
He visto objetivos encogerse hasta convertirse en puntos diminutos en la pantalla mientras se alejan de una cámara con zoom fijo. Esas grabaciones son inútiles para la identificación. Este problema cuesta dinero real cuando se necesita evidencia.
Sí, la función de Zoom Automático mantiene el objetivo a un tamaño constante en el encuadre. Utiliza un bucle de retroalimentación PID1 para calcular la relación de píxeles del objetivo en tiempo real, y luego acciona el motor de zoom para compensar los cambios de distancia. El resultado es una imagen estable e identificable, ya sea que el sujeto esté a 10 metros o a 500 metros de distancia.
 consistencia del tamaño del objetivo de la cámara PTZ con zoom automático
consistencia del tamaño del objetivo de la cámara PTZ con zoom automático
A continuación, detallo exactamente cómo funciona esto en diferentes escenarios. Cubro el comportamiento del zoom hacia afuera cuando alguien se acerca, el desafío del detalle 40X a larga distancia, la configuración de la Relación de Relleno del Objetivo y la fluidez de la respuesta del zoom durante el seguimiento. Cada sección profundiza en la ingeniería para que pueda tomar decisiones informadas para su próxima implementación.
Índice
¿Se alejará automáticamente el objetivo de la lente a medida que una persona se acerque para mantener su cuerpo completo a la vista?
He visto a instaladores entrar en pánico cuando una persona rastreada camina hacia la cámara y de repente llena todo el encuadre. El sistema pierde el objetivo porque ya no puede ver los bordes. Este es un problema resuelto con una lógica de zoom automático adecuada.
Sí, la lente se aleja automáticamente cuando una persona se acerca. El algoritmo de IA detecta que la altura de píxeles del objetivo supera el umbral preestablecido y envía un comando de zoom hacia afuera al motor. Esto mantiene el cuerpo completo visible en el encuadre en todo momento.
![]() zoom automático PTZ objetivo que se acerca vista de cuerpo completo
zoom automático PTZ objetivo que se acerca vista de cuerpo completo
Cómo funciona la lógica de zoom hacia afuera
La cámara ejecuta un bucle continuo. En cada fotograma, mide cuántos píxeles ocupa el objetivo. Cuando alguien camina hacia la cámara, su tamaño en píxeles aumenta. El algoritmo compara este tamaño con un rango preestablecido, generalmente del 10% al 25% de la altura del encuadre.
Una vez que el objetivo excede el límite superior, el sistema activa un comando de zoom hacia afuera. El motor de zoom retrocede hasta que el objetivo vuelve a estar dentro del rango aceptable. Esto ocurre en menos de 500 ms, por lo que la transición se siente natural en su monitor.
El concepto de zona muerta
El sistema no reacciona a cada pequeño cambio. Si lo hiciera, la lente estaría constantemente yendo y viniendo. Los ingenieros llaman a esto “vibración del zoom”. Para evitarlo, el firmware incluye una zona muerta. El motor solo se mueve cuando el tamaño del objetivo se desvía más del 5% del valor ideal.
Esta zona muerta cumple dos propósitos. Primero, mantiene el video fluido para el operador. Segundo, protege el motor de zoom del desgaste excesivo. En una implementación 24/7, la longevidad del motor es importante.
Tabla de comportamiento en el mundo real
| Escenario | Distancia objetivo | Acción de zoom | Resultado |
|---|---|---|---|
| Persona caminando hacia la cámara | 50m → 10m | Alejar (Amplio) | El cuerpo completo permanece visible |
| Persona quieta | Constante | Sin movimiento | El motor descansa, sin desgaste |
| Persona corriendo hacia la cámara | 100m → 20m rápido | Alejar rápido | El algoritmo predice la velocidad para mantenerse adelante |
Por qué esto es importante para los integradores de sistemas
Si despliega cámaras en puntos de entrada, puertas o pasillos, las personas se acercarán directamente a la cámara. Sin alejar automáticamente, obtendrá unos segundos de metraje útil seguido de un primer plano borroso del pecho de alguien. El rastreador de IA pierde el cuadro delimitador y el sistema falla.
