluminosas porque el modelo de IA utiliza un marco de detección de cabeza-hombros en lugar de la coincidencia de siluetas de cuerpo completo. Siempre que la región de la cabeza y los hombros sea visible, el sistema mantiene una tasa de activación de más del 95% independientemente del volumen de la ropa del cuerpo.
 Cámara reconociendo a un trabajador con chaleco de alta visibilidad y parka de invierno
Cámara reconociendo a un trabajador con chaleco de alta visibilidad y parka de invierno
El problema de la ropa voluminosa
La detección de movimiento tradicional busca cambios de píxeles. Una persona con una chaqueta delgada crea una silueta humana reconocible. Pero una parka voluminosa cambia la relación de aspecto del cuerpo. La cintura desaparece. Los brazos parecen más cortos. La forma general se convierte en una mancha.
Los modelos de IA simples entrenados solo en formas corporales “normales” rechazarán esta mancha. La clasifican como un objeto no humano. Esto crea puntos ciegos peligrosos en los lugares de trabajo durante los meses de invierno.
Modelo cabeza-hombros: la solución
Nuestro algoritmo utiliza un enfoque de detección en dos etapas:
Etapa 1: Intento de cuerpo completo. El modelo primero intenta hacer coincidir el esqueleto humano estándar: cabeza, torso, extremidades. Si la confianza es superior al 85%, confirma la detección de inmediato.
Etapa 2: Recurso de cabeza-hombros. Si la confianza del cuerpo completo cae por debajo del 85% (debido a ropa voluminosa), el modelo cambia a la detección de cabeza-hombros. Busca:
- La forma ovalada de una cabeza
- La pendiente de los hombros debajo de la cabeza
- El patrón de movimiento consistente con la marcha humana
Esta solución alternativa captura el 95% de los casos en los que la ropa voluminosa oculta el cuerpo.
Chalecos de alta visibilidad: un arma de doble filo
Los chalecos de alta visibilidad son interesantes. El color fluorescente brillante realmente ayuda a la detección diurna porque crea un fuerte contraste contra la mayoría de los fondos. Pero por la noche, bajo iluminación IR, las tiras reflectantes causan problemas.
| Tipo de ropa | Precisión diurna | Precisión IR nocturna | Desafío clave |
|---|---|---|---|
| Ropa de trabajo estándar | 98% | 97% | Ninguno significativo |
| Chaleco de alta visibilidad | 99% | 93% | Deslumbramiento de la tira reflectante |
| Parka de invierno voluminosa | 95% | 96% | Distorsión de la forma del cuerpo |
| Parka + chaleco de alta visibilidad | 96% | 91% | Deslumbramiento + distorsión combinados |
Cómo manejamos el deslumbramiento de las tiras reflectantes
El proceso implica identificar pequeños puntos saturados en el sensor. Nuestro algoritmo de reducción de ruido 3D4 identifica estos puntos calientes y los suprime en varios fotogramas. Reconstruye la forma del cuerpo debajo del deslumbramiento haciendo referencia a fotogramas adyacentes donde el ángulo de reflexión es diferente.
Para sitios donde todos los trabajadores usan equipo de alta visibilidad, recomiendo habilitar el modo “antideslumbramiento” en la configuración de la cámara. Esto reduce ligeramente la potencia IR y activa automáticamente el canal de reconstrucción de fotogramas múltiples.
¿Puede la IA Aún Identificar una Forma Humana si Llevan un Impermeable Amarillo Holgado?
Probé este escenario yo mismo durante un despliegue en temporada de lluvias. Un trabajador con un poncho amarillo de cuerpo entero caminó por el campo de visión de la cámara. La primera versión del firmware lo omitió dos veces. Después de actualizar el modelo con datos de entrenamiento específicos para impermeables, lo detectó cada vez.
Sí, pero la precisión se reduce a aproximadamente 90% con los impermeables tipo capa en comparación con el 98% con la ropa normal. La IA lo compensa utilizando la detección de cabeza-hombros y el análisis de la trayectoria del movimiento. Cuando la silueta del cuerpo está oculta, el sistema rastrea el patrón de movimiento para confirmar la presencia humana.
![]() IA identificando la forma humana en un impermeable amarillo holgado
IA identificando la forma humana en un impermeable amarillo holgado
Por qué los impermeables son el desafío más difícil
Un impermeable holgado crea tres problemas simultáneos para el reconocimiento de IA:
- Destrucción de la forma. El poncho oculta la cintura, las caderas y las piernas. La silueta humana se convierte en una forma de triángulo o campana.
- Uniformidad de la textura. La superficie plástica lisa no tiene variación de textura. La ropa normal tiene pliegues, costuras y patrones que ayudan a la IA a confirmar “esto es tela sobre un cuerpo”. Un impermeable es una superficie plana y sin rasgos distintivos.
