
Ich habe eine perfekt stabile 4G-Solar-PTZ-Kamera beobachtet, die mitten im Stream neu gestartet ist, weil jemand zu schnell auf den 40X-Zoom-Button gedrückt hat. Dieser einzige Moment des Spannungseinbruchs kostete meinen Kunden eine Anfahrt zu einem abgelegenen Standort.
Das System unterdrückt Spannungsabfälle durch eine Kombination aus Massenkondensatoren5 für sofortige Energiepufferung, S-Kurven-Motor-Soft-Start-Algorithmen, die den Stromverbrauch über die Zeit verteilen, und dedizierten Buck-Boost-Reglern, die empfindliche Module wie das 4G-Modem und den SoC von transienten Spannungsabfällen isolieren, die durch PTZ-Motor-Spitzen verursacht werden.
 PTZ-Kamera-Spannungsabfallunterdrückung während der Zoom-Motorbewegung
PTZ-Kamera-Spannungsabfallunterdrückung während der Zoom-Motorbewegung
Unten zerlege ich jede Ebene dieses Schutzsystems. Ich werde erklären, wie die PMIC Ihr Modem am Leben erhält, warum gleichzeitiges Schwenken-Neigen-Zoomen Ihren Stream nicht zum Absturz bringt, wie wir Fehlabschaltungen verhindern und warum die Isolierung von PCB-Stromschienen für die 4K-Bildqualität wichtig ist.
Inhaltsübersicht
Stabilisiert die Power Management IC (PMIC) die Spannung für das 4G-Modem während PTZ-Spitzen?
Ich habe gesehen, wie 4G-Modems ihre LTE-Verbindung verloren haben, weil der Zoom-Motor gerade genug Spannung für gerade lange genug gestohlen hat. Es passiert in Millisekunden, und das Modem behandelt es wie einen Stromausfall.