Con una lógica de alejamiento adecuada, la cámara mantiene una toma utilizable desde el momento en que adquiere el objetivo hasta que la persona pasa por debajo. Esto le da a su VMS suficientes fotogramas para el reconocimiento facial, el análisis de la marcha o la simple identificación visual.
¿Cómo mantiene el “Zoom Inteligente” un detalle claro de 40X de un objetivo que se aleja a 500 metros?
He probado muchas cámaras que afirman Zoom óptico 40X2. La mayoría de ellas pierden completamente el enfoque al acercarse mientras rastrean un objetivo en movimiento. La imagen se convierte en un desastre borroso durante 2-3 segundos. A 500 metros, esos segundos significan que pierde el objetivo por completo.
El zoom inteligente a 40X mantiene la claridad a través de algoritmos de enfoque predictivo que sincronizan el motor de enfoque con el motor de zoom en tiempo real. A medida que el objetivo se aleja, el sistema se acerca y ajusta simultáneamente el enfoque basándose en la distancia calculada, no en una búsqueda reactiva. Esto mantiene la imagen nítida durante toda la transición del zoom.
 Zoom inteligente óptico 40X, claridad de objetivo a 500m
Zoom inteligente óptico 40X, claridad de objetivo a 500m
El desafío principal: Sincronización de zoom y enfoque
A baja magnificación, los errores de enfoque son tolerables. La profundidad de campo es lo suficientemente amplia como para que los pequeños errores no se noten. A 40X, la profundidad de campo se reduce drásticamente. Un error de enfoque de solo unos pocos milímetros en el conjunto de la lente produce una imagen completamente inutilizable.
Las cámaras tradicionales utilizan un enfoque reactivo. Primero hacen zoom y luego buscan el enfoque. Esto crea un período de desenfoque visible. Nuestro firmware utiliza un método diferente. Almacena una curva zoom-enfoque3 en memoria. Esta curva mapea cada posición de zoom a su posición de enfoque correcta para una distancia dada. Cuando el motor de zoom se mueve, el motor de enfoque se mueve simultáneamente a lo largo de esta trayectoria precalculada.
Estimación predictiva de distancia
El rastreador de IA no solo sabe dónde está el objetivo en el encuadre. También estima la velocidad a la que el objetivo se aleja. Utilizando los cambios de tamaño entre fotogramas, el algoritmo calcula la tasa de aumento de la distancia. Luego predice dónde estará el objetivo 200 ms en el futuro y preposiciona el motor de enfoque en consecuencia.
Esta predicción es crítica a 500 metros. A esa distancia, incluso la velocidad de caminar (5 km/h) cambia la posición de enfoque requerida notablemente entre fotogramas. Sin predicción, el sistema siempre va un paso por detrás.
Rendimiento a diferentes distancias
| Gama | Nivel de zoom utilizado | Método de enfoque | Calidad de imagen |
|---|---|---|---|
| 0-100m | 1X-10X | Autofoco estándar | Excelente |
| 100-300m | 10X-25X | Sincronización basada en curva | Muy buena |
| 300-500m | 25X-40X | Predicción + sincronización de curva | Bueno (requiere montura estable) |
| 500m+ | 40X máx. | Ajuste fino predictivo + manual | Aceptable con poco viento |
Coordinación IR láser por la noche
A 500 metros en la oscuridad, necesita iluminación activa. El módulo IR láser4 debe ampliar su ángulo de haz para que coincida con el campo de visión de la cámara. Cuando la cámara se acerca a 40X, el láser estrecha su haz para concentrar toda su potencia en el área pequeña que la cámara ve. Esta coordinación se realiza automáticamente a través del mismo bus de control.
