
لقد شاهدت العديد من المثبتين يهدرون المال على كاميرات PTZ8 حيث يطلق الليزر شعاعًا ثابتًا في الظلام. يتحرك الهدف أقرب، وتنفجر الصورة باللون الأبيض. يتحرك أبعد، ولا ترى شيئًا.
نعم، يتم تشغيل الليزر وزاوية الشعاع في الوقت الفعلي بواسطة بيانات المسافة بالذكاء الاصطناعي. تقوم شريحة الذكاء الاصطناعي بحساب مسافة الهدف باستخدام حجم البكسل وموضع التقريب وزاوية الميل، ثم تصدر أوامر لمحرك خطوي دقيق لضبط زاوية تباعد الليزر إطارًا بإطار. يُطلق على هذا مزامنة الليزر مع التقريب1.
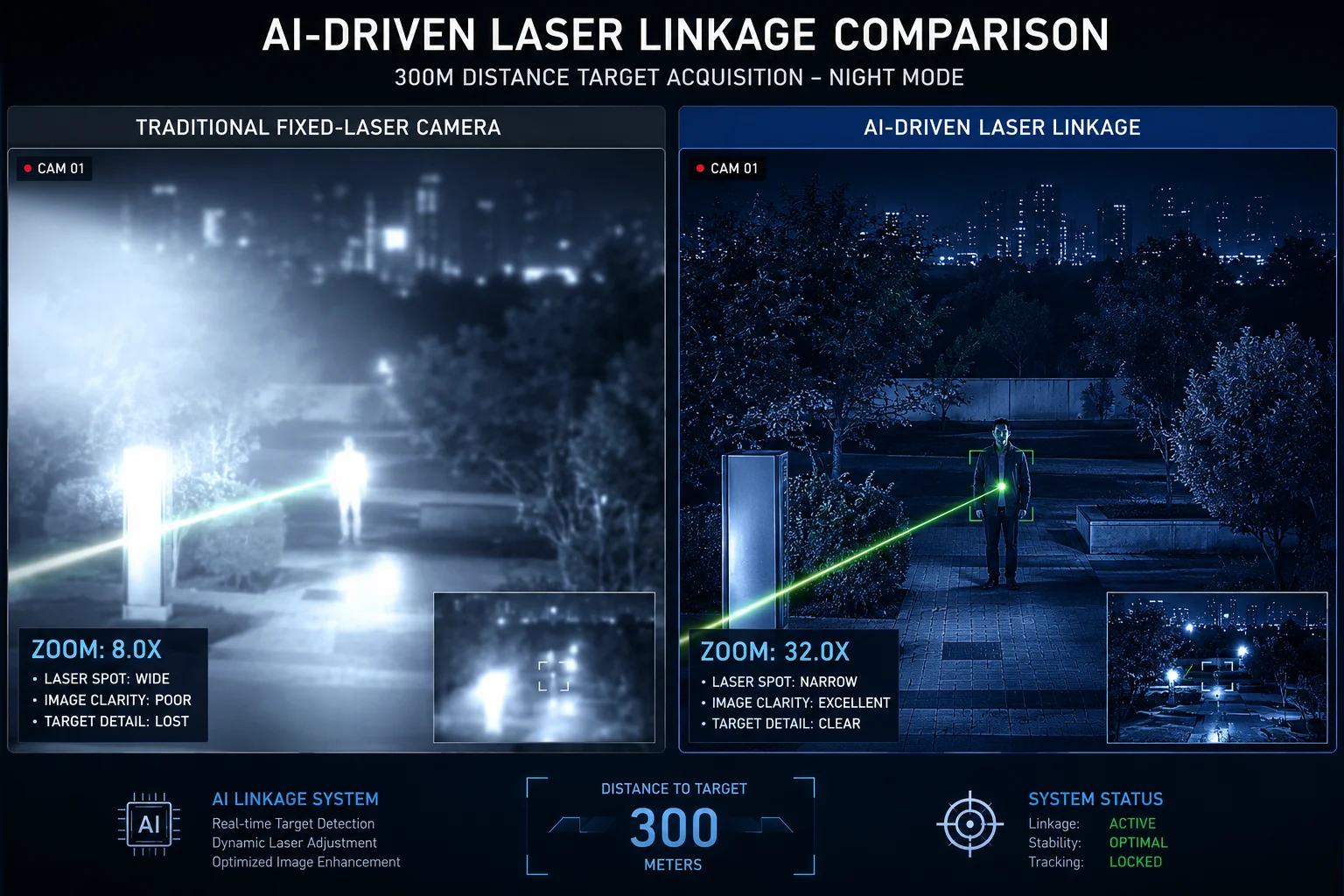
 رؤية ليلية لكاميرا PTZ مع ربط تقريب الليزر بالذكاء الاصطناعي
رؤية ليلية لكاميرا PTZ مع ربط تقريب الليزر بالذكاء الاصطناعي
أدناه، سأوضح بالتفصيل كيف يعمل هذا في كل مرحلة - من اللحظة التي تقفل فيها الكاميرا على هدف، إلى كيفية تغير عرض الشعاع، إلى متى يظل الليزر مطفأً تمامًا. إذا كنت تحدد كاميرات PTZ للمواقع البعيدة، فهذه هي التفاصيل التي تفصل بين نشر موثوق به واستدعاء مكلف.
جدول المحتويات
هل يضمن “ربط تقريب الليزر” المستند إلى الذكاء الاصطناعي أن الضوء يتبع دائمًا تركيز الكاميرا؟
اعتقدت سابقًا أن “ربط تقريب الليزر” كان مجرد عبارة تسويقية. ثم رأيت الفرق على بث مباشر على بعد 300 متر - كاميرا واحدة بليزر ثابت، وأخرى بربط مدفوع بالذكاء الاصطناعي. كان الفرق كبيرًا جدًا.