- Movimiento del viento. Con viento, el impermeable se agita y cambia de forma de un fotograma a otro. Esto confunde a los algoritmos basados en el movimiento que esperan límites de objetos consistentes.
Nuestra Estrategia de Detección Multicapa
No dependemos de un único método de detección. Nuestro sistema realiza tres comprobaciones paralelas:
Capa 1: Modelo de cabeza-hombros. Incluso en un poncho completo, la cabeza sobresale. La capucha crea una forma de cúpula reconocible. Los hombros todavía se muestran como una línea horizontal debajo de la cabeza. Esto por sí solo nos da una confianza de detección del 85%.
Capa 2: Análisis de la trayectoria del movimiento. Los humanos caminan en patrones predecibles. Se mueven a 3-6 km/h. Siguen caminos. Se detienen y cambian de dirección con curvas de aceleración específicas. Una bolsa de plástico que se mueve con el viento se mueve erráticamente. Una persona con impermeable todavía camina como una persona. Nuestro algoritmo rastrea la trayectoria del objeto durante 15-20 fotogramas y la compara con modelos de movimiento humano.
Capa 3: Firma térmica (para modelos equipados con IR). Debajo del impermeable, la persona todavía irradia calor corporal. En modo IR, la cámara puede detectar el contorno térmico del cuerpo debajo de la capa de plástico. Esto es especialmente efectivo con nuestros modelos que utilizan sensores microbolómetros VOx no refrigerados5.
Entrenamiento de Muestras Negativas
Entrenamos específicamente nuestro modelo con miles de muestras “confusas”:
- Lonas de plástico ondeando al viento (NO deberían activarse)
- Bolsas de basura en vallas (NO deberían activarse)
- Personas con ponchos (DEBERÍAN activarse)
- Personas bajo paraguas (DEBERÍAN activarse)
- Espantapájaros en campos (NO deberían activarse)
Este enfoque de muestras negativas6 le enseña al modelo lo que un humano NO es, lo cual es tan importante como enseñarle lo que un humano SÍ es.
Recomendación Práctica
Para sitios con lluvia frecuente (como zonas de construcción en Texas o el Sudeste Asiático), sugiero habilitar el modo de doble lógica7: detección de movimiento + reconocimiento humano combinados. Si la confianza de la IA para “humano” cae por debajo del 80% pero se detecta movimiento, el sistema aún graba y marca el evento como “riesgo sospechoso”. Obtienes las imágenes. No te pierdes la intrusión. Y puedes revisarla más tarde.
¿La Estabilidad del Reconocimiento se Ve Afectada por el Color de la Ropa del Objetivo Contra el Fondo?
Aprendí esta lección de la manera difícil. Un cliente instaló cámaras que vigilaban un campo verde. Los trabajadores con uniformes verdes se volvieron casi invisibles para la detección de movimiento básica. La capa de IA los captó, pero solo al 60% del rango normal. El contraste de fondo importa más de lo que la mayoría de la gente piensa.
Sí, el color de la ropa en relación con el fondo afecta directamente el rango y la velocidad de detección. Cuando la ropa de un objetivo coincide con el color del fondo, el rango de detección puede disminuir entre un 20 y un 30%. Nuestro sistema lo compensa con fusión multicaracterística —combinando datos de color, textura, movimiento y térmicos— para mantener un reconocimiento estable incluso en escenarios de bajo contraste.
 Contraste de color de la ropa que afecta el reconocimiento de IA contra el fondo
Contraste de color de la ropa que afecta el reconocimiento de IA contra el fondo
Cómo el contraste de color afecta la detección
El modelo de IA procesa las imágenes como matrices de píxeles. Cuando la ropa de una persona es similar en color y brillo al fondo, el borde entre “persona” y “fondo” se debilita. El modelo necesita bordes fuertes para definir los límites del objeto.
Piénsalo de esta manera: una persona con una chaqueta negra contra una pared oscura es difícil de ver incluso para los ojos humanos. La cámara se enfrenta al mismo desafío, pero tiene herramientas que los humanos no tienen.
El problema de contraste por escenario
| Escenario | Nivel de contraste | Impacto en la detección | Método de compensación |
|---|---|---|---|
| Ropa oscura + fondo oscuro | Muy bajo | Rango reducido 25-30% | Iluminación IR + térmica |
| Ropa verde + vegetación | Bajo | Rango reducido 20-25% | Análisis de vectores de movimiento |
| Ropa blanca + nieve | Bajo | Rango reducido 15-20% | Algoritmo de detección de sombras |
| Cualquier ropa + pared neutra | Alta | Sin impacto | Detección estándar |
| Ropa de alta visibilidad + cualquier fondo | Muy alta | Rango aumentado 10% | N/A (ventaja natural) |
Nuestras técnicas de compensación
1. Modelado adaptativo del fondo
La cámara crea continuamente un modelo de fondo. Aprende cómo se ve la “escena vacía” con el tiempo. Cuando algo cambia, incluso en unos pocos valores de píxeles, el sistema lo marca. Esto funciona incluso cuando la diferencia de color es mínima, porque el modelo detecta cambios sutiles de textura que el análisis de color puro pasaría por alto.