Si el ángulo del láser no coincide con el zoom de la cámara, se produce uno de dos problemas. O bien el láser es demasiado ancho y el objetivo está débilmente iluminado. O bien el láser es demasiado estrecho y el objetivo se sale de la zona iluminada. Ambas situaciones provocan fallos en el seguimiento.
Vibración y efectos atmosféricos
A 40X y 500 metros, dos factores externos degradan la calidad de la imagen. En primer lugar, cualquier vibración en la estructura de montaje se amplifica 40 veces. Un poste que se balancea 0,1 grados mueve la imagen varios metros a esa distancia. En segundo lugar, la distorsión térmica atmosférica distorsiona la trayectoria de la luz.
Las buenas instalaciones utilizan soportes de pared rígidos o postes de alta resistencia con amortiguadores de vibraciones. El firmware de la cámara también incluye estabilización digital5 que compensa los pequeños movimientos. Pero la física establece límites estrictos aquí. Ningún algoritmo puede corregir la distorsión atmosférica severa en un día caluroso.
¿Puedo establecer una “Relación de Relleno del Objetivo” (por ejemplo, 30% de la pantalla) para el algoritmo de Zoom Automático?
He trabajado con clientes que necesitan diferentes comportamientos de zoom para diferentes sitios. Un casino quiere primeros planos de rostros. Un sitio de construcción quiere ver a la persona completa y su entorno. Una configuración fija no funciona para todos.
Sí, puede establecer una Relación de Relleno de Objetivo a través de la interfaz web o la API de la cámara. Este parámetro indica al algoritmo de zoom automático qué porcentaje del fotograma debe ocupar el objetivo. Los ajustes comunes varían del 10% para vistas ricas en contexto al 50% para primeros planos centrados en la identificación.
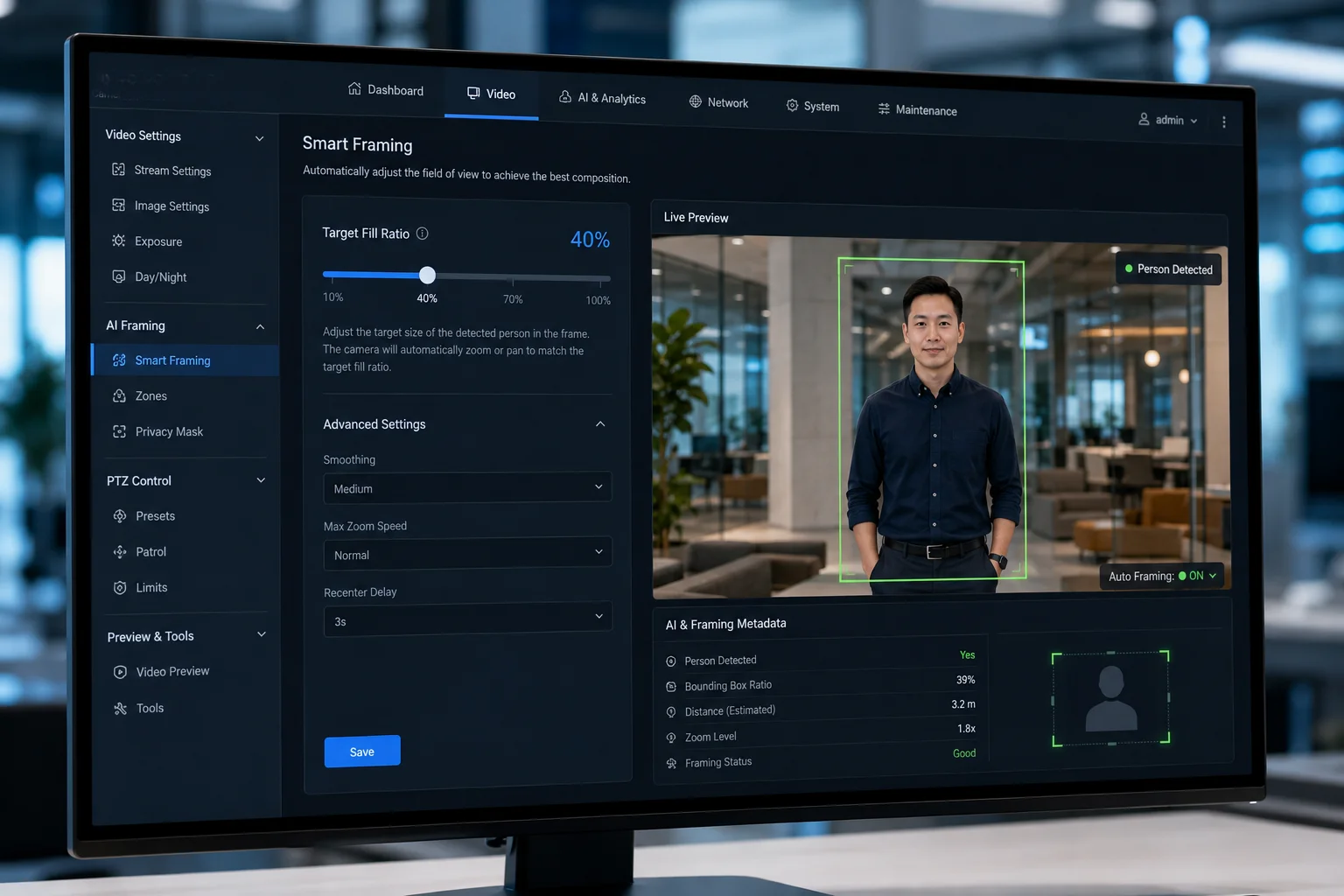 relación de relleno de objetivo ajuste de zoom automático interfaz de cámara PTZ
relación de relleno de objetivo ajuste de zoom automático interfaz de cámara PTZ