يضمن ربط تقريب الليزر المستند إلى الذكاء الاصطناعي أن الضوء يتبع دائمًا تركيز الكاميرا. يقرأ النظام نسبة التقريب البصري الحالية وزاوية الميل في الوقت الفعلي، ثم يرسم إحداثيات ثلاثية الأبعاد لمحرك الليزر بحيث يظل مركز الشعاع مثبتًا على المنطقة الدقيقة التي تراها العدسة.
 ربط تقريب الليزر بالذكاء الاصطناعي يتبع تركيز الكاميرا
ربط تقريب الليزر بالذكاء الاصطناعي يتبع تركيز الكاميرا
كيف يعمل الربط فعليًا
الفكرة الأساسية بسيطة: الليزر لديه محركه الصغير الخاص. يأخذ هذا المحرك أوامر من نفس شريحة الذكاء الاصطناعي التي تتحكم في رأس PTZ. في كل مرة تقوم فيها العدسة بالتقريب أو التصغير، يعيد الذكاء الاصطناعي حساب شيئين - مكان مركز الإطار في الفضاء ثلاثي الأبعاد، ومدى اتساع مجال الرؤية عند مستوى التقريب هذا.
يقوم محرك الليزر بعد ذلك بضبط زاوية الشعاع لتتناسب معها. إذا كانت العدسة عند تقريب 40X تنظر إلى شريحة ضيقة من سياج على بعد 400 متر، فإن الليزر يضيق إلى حوالي 1 درجة إلى 2 درجة. إذا قام المشغل بالتراجع إلى 10X لمسح منطقة أوسع على بعد 80 مترًا، فإن الليزر يتسع إلى ربما 8 درجات إلى 10 درجات.
حلقة التغذية الراجعة
هذه ليست عملية حسابية لمرة واحدة. إنها تعمل كحلقة مغلقة:
- يقرأ الذكاء الاصطناعي موضع مشفر التقريب الحالي.
- يقرأ مواضع مشفرات التحريك الأفقي والرأسي.