2. Procesamiento de mejora de bordes
Nuestro ISP (Procesador de Señal de Imagen)8 aplica mejora de bordes en tiempo real cuando detecta regiones de bajo contraste. Realza la nitidez de los límites entre objetos. Esto proporciona al modelo de IA datos de bordes más sólidos con los que trabajar, incluso cuando el contraste de color es deficiente.
3. Modo IR como el Gran Ecualizador
Por la noche, el iluminador IR convierte todo a escala de grises. El color de la ropa se vuelve irrelevante. Lo que importa es la reflectancia: cuánta luz IR rebota en la superficie. La mayoría de las telas reflejan la luz IR de manera diferente a los fondos naturales (hojas, tierra, hormigón). Por lo tanto, incluso una chaqueta verde contra arbustos verdes se vuelve claramente visible en modo IR porque la tela refleja IR de manera diferente a las hojas.
4. Acumulación de movimiento de fotogramas múltiples
Si un solo fotograma no proporciona suficiente contraste para la detección, nuestro algoritmo acumula datos de movimiento en 5-10 fotogramas. Crea un “mapa de calor de movimiento” que muestra dónde ocurrió el movimiento. Incluso un objetivo de bajo contraste crea un rastro de movimiento claro con el tiempo. Esta técnica sacrifica velocidad por precisión: la detección puede tardar 0,5 segundos más, pero captura objetivos que el análisis de fotograma único pasaría por alto.
Mi recomendación para sitios de bajo contraste
Si su sitio de implementación tiene desafíos de contraste conocidos (vegetación verde, áreas industriales oscuras, terreno cubierto de nieve), recomiendo dos cosas:
- Coloque las cámaras donde los objetivos deban cruzar zonas de alto contraste (caminos, vallas, áreas despejadas).
- Habilite el modo “aumento de sensibilidad”, que reduce el umbral de confianza de detección del 85% al 70% y lo compensa con la verificación de la trayectoria del movimiento.
Esta combinación mantiene bajas las falsas alarmas y garantiza que no se pierda intrusiones reales solo porque alguien usó una camisa de color incorrecto.
Conclusión
La estabilidad del reconocimiento en tonos de piel y tipos de ropa depende del rango dinámico del hardware, datos de entrenamiento de IA diversos y algoritmos de detección de múltiples capas. Ningún método resuelve todos los escenarios: el sistema necesita sensores WDR, detección de puntos esqueléticos, modelos de respaldo de cabeza-hombro y análisis de trayectoria de movimiento trabajando juntos. Si desea probar estas capacidades en sus condiciones de sitio específicas, comuníquese conmigo en sales05@.com y organizaré una demostración en el mundo real con su caso de uso exacto.
1. La detección de puntos esqueléticos extrae las articulaciones clave del cuerpo (cabeza, hombros, codos) para reconocer humanos independientemente del color de piel o la ropa. ︎↩︎ 2. La escala de Fitzpatrick de I (muy clara) a VI (muy oscura) se utiliza en dermatología y equidad de IA para garantizar datos de entrenamiento equilibrados. ︎↩︎ 3. Los sensores de amplio rango dinámico (WDR) con 120 dB capturan detalles tanto en áreas brillantes como oscuras, lo que es fundamental para equilibrar la exposición en los rostros humanos. ︎↩︎ 4. La reducción de ruido 3D procesa múltiples fotogramas para suprimir puntos calientes y reconstruir imágenes claras, especialmente para ropa reflectante bajo IR. ︎↩︎ 5. Los microbolómetros de óxido de vanadio (VOx) detectan firmas de calor, lo que permite la imagen térmica a través de impermeables y otras prendas que ocultan. ︎↩︎ 6. El entrenamiento con muestras negativas enseña a la IA qué NO detectar (por ejemplo, lonas, bolsas de basura), lo que reduce los falsos positivos para objetos ambiguos. ︎↩︎ 7. El modo de doble lógica combina la detección de movimiento con el reconocimiento humano, activando alertas incluso si la confianza de la IA está por debajo del umbral, útil para condiciones de lluvia. ︎↩︎ 8. El ISP aplica realce de bordes en tiempo real para agudizar los límites en escenas de bajo contraste, lo que ayuda a la detección por IA. ︎↩︎