Comprensión de los modos de relación de relleno
La relación de relleno es el parámetro más importante en la configuración del zoom automático. Determina el equilibrio entre detalle y contexto. Una relación más alta significa más píxeles en el objetivo, lo que ayuda a los algoritmos de reconocimiento de IA. Una relación más baja significa más fondo visible, lo que ayuda a los operadores a comprender la escena.
La mayoría de las cámaras PTZ profesionales ofrecen esto como un control deslizante o una entrada numérica en el panel de configuración. Algunos sistemas lo etiquetan de manera diferente. Puede ver “Tamaño del objetivo”, “Agresividad del zoom” o “Nivel de detalle”. Todos controlan lo mismo.
Comparación de modos
| Nombre del modo | Ratio de relleno | Lo mejor para | Compromiso |
|---|---|---|---|
| Modo Detalle | 40%-50% | Reconocimiento facial, matrículas | El objetivo puede salir del encuadre si se mueve rápido |
| Modo Equilibrado | 20%-30% | Seguridad general, captura de pruebas | Buen equilibrio entre detalle y contexto |
| Modo Contexto | 10%-15% | Monitorización de áreas amplias, seguimiento de multitudes | Menos detalle por persona |
Cómo elegir la configuración adecuada
Piense en lo que sucede después de que la cámara capture las imágenes. Si su cliente necesita identificar rostros para control de acceso o revisión forense, establezca una relación más alta. La IA necesita al menos 80 píxeles entre los ojos para una coincidencia facial fiable. Con una relación de relleno del 30% en una cámara de 1080p, el rostro de una persona obtiene aproximadamente entre 60 y 80 píxeles de ancho. Eso está en el límite. Aumente al 40-50% si la identificación facial es la prioridad.
Si a su cliente le importa más entender lo que sucedió en un incidente, mantenga la relación en un 15-20%. Esto muestra el objetivo más su entorno. Puede ver si recogió algo, interactuó con otra persona o entró en un vehículo. El contexto cuenta la historia.