Ja. Die PMIC verwendet einen hocheffizienten Buck-Boost-Wandler1 zur Aufrechterhaltung einer stabilen 3,3-V-Schiene für das 4G-Modem, auch wenn die Hauptbatteriespannung während des Anlaufens des PTZ-Motors einbricht. Diese dedizierte Regelungsstufe fungiert als Puffer zwischen der lauten Motorlast und dem empfindlichen Mobilfunkmodul.
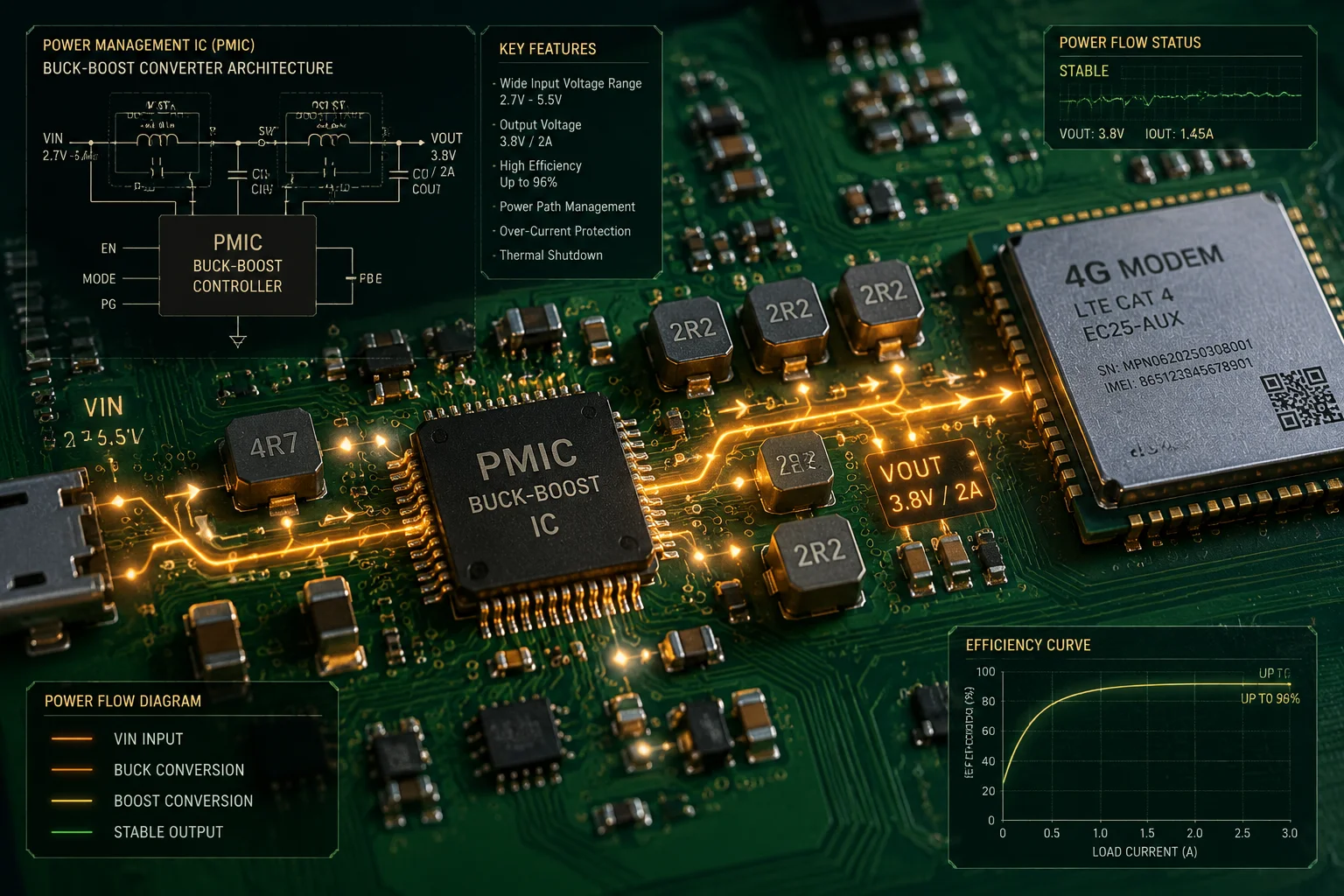 PMIC stabilisiert die Spannung für das 4G-Modem während des Spitzenstroms des PTZ-Motors
PMIC stabilisiert die Spannung für das 4G-Modem während des Spitzenstroms des PTZ-Motors
Wie die PMIC in diesem Kontext tatsächlich funktioniert
A Power Management IC (PMIC)2 ist nicht nur ein einzelner Spannungsregler. In unserem PTZ-Kameradesign ist es ein Chip mit mehreren Ausgängen, der die Batterieversorgung (typischerweise 12V) aufnimmt und mehrere unabhängige, geregelte Ausgänge erzeugt. Jeder Ausgang versorgt ein anderes Subsystem.
Das 4G-Modem benötigt eine saubere, stabile 3,3-V-Stromversorgung. Der SoC benötigt 1,2-V- und 1,8-V-Schienen. Der Motortreiber benötigt die vollen 12 V. Die PMIC verwaltet all dies aus einer einzigen Eingangsquelle.
Warum Buck-Boost-Topologie wichtig ist
Ein einfacher Buck-Konverter (Abwärtswandler) versagt, wenn die Eingangsspannung unter die Ausgangsspannung fällt. Während eines starken Zoomvorgangs kann die Batteriespannung kurzzeitig von 12V auf 10V oder sogar darunter fallen. Ein Buck-Boost-Konverter arbeitet in beide Richtungen. Er kann die Spannung herunterregeln, wenn die Batterie voll ist, und sie hochregeln, wenn die Batterie schwächelt. Das bedeutet, dass die 3,3V-Ausgangsspannung bei 3,3V bleibt, unabhängig davon, was der Motor mit der Hauptleitung macht.