- يحسب مجال الرؤية المتوقع عند البعد البؤري الحالي.
- يرسل أمر نبضة إلى الليزر محرك متدرج4.
- تحرك المحرك عدسة الليزر لتتطابق.
- يتحقق الذكاء الاصطناعي من سطوع الصورة في المنطقة المركزية.
- إذا كان المركز ساطعًا جدًا أو داكنًا جدًا، فإنه يضبط طاقة الليزر (دورة عمل PWM) بدقة.
تعمل هذه الحلقة عدة مرات في الثانية. والنتيجة هي أنه بغض النظر عن مدى سرعة تكبير المشغل أو تحريكه، تظل بقعة الليزر في المنتصف وبالحجم الصحيح.
لماذا تفشل الليزرات ذات الزاوية الثابتة
ليزر ذو زاوية ثابتة له عرض شعاع واحد. عند المدى القريب، يغمر الإطار ويفرط في تعريض كل شيء. عند المدى الطويل، يكون الشعاع واسعًا جدًا وتنتشر الطاقة بشكل رفيع - تحصل على صورة باهتة وغير مفيدة. لا يوجد حل وسط.
| السيناريو | نتيجة الليزر الثابت | نتيجة الليزر المرتبط بالذكاء الاصطناعي |
|---|---|---|
| هدف على بعد 50 مترًا، تكبير 5X | فرط تعريض شديد، فقدان تفاصيل الوجه | يتسع الشعاع، تنخفض الطاقة، إضاءة متساوية |
| هدف على بعد 200 متر، تكبير 20X | حواف باهتة، بقعة مركزية ساخنة | يضيق الشعاع ليتناسب مع مجال الرؤية، ملء موحد |
| هدف على بعد 400 متر، تكبير 40X | بالكاد يصل أي ضوء مفيد إلى الهدف | يتوازى الشعاع إلى 1 درجة، طاقة كاملة على الهدف |
لهذا السبب يطالب مدمجو الأنظمة الذين ينشرون في الحقول المفتوحة أو على طول المحيطات بالليزر المرتبط بالذكاء الاصطناعي. إنها ليست ميزة فاخرة. إنها الفرق بين كاميرا تعمل ليلاً وأخرى لا تعمل.
كيف يقوم الليزر بضبط عرض شعاعه تلقائيًا بينما تتعقب كاميرا PTZ شخصًا يتحرك أقرب؟
كان لدي عميل في تكساس طرح علي هذا السؤال بالضبط. كانت كاميراته تراقب ممر خط أنابيب. احتاج الحراس إلى تتبع شخص يمشي باتجاه السياج من مسافة 500 متر. أراد أن يعرف: هل ستبقى الصورة واضحة طوال الطريق؟
بينما تتعقب كاميرا PTZ شخصًا يقترب، يعيد الذكاء الاصطناعي باستمرار حساب مسافة الهدف باستخدام نمو حجم البكسل وموضع التقريب. ثم يأمر محرك الليزر بتوسيع زاوية الشعاع خطوة بخطوة، مع تقليل طاقة الليزر في نفس الوقت لمنع التعرض المفرط. التعديل سلس وتلقائي.
