
Perdi a conta de quantas vezes um cliente me ligou frustrado porque suas câmeras capturaram um intruso em um ângulo, mas o perderam completamente no próximo.
Sim, um aplicativo bem projetado pode vincular várias câmeras PTZ para exibir a trilha de movimento de um único alvo em um mapa. Isso requer rastreamento de várias câmeras com IA, posições de câmera geo-referenciadas e uma plataforma de software unificada que une os eventos de detecção de cada PTZ em uma sobreposição de caminho contínuo.
 rastreamento de alvo de câmera PTZ múltipla em mapa
rastreamento de alvo de câmera PTZ múltipla em mapa
Rastrear uma pessoa ou veículo em um local grande com apenas uma câmera é quase impossível. Câmeras PTZ1 cobrem áreas amplas, mas têm pontos cegos durante o pan e zoom. O verdadeiro poder vem quando várias PTZs trabalham juntas como um sistema. Abaixo, detalho exatamente como isso funciona, o que cada peça do quebra-cabeça faz e o que você precisa para torná-lo realidade em seu projeto.
Índice
Como o Recurso “Rastreamento de Várias Câmeras” Transfere um Alvo de uma PTZ para Outra?
Lembro-me de um gerente de projeto no Texas me dizendo que seu maior medo não era o arrombamento em si, mas o momento em que o intruso saía da visão de uma câmera e simplesmente desaparecia.
O rastreamento de várias câmeras transfere um alvo usando algoritmos de reidentificação (Re-ID) de IA. Quando uma PTZ perde um alvo na borda de seu campo de visão, o sistema alerta a próxima câmera na cadeia de cobertura para capturar um sujeito que corresponda à mesma assinatura visual, como cor da roupa, forma do corpo e direção do movimento.
 rastreamento de alvo de IA de transferência de câmera PTZ
rastreamento de alvo de IA de transferência de câmera PTZ
Como a Transferência Realmente Funciona Passo a Passo
O processo de transferência não é mágica. Ele segue uma cadeia lógica clara que seu sistema executa em milissegundos.
Primeiro, a Câmera A detecta um alvo usando detecção de humanos ou veículos por IA. O sistema cria um “vetor de características2” para esse alvo. Pense nisso como uma impressão digital digital baseada na aparência. Isso inclui histograma de cores, proporções corporais e velocidade de caminhada.
Segundo, quando o alvo atinge a borda do campo de visão da Câmera A, o sistema verifica quais câmeras têm zonas de cobertura sobrepostas ou adjacentes. É aqui que o layout do seu mapa de câmeras importa. Cada PTZ deve ter sua coordenadas GPS3 ou posição mapeada em pixels registrada no software.
Em seguida, o sistema envia um “pré-alerta” para a Câmera B. A Câmera B começa a escanear sua área de cobertura em busca de qualquer objeto que corresponda ao vetor de características. Uma vez que encontra uma correspondência acima de limiar de confiança4 (geralmente 85% ou superior), ela trava e inicia o rastreamento automático PTZ.
Principais Requisitos Técnicos
| Componente | Função | Por que é importante |
|---|---|---|
| Motor de Re-Identificação por IA | Corresponde à aparência do alvo entre as câmeras | Sem ele, cada câmera trata cada pessoa como uma nova detecção |
| Registro do Mapa da Câmera | Define as relações espaciais entre as PTZs | O sistema precisa saber qual câmera é a “próxima” no caminho |
| Rede de Baixa Latência | Garante que os comandos de transferência cheguem a tempo | Um atraso de 2 segundos significa que o alvo anda 3 metros sem ser rastreado |
| Zonas de Campo de Visão Sobrepostas | Fornece uma área de transição para correspondência | Zero sobreposição significa zero chance de uma transferência limpa |
O que Acontece Quando a Transferência Falha?