Die Entkopplungsstrategie
Zwischen dem PMIC-Ausgang und dem 4G-Modem-Eingang platzieren wir zusätzliche Entkopplungskondensatoren. Dies sind kleine Keramikkondensatoren (typischerweise 10µF bis 100µF), die physisch nahe an den Strompins des Modems platziert sind. Sie fungieren als letzter Filter und fangen hochfrequente Störungen auf, die den PMIC passieren.
| Komponente | Rolle | Warum es wichtig ist |
|---|---|---|
| Buck-Boost-PMIC | Hält die Ausgangsspannung über einen weiten Eingangsspannungsbereich stabil | Verhindert Modem-Brownouts während Motor-Spitzenlasten |
| Keramische Entkopplungskondensatoren | Filtert hochfrequente Welligkeit am Modem-Eingang | Stoppt EMI vom Motor-PWM, die das Modem erreicht |
| Ferritkern | Blockiert leitungsgebundene Störungen auf der Stromleitung | Isoliert Motor-Schaltgeräusche vom Modem-Netz |
| UVLO-Schaltung | Schaltet bei Unterschreiten des sicheren Schwellenwerts ordnungsgemäß ab | Verhindert Datenbeschädigung durch instabile Stromversorgung |
Validierung in der Praxis
In unseren Tests simulieren wir Worst-Case-Szenarien. Wir befehlen einen Vollgeschwindigkeits-Zoom um das 40-fache, während die Batterie zu 30% geladen ist und das 4G-Modem mitten im Upload ist. Wir überwachen die Stromleitung des Modems mit einem Oszilloskop. Die zulässige Welligkeit beträgt weniger als 50mV Spitze-Spitze. Wenn dieser Wert überschritten wird, kann das Modem Pakete verlieren oder die Registrierung mit dem Sendemast verlieren.
David, für Ihre Einsätze in Nordamerika bedeutet dies, dass Ihre Kamera weiter streamt, auch wenn ein Sicherheitsoperator schnell in ein Nummernschild hineinzoomt. Das Modem nimmt das Spannungschaos auf der Motorseite der Platine nie wahr.
Flackert oder startet mein Videostream neu, wenn ich gleichzeitig den Zoom und die Neigung bewege?
Ein Kunde rief mich frustriert an, weil jedes Mal, wenn sein Bediener gleichzeitig schwenkte und zoomte, die Live-Übertragung für zwei Sekunden einfrierte. Er dachte, die Kamera sei kaputt. Das war sie nicht. Das Stromversorgungssystem war einfach schlecht konzipiert.
Nein. Unsere Firmware verwendet eine Phasenverschränkung4 Strategie, die Motorstarts um 20-50 Millisekunden versetzt und so gleichzeitige Spitzenstromaufnahmen verhindert. In Kombination mit der Pufferung durch Kondensatoren behalten der Videocodec und das 4G-Modem auch bei aggressiven Mehrachsen-PTZ-Befehlen eine unterbrechungsfreie Stromversorgung bei.
 Videostream-Stabilität bei gleichzeitiger Schwenk-, Neige- und Zoom-Bewegung
Videostream-Stabilität bei gleichzeitiger Schwenk-, Neige- und Zoom-Bewegung
Das “Doppelspitzen”-Problem verstehen
Jede PTZ-Achse hat ihren eigenen Motor. Der Schwenkmotor, der Neigemotor und der Zoommotor können alle gleichzeitig Befehle empfangen. Wenn alle drei im exakt selben Moment starten, addieren sich ihre Anlaufströme. Ein einzelner Motor kann beim Start 2A ziehen. Drei gleichzeitig startende Motoren ziehen 6A. Bei einem Solarakkusystem, das für 8A Dauerstrom ausgelegt ist, drückt diese 6A-Spitze zusätzlich zum 2A-Grundstrom (SoC + Modem + Sensor) das System an seine Grenzen.
Wie Phasenverschränkung dieses Problem löst
Die Firmware startet niemals alle Motoren in derselben Millisekunde. Wenn ein “Zu Voreinstellung wechseln”-Befehl eintrifft, der Schwenk-, Neige- und Zoom-Bewegung erfordert, reiht das System diese auf:
- T = 0ms: Schwenkmotor beginnt sanften Hochlauf
- T = 30ms: Neigemotor beginnt sanften Hochlauf
- T = 60ms: Zoommotor beginnt sanften Hochlauf
Bis der Zoommotor Strom zieht, hat der Schwenkmotor seine Anlaufspitzenphase bereits überschritten und ist in den stabilen Betriebsstrom übergegangen. Die Spitzen überschneiden sich nie.