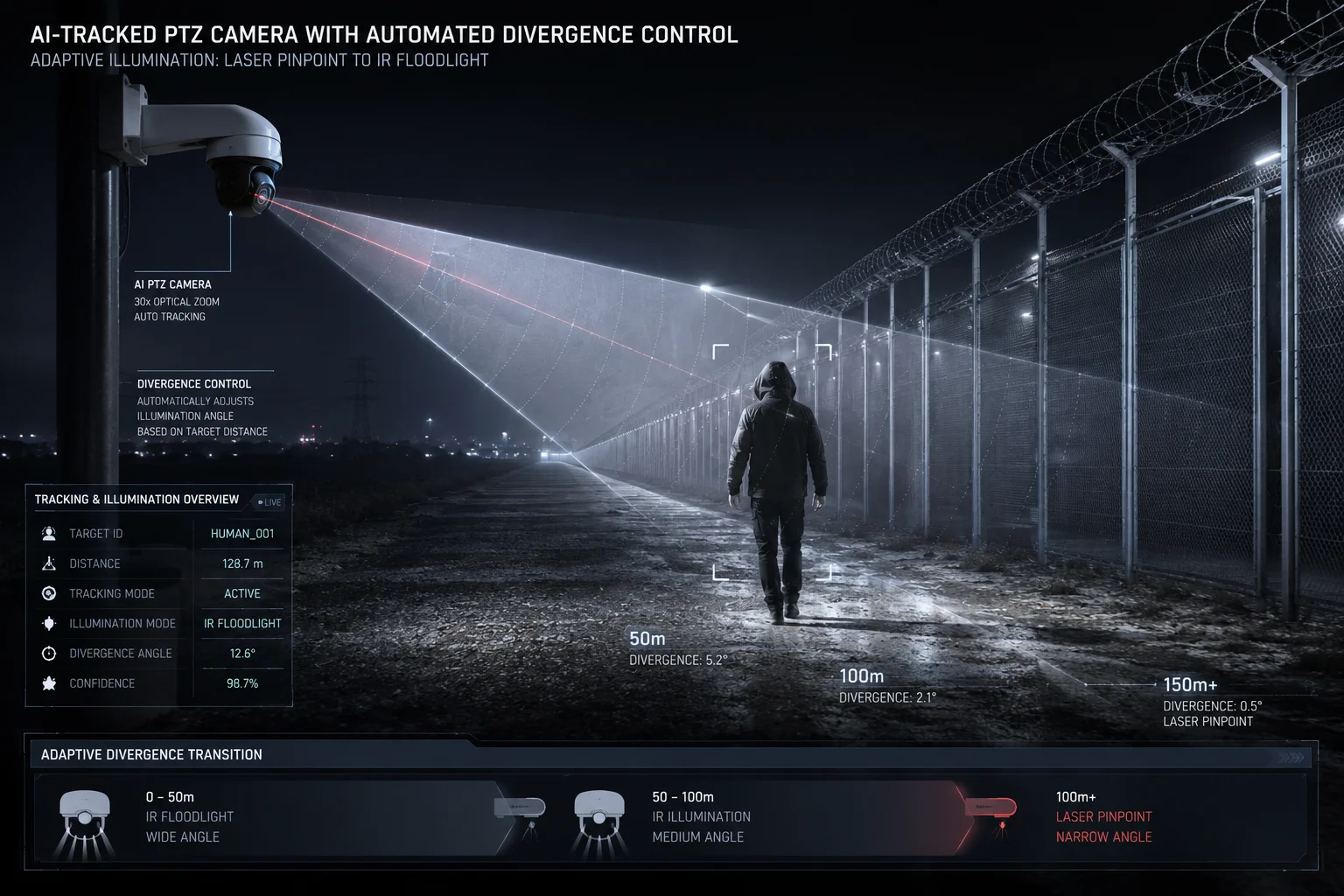 ضبط عرض شعاع الليزر تلقائيًا لتتبع PTZ
ضبط عرض شعاع الليزر تلقائيًا لتتبع PTZ
طريقة حساب المسافة
لا يستخدم الذكاء الاصطناعي مقياس مسافة منفصل في معظم الطرز. بدلاً من ذلك، يستخدم طريقة قائمة على البرامج. إليك المنطق:
- يعرف الذكاء الاصطناعي الطول البؤري الحالي (من مشفر التقريب).
- يعرف الارتفاع الرأسي بالبكسل للشخص المكتشف.
- الإنسان العادي يبلغ طوله حوالي 1.7 متر.
- باستخدام صيغة العدسة الرقيقة2, ، يحسب المسافة: $D = (H \times f) / (h \times sensor_size)$ حيث H هو الارتفاع الحقيقي، f هو الطول البؤري، h هو الارتفاع بالبكسل على المستشعر.