Em condições do mundo real, a transferência pode falhar. Chuva, neblina ou um alvo trocando de roupa podem quebrar a correspondência de Re-Identificação. Bons sistemas lidam com isso mantendo um marcador de “última posição conhecida” no mapa e expandindo o raio de busca em câmeras próximas. Nossas câmeras de ligação de lente dupla ajudam aqui. A lente grande angular fixa mantém uma visão geral constante enquanto a lente PTZ aumenta o zoom. Mesmo que a PTZ perca o rastreamento, a lente grande ainda grava a área geral. Isso dá ao sistema uma segunda chance de readquirir o alvo.
Para locais que usam nossos sistemas PTZ solares 4G em locais fora da rede, a largura de banda é importante. O pacote de dados de Re-Identificação é pequeno, geralmente abaixo de 5KB por evento de transferência. Portanto, mesmo em uma conexão 4G com velocidade de upload limitada, o comando de transferência viaja rápido. O fluxo de vídeo pesado permanece local no cartão SD ou NVR. Apenas metadados e instantâneos de alerta são enviados via 4G.
Posso Ver uma Trilha de “Migalhas de Pão” do Caminho de um Intruso em Toda a Minha Propriedade?
Um dos meus clientes no Canadá administra uma fazenda solar de 200 acres. Ele me disse que pegar o ladrão na câmera era inútil se ele não pudesse mostrar à polícia exatamente onde eles andaram e quais painéis eles tocaram.
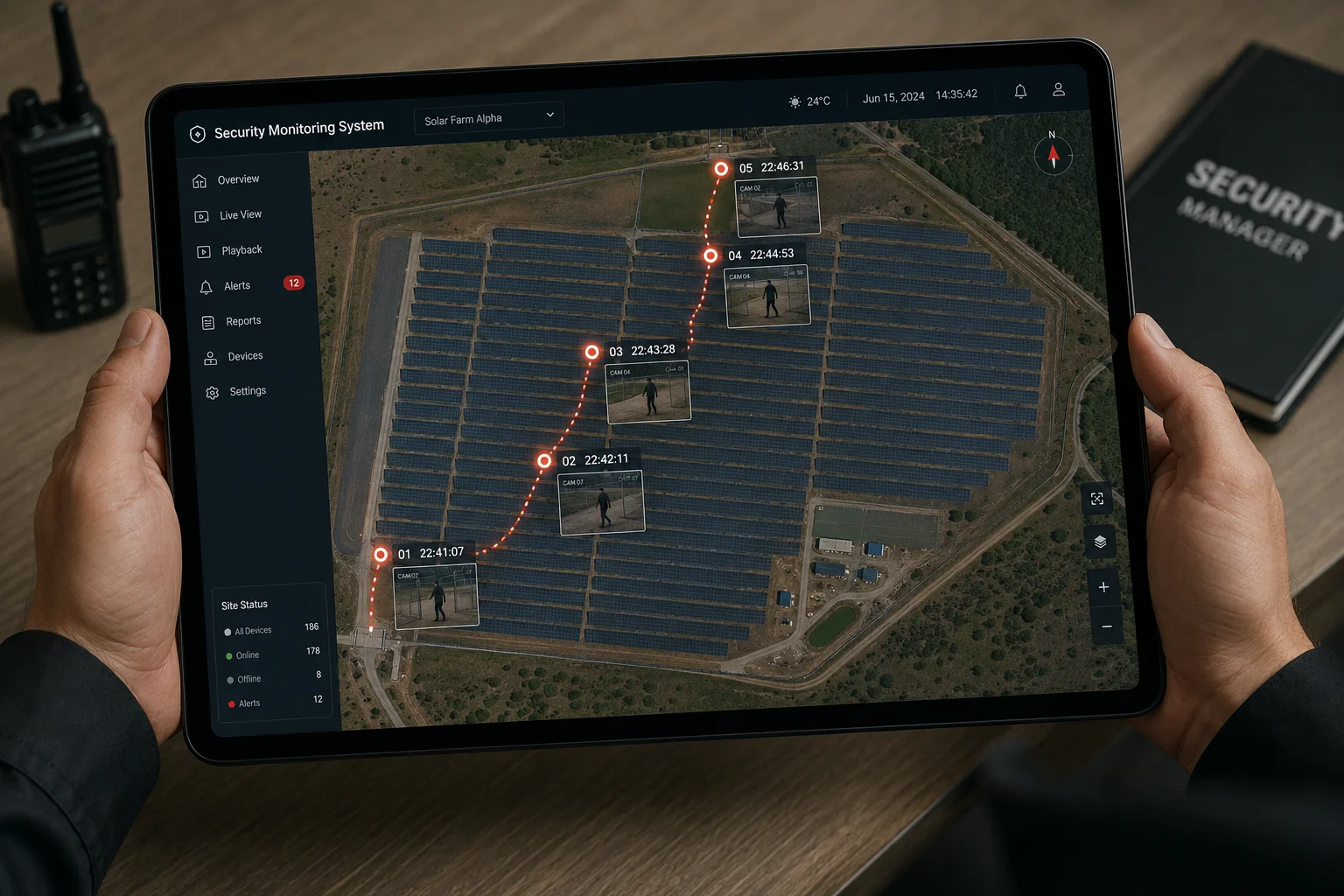
Sim, você pode ver um rastro. O aplicativo traça cada evento de detecção como um ponto com registro de data e hora em seu mapa do local. Quando conectados em sequência, esses pontos formam um caminho visual mostrando exatamente onde o intruso se moveu, quando se moveu e quais câmeras capturaram cada segmento.
 trilha de navegação caminho do intruso mapa do local
trilha de navegação caminho do intruso mapa do local
Como a Trilha de Navegação é Construída