Das S-Kurven-Beschleunigungsprofil
Selbst innerhalb des Motorstarts springt der Strom nicht sofort an. Die Firmware verwendet ein S-Kurven-Beschleunigungsprofil3. Stellen Sie es sich wie ein Auto vor, das sanft aus dem Stand beschleunigt, anstatt das Gaspedal voll durchzutreten. Das PWM-Tastverhältnis steigt gemäß einer Sigmoidfunktion an. Dies verteilt die Stromaufnahme über 50-100 Millisekunden, anstatt die Spitze in weniger als 5 Millisekunden zu erreichen.
Was mit der Videopipeline passiert
Der Videocodec (im SoC) hat seine eigene dedizierte Low-Dropout (LDO)-Regler8. Selbst wenn die Haupt-5V-Schiene leicht abfällt, absorbiert der LDO diese Schwankung und liefert eine saubere 1,8V an den Encoder-Kern. Der 4K-Sensor sitzt ebenfalls hinter einem eigenen Regler. Die Bildpipeline ist also doppelt gegen Motorrauschen isoliert.
Das Ergebnis: keine Frame-Drops, keine Encoder-Resets, keine Stream-Unterbrechungen. Der Bediener sieht ein flüssiges, kontinuierliches Video, während er komplexe PTZ-Bewegungen steuert.
Tests unter Worst-Case-Bedingungen
Wir testen dies, indem wir schnelle Preset-Touren skripten. Die Kamera wechselt mit null Wartezeit zwischen 8 Presets und erzwingt so eine konstante Bewegung über mehrere Achsen. Wir führen diesen Test 72 Stunden lang ununterbrochen im Batteriebetrieb durch. Wenn der Stream auch nur einmal abbricht, passt das Firmware-Team das Interleaving-Timing an oder verlängert die Dauer der sanften Startrampe.
Wie verhindern Sie, dass ein Batteriewechsel “Spannungseinbruch” zu einer falschen “Niedrigstrom”-Abschaltung führt?
Ich habe einmal ein System debuggt, das sich ständig bei “40% Batterie” abschaltete. Die Batterie war in Ordnung. Das BMS las die abgesackte Spannung während der Motorbewegung und geriet in Panik. Es dachte, die Batterie sei leer, obwohl sie tatsächlich nur unter starker Last stand.
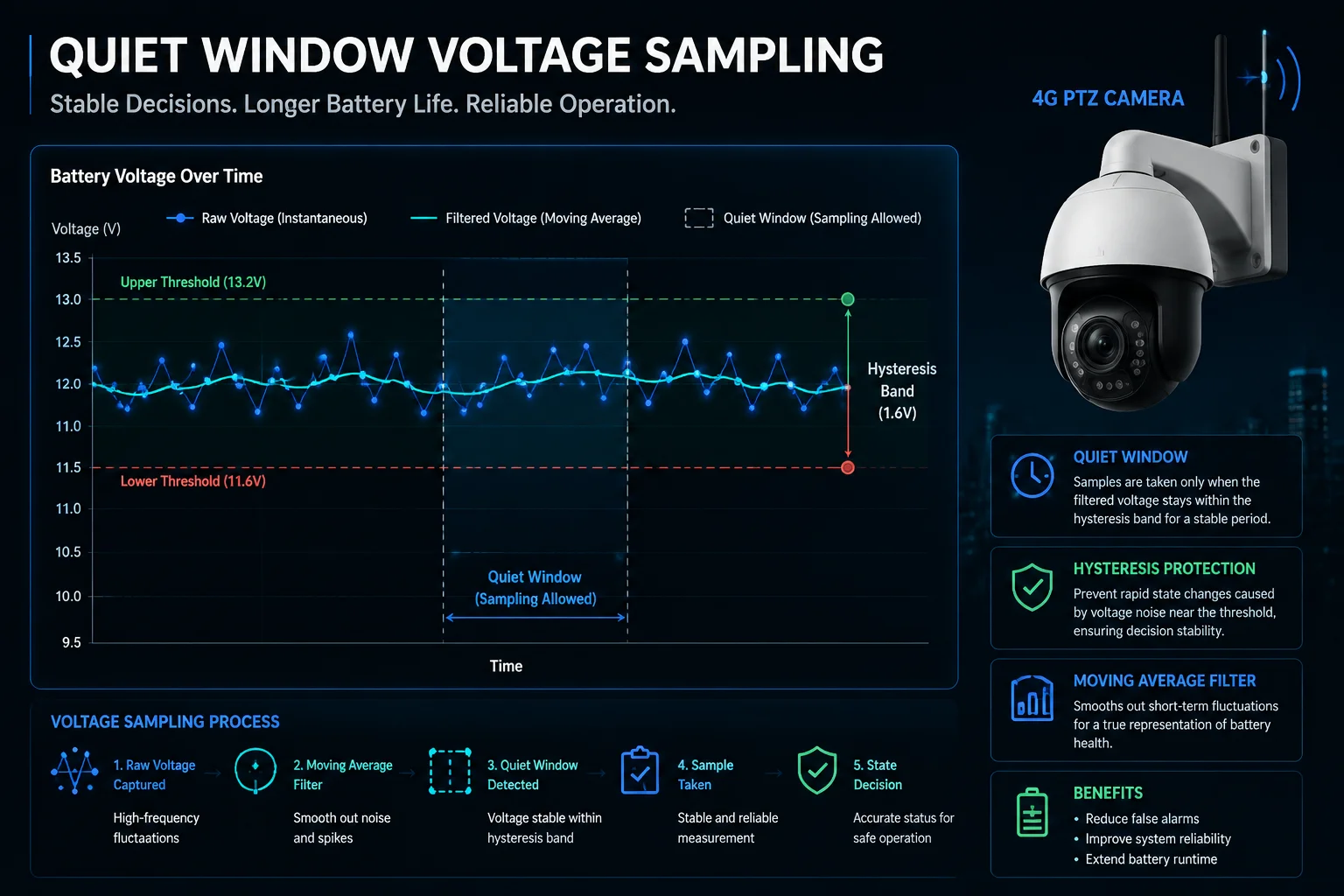