مع اقتراب الشخص، يزداد ارتفاعه بالبكسل. يرى الذكاء الاصطناعي هذا النمو إطارًا تلو الآخر ويقوم بتحديث قيمة المسافة في كل دورة.
ما يحدث لليزر أثناء الاقتراب
دعني أشرح تسلسلًا حقيقيًا:
- تم اكتشاف شخص على بعد 350 مترًا. الكاميرا عند تقريب 35X. الليزر عند الحد الأدنى من التباعد (حوالي 1.5 درجة). الطاقة عند 80% PWM.
- شخص على بعد 200 متر. يقوم المشغل أو التتبع التلقائي بسحب التقريب إلى 20X. يتسع الليزر إلى حوالي 4 درجات. تنخفض الطاقة إلى 50%.
- شخص على بعد 80 مترًا. التكبير عند 10X. يفتح الليزر على 8 درجات. ينخفض الطاقة إلى 25%.
- شخص على بعد 30 مترًا. التكبير عند 5X. يقرر الذكاء الاصطناعي أن مصابيح LED بالأشعة تحت الحمراء المدمجة يمكنها التعامل مع هذا النطاق. ينطفئ الليزر. تتولى مصابيح LED بالأشعة تحت الحمراء.
التحكم التكيفي في الطاقة
لا يتعلق تعديل الطاقة بالمسافة فقط. يقرأ الذكاء الاصطناعي أيضًا متوسط سطوع المنطقة الوسطى من الصورة (يُطلق على هذا أحيانًا AGC - ردود فعل التحكم التلقائي في الكسب3). إذا كان الهدف يرتدي قميصًا أبيض يعكس الكثير من الضوء، فسيقوم الذكاء الاصطناعي بتقليل طاقة الليزر بشكل أكبر. إذا كان الهدف يرتدي ملابس داكنة، فإنه يزيد الطاقة.
هذا يمنع مشكلتين شائعتين:
- نقطة مركزية ساخنة: حيث يكون وسط الإطار أبيض ساطعًا ولكن الحواف داكنة.
- هدف مضاء بشكل غير كافٍ: حيث يكون الشخص خافتًا جدًا بحيث لا يمكن التعرف عليه حتى لو كان الليزر قيد التشغيل.
الجانب الميكانيكي
تغيير عرض الشعاع مادي. داخل وحدة الليزر، توجد عدسة صغيرة تتحرك للأمام أو للخلف على مسار مدفوع بمحرك خطوي. يؤدي تحريك العدسة بالقرب من ديود الليزر إلى نشر الشعاع. يؤدي تحريكها بعيدًا إلى تجميع (تضييق) الشعاع. يتمتع المحرك بدقة كافية لإجراء خطوات صغيرة جدًا، لذا يبدو الانتقال سلسًا على الكاميرا - لا توجد قفزات مفاجئة في السطوع.
| نطاق المسافة | زاوية شعاع الليزر | طاقة الليزر (PWM) | مصابيح LED إضافية بالأشعة تحت الحمراء |
|---|---|---|---|
| 300–500 متر | 0.5 درجة–2 درجة | 70%–100% | إيقاف التشغيل |
| 100–300 متر | 1. 2°–6° | 2. 40%–70% | إيقاف التشغيل |
| 3. 30–100 م | 4. 6°–10° | 5. 15%–40% | 6. في وضع الاستعداد |
| 7. < 30 م | 8. إيقاف تشغيل الليزر | 0% | 9. نشط |
10. هذا التمرير المتدرج هو ما يجعل النظام موثوقًا به عبر نطاق التقريب الكامل دون أي تدخل يدوي.
هل سيظل الليزر مطفأً إذا حدد الذكاء الاصطناعي أن الهدف ضمن النطاق الفعال لمصابيح LED بالأشعة تحت الحمراء؟
11. أتلقى هذا السؤال كثيرًا من المدمجين الذين يقلقون بشأن استهلاك الطاقة في المواقع الشمسية. كل واط مهم عند التشغيل بالبطارية.