Cambio dinámico de la relación de relleno
Algunas implementaciones avanzadas utilizan reglas para cambiar automáticamente las relaciones de relleno. Por ejemplo, durante el modo de patrulla normal, la cámara utiliza una relación de relleno del 15% para una cobertura amplia. Cuando la IA detecta un evento de alarma como una intrusión perimetral, cambia al 40% para capturar el máximo detalle del intruso.
Este cambio se realiza a través del sistema de eventos y acciones de la cámara. Lo configura como: “Cuando se activa la alarma, establezca la relación de relleno al 40% y active el seguimiento automático”. Después de que finaliza el evento, vuelve a la configuración de patrulla. Esto le brinda lo mejor de ambos mundos sin intervención manual.
Integración de API para flujos de trabajo personalizados
Para los integradores de sistemas que crean soluciones VMS personalizadas, la relación de relleno es accesible a través de ONVIF6 o la API propietaria de la cámara. Puede cambiarla mediante programación basándose en entradas externas. La hora del día, la zona de alarma, la clasificación del objetivo (persona frente a vehículo) o el comando del operador pueden activar diferentes relaciones de relleno.
Esta flexibilidad es importante cuando se implementan cientos de cámaras en un proyecto. No querrá configurar cada una manualmente a través de la interfaz web. Un script que envía el perfil correcto a cada cámara según su ubicación ahorra horas de tiempo de configuración.
¿Es la respuesta del zoom lo suficientemente fluida como para evitar el desenfoque de movimiento durante el proceso de seguimiento?
He revisado imágenes de cámaras PTZ baratas donde cada ajuste de zoom crea un movimiento brusco visible. La imagen se desenfoca por un momento, el codificador tiene problemas y la grabación muestra artefactos. Esto no es aceptable para video de grado probatorio.
Sí, la respuesta del zoom es lo suficientemente suave como para evitar el desenfoque de movimiento. El motor utiliza un control de velocidad variable que acelera y desacelera gradualmente en lugar de saltar entre posiciones. Combinado con la estabilización electrónica de imagen y un bloqueo de velocidad de obturación mínima, el sistema produce fotogramas limpios incluso durante las transiciones activas de zoom.
 respuesta de zoom suave seguimiento PTZ sin desenfoque de movimiento
respuesta de zoom suave seguimiento PTZ sin desenfoque de movimiento
Por qué el zoom causa desenfoque en primer lugar
El desenfoque de movimiento durante el zoom proviene de dos fuentes. Primero, el movimiento físico de los elementos de la lente cambia la trayectoria óptica mientras el sensor está exponiendo un fotograma. Si el motor de zoom se mueve demasiado rápido en relación con la velocidad de obturación, la imagen se desenfoca radialmente desde el centro hacia afuera. Segundo, la vibración mecánica del propio motor puede sacudir todo el conjunto de la lente.
Los motores de zoom de grado profesional resuelven ambos problemas. Utilizan motores de CC sin escobillas7 con control de micro-pasos. En lugar de saltar de una posición de zoom a otra, el motor se desliza suavemente por cada posición intermedia. La curva de aceleración sigue un perfil trapezoidal o de curva S, lo que elimina los tirones repentinos.
Relación entre la velocidad de obturación y la velocidad de zoom
El firmware de la cámara coordina la velocidad de obturación con la actividad de zoom. Durante una transición de zoom, el sistema puede aumentar temporalmente la velocidad de obturación para congelar cualquier movimiento residual. En un día brillante, esto es fácil. La cámara tiene mucha luz para trabajar. Por la noche, es más difícil porque las velocidades de obturación más rápidas significan imágenes más oscuras.
Aquí es donde ayuda el módulo IR láser. Al proporcionar iluminación activa, le da al sensor suficiente luz para mantener una velocidad de obturación rápida incluso en total oscuridad. El resultado son fotogramas nítidos durante las transiciones de zoom, independientemente de las condiciones de iluminación ambiental.