Wir verhindern Fehlabschaltungen, indem wir die Batteriespannung nur während Motorleerlaufperioden abtasten, einen gleitenden Mittelwertfilter auf die Spannungswerte anwenden und die Niedrigstromschwelle mit einem Hysterese-Band festlegen, das die erwartete Absackung unter Last berücksichtigt. Das System unterscheidet zwischen echter schwacher Batterie und vorübergehendem Spannungseinbruch.
 Batteriespannungsabfallverhinderung falsche Niedrigstromabschaltung PTZ-Kamera
Batteriespannungsabfallverhinderung falsche Niedrigstromabschaltung PTZ-Kamera
Die Grundursache für Fehlabschaltungen
Die Klemmenspannung einer Lithiumbatterie sinkt unter Last. Das ist normale Physik. Die Batterie hat einen Innenwiderstand. Wenn Strom durch diesen Widerstand fließt, fällt die Spannung ab (Ohmsches Gesetz: V = I × R). Eine Batterie, die im Ruhezustand 12,0 V anzeigt, kann 11,2 V anzeigen, wenn sie 5 A an die Motoren liefert. Wenn die Firmware die Spannung während dieses 5-A-Zugs liest und mit einem statischen Schwellenwert (z. B. 11,0 V = Abschaltung) vergleicht, kann dies einen Fehlalarm auslösen.
Intelligente Spannungserfassung
Unsere Firmware verwendet eine Technik, die ich “Quiet Window Sampling” nenne. Das System weiß, wann Motoren aktiv sind, da es sie steuert. Daher nimmt es die Batteriespannungswerte nur in Perioden auf, in denen sich kein Motor bewegt. Wenn sich die Kamera kontinuierlich bewegt (wie bei einer Patrouillen-Tour), wartet die Firmware auf die kurze Pause zwischen den Preset-Übergängen, um eine saubere Spannungsprobe zu erhalten.
Das Hysterese-Band
| Batteriestatus | Spannungsschwelle | Aktion |
|---|---|---|
| Normalbetrieb | Über 11,5 V (im Ruhezustand) | Alle Systeme aktiv |
| Warnung bei niedrigem Stromverbrauch | Unter 11,5 V für 30 Sekunden | Reduziere nicht wesentliche Aufgaben |
| Kritisch niedrig | Unter 10,8 V für 60 Sekunden | Anmutige Abschaltsequenz |
| Wiederherstellung | Über 12,0 V für 10 Sekunden | Normalen Betrieb fortsetzen |
Beachten Sie den Unterschied zwischen dem Abschalt-Schwellenwert (10,8 V) und dem Wiederherstellungs-Schwellenwert (12,0 V). Dies ist Hysterese. Es verhindert, dass das System schnell zwischen Abschaltung und Wiederherstellung wechselt.