12. نعم، يظل الليزر متوقفًا عندما يحدد الذكاء الاصطناعي أن الهدف ضمن 13. النطاق الفعال لمصابيح LED بالأشعة تحت الحمراء5. 14. . يستخدم النظام فحصًا مزدوج الشرط - مستوى الإضاءة المحيطة من مستشعر ضوئي بالإضافة إلى المسافة المحسوبة بواسطة الذكاء الاصطناعي للهدف. إذا قالت كلا الشرطين أن مصابيح LED بالأشعة تحت الحمراء كافية، فلن يتم تشغيل الليزر أبدًا. هذا يوفر طاقة كبيرة في المواقع التي تعمل بالطاقة الشمسية والبطارية.
 15. إيقاف تشغيل الليزر نطاق مصباح LED بالأشعة تحت الحمراء كاميرا PTZ تعمل بالطاقة الشمسية
15. إيقاف تشغيل الليزر نطاق مصباح LED بالأشعة تحت الحمراء كاميرا PTZ تعمل بالطاقة الشمسية
16. منطق القرار
17. لا يتم التحكم في تنشيط الليزر بواسطة مستشعر ضوء بسيط وحده. إنه يستخدم ما أسميه منطق‘18. البوابة المزدوجة منطق’6:
20. البوابة 1 - هل الجو مظلم بما يكفي للحاجة إلى أي ضوء إضافي؟ يقيس مستشعر الصور الموجود على غلاف الكاميرا شدة الإضاءة المحيطة. إذا كان المشهد أعلى من عتبة محددة (عادة حوالي 1-3 لوكس)، فلن يتم تنشيط أي ضوء إضافي على الإطلاق. تبقى الكاميرا في وضع الألوان أو وضع الألوان في الإضاءة المنخفضة.
البوابة 2 - هل الهدف خارج نطاق وصول مصابيح الأشعة تحت الحمراء؟ بمجرد أن تتحول الكاميرا إلى الوضع الليلي (أقل من عتبة اللوكس)، يتحقق الذكاء الاصطناعي من مسافة الهدف. إذا كان الهدف ضمن النطاق الفعال لمصابيح الأشعة تحت الحمراء المدمجة (عادةً 30-80 مترًا حسب الطراز)، يظل الليزر في وضع الاستعداد. فقط عندما يتجاوز الهدف هذا النطاق، يتم إطلاق الليزر.
لماذا هذا مهم للنشر الشمسي
يمكن لوحدة الليزر عالية الطاقة أن تسحب 10-20 واط. في نظام PTZ الشمسي ببطارية 60-100 أمبير في الساعة، يعد هذا حملًا كبيرًا. إذا كان الليزر يعمل طوال الليل بغض النظر عما إذا كانت الأهداف قريبة أو بعيدة، فإنك تستنزف البطارية بشكل أسرع وتقصر عمر دورتها.
من خلال إبقاء الليزر مطفأً عندما تتولى مصابيح الأشعة تحت الحمراء المهمة، يمكن للنظام خفض استهلاك الطاقة ليلاً بنسبة 30٪ إلى 50٪ في الليالي النموذجية حيث تحدث معظم الأنشطة على بعد 100 متر من الكاميرا.
تنشيط النبضات بناءً على الأحداث
هناك وضع ثالث يقع بين “التشغيل الدائم” و “الإيقاف الدائم”. في وضع الاستعداد منخفض الطاقة (شائع في مواقع الطاقة الشمسية 4G)، تعمل الكاميرا بمعدل إطارات مخفض مع مصابيح الأشعة تحت الحمراء فقط. إذا اكتشف الذكاء الاصطناعي صورة ظلية على شكل إنسان على حافة نطاق الأشعة تحت الحمراء، فإنه يطلق الليزر في نبضة قصيرة - تكفي فقط لالتقاط بضع إطارات عالية الدقة للتأكيد الثانوي.