La consideración de la transmisión 4G
Cuando transmite a través de 4G LTE, el codificador de video comprime cada fotograma. Los cambios rápidos de zoom crean fotogramas de alta complejidad que son más difíciles de comprimir de manera eficiente. El bitrate se dispara y, en una conexión con ancho de banda limitado, puede ver artefactos de compresión que parecen desenfoque, pero en realidad son problemas de codificación.
Para manejar esto, el firmware limita la velocidad de zoom cuando detecta una conexión con ancho de banda restringido. Prioriza la calidad de imagen sobre la capacidad de respuesta del zoom. El zoom aún alcanza su posición objetivo, pero tarda un poco más en llegar allí. Para la mayoría de los escenarios de seguimiento, esta diferencia de 200-300 ms es invisible para el operador.
Configuraciones de velocidad de zoom para diferentes redes
La configuración inteligente adapta el comportamiento del zoom a las condiciones de su red:
- Fibra/Ethernet (ancho de banda ilimitado): Velocidad de zoom máxima habilitada. El codificador puede manejar la complejidad.
- 4G LTE (10-30 Mbps): Velocidad de zoom media. Suficientemente suave para el seguimiento, lo suficientemente gentil para el codificador.
- 4G en áreas de señal débil (2-5 Mbps): Velocidad de zoom lenta. Prioriza la claridad del cuadro sobre la agresividad del seguimiento.
Longevidad del motor y funcionamiento suave
Un motor de zoom en una cámara de seguimiento 24/7 podría ejecutar miles de ciclos de zoom por día. Si cada ciclo implica movimientos bruscos de arranque y parada, el motor se desgasta en cuestión de meses. Los perfiles de aceleración suave extienden significativamente la vida útil del motor.
Nuestras cámaras utilizan un control de motor de bucle cerrado8 sistema. Un codificador de posición en el motor de zoom informa su posición exacta al controlador. Este bucle de retroalimentación asegura que el motor nunca sobrepase su posición objetivo, lo que causaría un rebote visible en la imagen. El motor llega a su destino limpiamente, cada vez.
Esto importa para su costo total de propiedad. Una cámara que necesita reemplazo del motor después de un año cuesta más en visitas técnicas y tiempo de inactividad que una cámara que funciona de manera confiable durante cinco años. El diseño de zoom suave no se trata solo de la calidad de imagen. Se trata de reducir su carga de mantenimiento en implementaciones remotas donde enviar un técnico cuesta cientos de dólares por visita.
Conclusión
Auto-Zoom mantiene su objetivo a un tamaño constante combinando medición de IA en tiempo real, enfoque predictivo, relaciones de relleno configurables y control de motor suave. Convierte el hardware PTZ en bruto en un sistema de seguimiento inteligente que ofrece imágenes utilizables a cualquier distancia.
1. Explica cómo los controladores PID mantienen una salida estable ajustando los términos proporcional, integral y derivativo. ︎↩︎ 2. Explica la diferencia entre el zoom óptico y el digital, y por qué el zoom óptico preserva la calidad de imagen. ︎↩︎ 3. Explica cómo las posiciones de zoom a foco pre-mapeadas permiten el movimiento sincronizado de la lente. ︎↩︎ 4. Describe cómo el IR láser proporciona iluminación de largo alcance sincronizada con el zoom de la cámara. ︎↩︎ 5. Explica cómo la estabilización digital (electrónica) compensa los pequeños movimientos de la cámara. ︎↩︎ 6. Explica el estándar ONVIF para la interoperabilidad de cámaras de seguridad basadas en IP. ︎↩︎ 7. Explica las ventajas de los motores de CC sin escobillas en aplicaciones de movimiento de precisión. ︎↩︎ 8. Explica cómo la retroalimentación de los sensores de posición mejora la precisión del motor y reduce el sobrepaso. ︎↩︎