Gleitender Mittelwertfilter
Die Firmware verwaltet einen gleitenden Durchschnitt der letzten 10 Spannungsmessungen, die jeweils im Abstand von 5 Sekunden während Leerlaufphasen aufgenommen werden. Eine einzelne niedrige Messung löst nichts aus. Der Durchschnitt muss für einen längeren Zeitraum unter dem Schwellenwert bleiben. Dies eliminiert Fehlalarme durch kurze transiente Ereignisse.
BMS-Koordination
Für Davids Installationen mit externen Akkupacks empfehlen wir ein Batteriemanagementsystem (BMS)9 mit einer Entladeabschaltung von nicht mehr als 10,0 V (für ein 12-V-System). Dies gibt der internen Logik der Kamera Spielraum, um ein anmutiges Herunterfahren zu verwalten, bevor das BMS die Stromversorgung hart abschaltet. Wenn der BMS-Schwellenwert zu nahe am eigenen Schwellenwert der Kamera eingestellt ist, entsteht ein Wettlauf, bei dem beide versuchen, gleichzeitig herunterzufahren, was potenziell gespeicherte Aufnahmen beschädigen kann.
Die Anforderung einer Entladung von 10 A
David, das ist entscheidend für Ihre 40X-Kameras. Das BMS muss mindestens 10 A sofortige Entladung unterstützen. Viele handelsübliche Solarbatterie-Controller sind für 3-5 A ausgelegt. Das ist in Ordnung für eine statische Kamera. Aber eine 40X PTZ mit Schwenken, Neigen, Zoomen und IR-Beleuchtung kann kurzzeitig 8-9 A ziehen. Wenn Ihr BMS das nicht bewältigen kann, schaltet es den Strom ab und Sie geben der Kamera die Schuld. Die Kamera ist in Ordnung. Das BMS ist der Engpass.
Gibt es dedizierte Stromschienen auf der Platine, um die lauten Motoren vom 4K-Sensor zu isolieren?