إذا أكد الذكاء الاصطناعي الهدف (جسم بشري، مركبة، أو أي كائن مبرمج آخر)، يظل الليزر قيد التشغيل ويدخل النظام في وضع التتبع الكامل. إذا تبين أن الشكل حيوان أو فرع متحرك، ينطفئ الليزر مرة أخرى في غضون 1-2 ثانية. هذا النهج “تنشيط النبضات” يحافظ على متوسط استهلاك الطاقة منخفضًا جدًا مع الاستمرار في التقاط التهديدات الحقيقية عن بعد.
فائدة عملية للمدمجين
بالنسبة لـ David والمدمجين الآخرين الذين ينشرون في مواقع خارج الشبكة - المزارع، حقول النفط، مواقع البناء، المناطق الحدودية - يعني هذا التنشيط المدفوع بالذكاء:
- ألواح شمسية أصغر (تكلفة مشروع أقل).
- عمر بطارية أطول بين الاستبدالات.
- عدد أقل من ذروات الطاقة الإنذارية الكاذبة التي يمكن أن تسبب انقطاعًا في النظام.
- يزداد عمر ديود الليزر نفسه لأنه يعمل لساعات أقل إجمالاً.
هل يمكنني رؤية المسافة في الوقت الفعلي (بالمتر) للهدف التي يحسبها محرك الذكاء الاصطناعي؟
أتذكر المرة الأولى التي طلب مني فيها عميل عرض تراكب المسافة في عرض توضيحي مباشر. لم يصدق أن الرقم حقيقي حتى قسناه بمقياس مسافة ليزري وحصلنا على نفس النتيجة في حدود 5٪.
نعم، يمكنك رؤية المسافة في الوقت الفعلي للهدف على الشاشة. يقوم محرك الذكاء الاصطناعي بحساب المسافة باستخدام القياس المستند إلى البكسل ويخرجه كتراكب OSD (عرض على الشاشة) بالأمتار. يتم تحديث هذه القيمة باستمرار مع تحرك الهدف أو تكبير الكاميرا.
![]() كاميرا PTZ مع عرض مسافة الذكاء الاصطناعي في الوقت الفعلي على الشاشة
كاميرا PTZ مع عرض مسافة الذكاء الاصطناعي في الوقت الفعلي على الشاشة
كيف تظهر المسافة
تظهر قيمة المسافة كتراكب نصي على بث الفيديو. تظهر عادةً بالقرب من الصندوق المحيط بالهدف المتعقب أو في زاوية ثابتة من الشاشة. التنسيق بسيط - شيء مثل “D: 247m” - ويتم تحديثه عدة مرات في الثانية.
هذه البيانات متاحة أيضًا عبر واجهة برمجة تطبيقات الكاميرا (عادةً عبر ONVIF7 أو حزمة تطوير برامج خاصة). هذا يعني أن نظام إدارة الفيديو (VMS) أو مسجل الفيديو الشبكي (NVR) الخاص بك يمكنه سحب قيمة المسافة وتسجيلها بجانب الفيديو. يستخدم بعض المدمجين هذا للتقارير الآلية - على سبيل المثال، “تم اكتشاف متسلل لأول مرة على بعد 380 مترًا، ووصل إلى السياج على بعد 12 مترًا، وبلغ إجمالي مدة التتبع 4 دقائق”.”
الدقة والقيود
حساب المسافة المستند إلى البكسل ليس دقيقًا مثل جهاز قياس المسافة بالليزر المخصص. ولكن لتطبيقات الأمان، فهو دقيق بما فيه الكفاية. إليكم نطاقات الدقة النموذجية:
| نطاق المسافة | الدقة النموذجية | الملاحظات |
|---|---|---|
| 3. 30–100 م | ±5–8% | ثقة عالية، حجم بكسل كبير |
| 100–300 متر | ±8–12% | ثقة جيدة، حجم بكسل متوسط |
| 300–500 متر | ±12–18% | ثقة أقل، حجم بكسل صغير |
تعتمد الدقة على عدة عوامل:
- نوع الهدف: يعطي الشخص الواقف نتائج أفضل من الشخص المتربص لأن افتراض الارتفاع أكثر موثوقية.
- مستوى التقريب: التكبير العالي يعطي المزيد من البكسلات على الهدف، مما يحسن الحساب.
- زاوية الميل: الزوايا السفلية الحادة (مثل كاميرا مثبتة عالياً جداً تنظر إلى هدف قريب) تُدخل المزيد من الخطأ الهندسي.
ما يفعله المدمجون بهذه البيانات
بخلاف مجرد عرض الرقم على الشاشة، تعود بيانات المسافة لتغذية النظام بأكمله:
- التحكم بالليزر: كما نوقش أعلاه، يستخدم الليزر هذه المسافة لضبط زاوية الشعاع وقوته.
- مناطق التنبيه: يمكنك تعيين قواعد مثل “تشغيل الإنذار فقط إذا تم اكتشاف شخص على بعد 50 مترًا من السياج”. يستخدم الذكاء الاصطناعي حساب المسافة الخاص به لفرض هذه القاعدة دون الحاجة إلى رسم مضلعات معقدة على الخريطة.
- مراجعة جنائية: بعد وقوع حادث، يمكنك مراجعة اللقطات ورؤية المسافة الدقيقة التي كان عليها المتسلل في كل لحظة. يساعد هذا في القضايا القضائية والمطالبات التأمينية.
- سلوك التكبير التلقائي: تستخدم بعض الأوضاع المسافة لتحديد مدى التكبير. إذا كان الهدف على بعد 200 متر، فقد تقوم الكاميرا بالتكبير إلى 25 مرة تلقائيًا. إذا كان الهدف على بعد 50 مترًا، فإنها تبقى عند 8 مرات للحفاظ على السياق في الإطار.
ملاحظة حول المعايرة
لكي تكون قراءة المسافة دقيقة، تحتاج الكاميرا إلى معرفة ارتفاع تركيبها. أثناء الإعداد، يقوم المثبت بإدخال ارتفاع التركيب (على سبيل المثال، 6 أمتار على عمود). يستخدم الذكاء الاصطناعي هذه القيمة جنبًا إلى جنب مع زاوية الميل لتحسين حسابه المثلثي. إذا تم إدخال الارتفاع بشكل خاطئ، فستكون جميع قراءات المسافة خاطئة. هذه خطوة إعداد لمرة واحدة تستغرق 30 ثانية ولكنها تحدث فرقًا حقيقيًا في الدقة.
الخاتمة
الليزر في كاميرا PTZ حديثة مدعومة بالذكاء الاصطناعي ليس مصباحًا كاشفًا غبيًا. إنه أداة دقيقة - يتم تنشيطها وتوجيهها وتشغيلها بالكامل بواسطة بيانات المسافة بالذكاء الاصطناعي في الوقت الفعلي لتقديم صور ليلية واضحة مع توفير الطاقة في كل إطار.
1. انظر كيف تقوم الشركات المصنعة بتطبيق التكبير المتزامن بالليزر في كاميرات PTZ. ︎↩︎ 2. المبدأ البصري وراء حساب المسافة من ارتفاع البكسل. ︎↩︎ 3. كيف يقوم AGC بضبط طاقة الليزر بناءً على سطوع الصورة. ︎↩︎ 4. المحرك الدقيق الذي يضبط زاوية شعاع الليزر. ︎↩︎ 5. العوامل التي تحدد المدى الفعال لمصابيح LED بالأشعة تحت الحمراء في كاميرات المراقبة. ︎↩︎ 6. شرح التحقق من الشرطين لتنشيط الليزر. ︎↩︎ 7. البروتوكول القياسي للتفاعل مع بيانات وأدوات تحكم كاميرا PTZ. ︎↩︎ 8. نظرة عامة على تقنية كاميرات التحريك والإمالة والتكبير وتطبيقاتها. ︎↩︎