Diese Lektion habe ich früh in meiner Karriere gelernt. Eine einzige gemeinsame Stromleitung zwischen einem Schrittmotor und einem Bildsensor erzeugte horizontale Streifen in jedem Bild. Das Rauschen wurde direkt durch die Stromversorgungsebene in die analogen Schaltungen des Sensors geleitet.
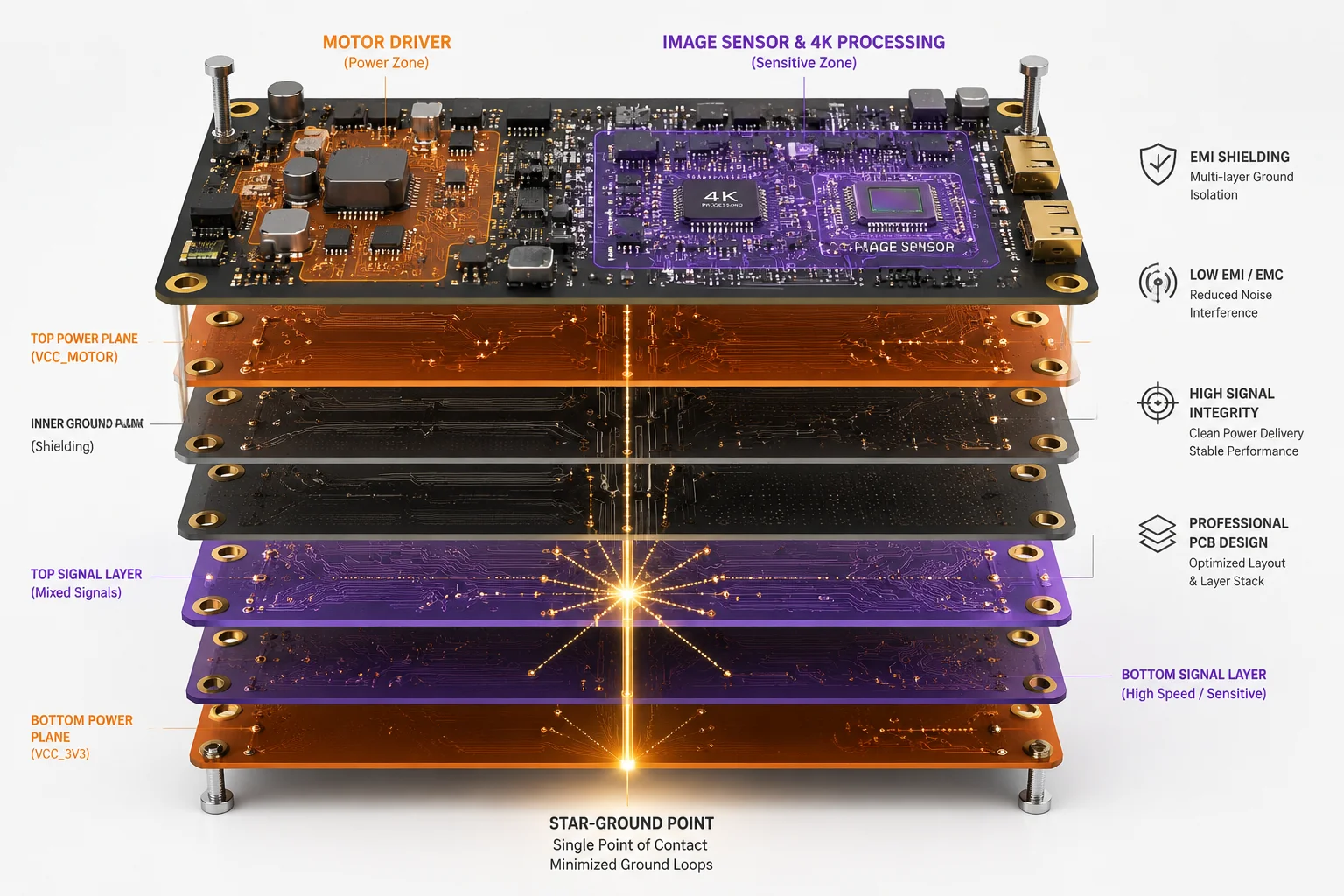
Ja. Unsere PCB verwendet physisch getrennte Stromversorgungsebenen mit dedizierten Kupferflächen für den Motortreiberbereich, den 4G-Modem-Bereich und den Bildbereich. Jeder Bereich hat seine eigene Regelungsstufe, und die Masseflächen sind an einem einzigen Sternpunkt verbunden, um Masseschleifenstörungen zu vermeiden.
 Dedizierte Stromschienen auf der PCB trennen Motoren vom 4K-Sensor
Dedizierte Stromschienen auf der PCB trennen Motoren vom 4K-Sensor
Warum Stromschienen-Isolation für 4K nicht verhandelbar ist
Ein 4K-Bildsensor arbeitet mit extrem kleinen analogen Signalen. Die ausgelesenen Pixelspannungen liegen im Millivolt-Bereich. Ein Motor-Treiber, der mit 20 kHz schaltet, erzeugt elektromagnetische Interferenzen (EMI), die leicht in diese winzigen Signale einkoppeln können. Das Ergebnis sind sichtbare Störungen im Bild: Streifenbildung, flackernde Belichtung oder Farbfehler.
Die Drei-Zonen-PCB-Architektur
Unsere PCB ist in drei verschiedene Stromzonen unterteilt:
Zone 1: Motorstromversorgung Diese Zone führt die Hochstrom-, verrauschten Signale. Der Motor-Treiber-IC, die Motoranschlüsse und die Hauptkondensatoren befinden sich alle hier. Die Kupferbahnen sind breit (um 3-5A zu bewältigen) und kurz (um die Induktivität zu minimieren). Diese Zone hat ihre eigene Massefläche, die an einem bestimmten Punkt mit der Hauptmasse verbunden ist.
Zone 2: Digital/Kommunikation Das 4G-Modem, SoC, Speicher und Datenspeicher befinden sich hier. Diese Zone erhält saubere, geregelte Leistung vom PMIC. Sie hat ihre eigene Massefläche. Die 4G-Antennen-Zuleitung wird so weit wie physikalisch möglich von Zone 1 entfernt verlegt.
Zone 3: Analog/Bildverarbeitung Der 4K-Sensor, sein Taktgenerator und die analoge Front-End-Schaltung befinden sich hier. Dies ist die empfindlichste Zone. Sie erhält die sauberste Leistung, oft über einen dedizierten rauscharms-LDO-Regler. Die Massefläche hier ist solide und ununterbrochen, ohne dass Hochgeschwindigkeits-Digitalspuren sie kreuzen.
Stern-Masse-Topologie
Die Stern-Masse-Topologie6 Der Ansatz bedeutet, dass alle drei Zonen ihre Masseflächen an einem einzigen Punkt nahe dem Batterie-Eingangsstecker verbinden. Der Motor-Rückstrom fließt über seinen eigenen dedizierten Pfad zurück und passiert niemals den Sensor oder das Modem.
Physikalische Trennung auf der Platine
Über die elektrische Isolierung hinaus wahren wir physische Distanz. Der Motor-Treiber-IC befindet sich am gegenüberliegenden Ende der PCB vom Bildsensor. Der 4G-Modem-Antennenanschluss befindet sich an einer anderen Kante der Platine als die Motoranschlüsse. Dies reduziert sowohl leitungsgebundene als auch abgestrahlte Kopplung.
EMI-Abschirmung
In einigen unserer High-End-Modelle fügen wir Metall hinzu EMI-Abschirmung7 (kleine Weißblechdosen, die über empfindlichen Abschnitten verlötet sind). Das 4G-Modem-Modul hat oft eine eigene Abschirmung. Die Taktkreisschaltung des Bildsensors kann eine Abschirmung haben. Diese blockieren abgestrahlte Emissionen vom Motor-Treiber, die empfindliche Komponenten durch die Luft erreichen.
David, für Ihre 40X-Kameras, die Nummernschilder aus 200 Metern Entfernung erfassen, ist die Bildqualität alles. Eine verrauschte Stromschiene würde Ihre effektive Auflösung verschlechtern. Unsere Schienenisolierung stellt sicher, dass der 4K-Sensor saubere, scharfe Bilder liefert, unabhängig davon, was die Motoren tun.
Schlussfolgerung
Spannungsabfallunterdrückung in PTZ-Solarkameras erfordert eine mehrschichtige Verteidigung: Hauptkondensatoren für sofortige Energie, S-Kurven-Softstart für Stromregelung, intelligente PMIC-Regelung für Modulisolierung und Phasenverschränkung zur Vermeidung von Spitzenüberlappungen. Jede Schicht schützt die nächste.
1. Ein Buck-Boost-Wandler kann die Spannung erhöhen oder senken und eine stabile Ausgangsspannung trotz Spannungseinbrüchen am Eingang aufrechterhalten. ︎↩︎ 2. PMIC integriert mehrere Spannungsregler und Verwaltungsfunktionen für verschiedene Untersysteme. ︎↩︎ 3. S-Kurven-Beschleunigungsrampen beschleunigen die Motorgeschwindigkeit im Laufe der Zeit sanft und reduzieren Stromspitzen. ︎↩︎ 4. Gestaffelte Motorstartzeiten verhindern überlappende Spitzenströme von mehreren Motoren. ︎↩︎ 5. Bulk-Kondensatoren speichern Energie, um beim Motorstart sofort Strom zu liefern und Spannungsabfälle zu reduzieren. ︎↩︎ 6. Sternmasse verbindet mehrere Masseflächen an einem einzigen Punkt, um Masseschleifen zu vermeiden. ︎↩︎ 7. EMI-Abschirmungen blockieren abgestrahlte Störungen von Motorsteuerungen, um empfindliche Komponenten zu schützen. ︎↩︎ 8. LDO liefert eine saubere, stabile Spannung mit minimalem Dropout und isoliert empfindliche Sensoren von Netzrauschen. ︎↩︎ 9. BMS überwacht und schützt den Akku; seine Entladungsschwelle muss mit den Schwellenwerten der Kamera kompatibel sein. ︎↩︎