Cada vez que uma câmera detecta o alvo rastreado, ela registra três coisas: posição mapeada por GPS, carimbo de data/hora e uma instantâneo. O aplicativo coleta esses registros e os desenha em seu mapa do local como uma série de pontos conectados.
Este não é um rastreador GPS em tempo real do intruso. É uma reconstrução baseada em eventos de detecção de câmera. A precisão depende de quantas câmeras você tem e quão bem elas cobrem o local. Mais câmeras significam mais pontos. Mais pontos significam uma trilha mais suave.
Que Dados Cada Navegação Contém
Cada ponto na trilha é clicável. Ao tocar em um ponto de navegação no aplicativo, você vê:
- O nome da câmera que o capturou
- A hora exata da detecção
- Um instantâneo ou clipe de vídeo curto
- A pontuação de confiança da correspondência de IA
Esta é uma evidência poderosa para as autoridades. Em vez de entregar à polícia 12 horas de filmagem bruta de 8 câmeras, você entrega a eles um mapa limpo com uma linha do tempo. Eles podem ver que o intruso entrou pela cerca norte às 02:14, passou pelo Edifício C às 02:17 e saiu pelo portão leste às 02:23.
Configuração Prática para Rastreamento de Navegação
| Etapa de Configuração | O Que Você Faz | Ferramenta Usada |
|---|---|---|
| 1. Carregar Mapa do Local | Importe uma imagem de satélite ou desenho CAD de sua propriedade | Software de aplicativo ou VMS |
| 2. Colocar Ícones de Câmera | Arraste cada câmera para sua posição no mundo real no mapa | Editor de mapa do aplicativo |
| 3. Definir Cones de Cobertura | Desenhe o ângulo do campo de visão para cada PTZ | Editor de mapa do aplicativo |
| 4. Habilitar Rastreamento por IA | Ative a detecção de humanos/veículos para todas as câmeras | Interface web da câmera |
| 5. Vincular Câmeras a um Grupo | Atribua todas as PTZs a um “grupo de rastreamento” | Configurações do VMS ou do aplicativo |
Limitações que você deve saber
A trilha de migalhas de pão tem lacunas se a cobertura da sua câmera tiver lacunas. Se houver um trecho de 50 metros entre duas câmeras sem sobreposição, a trilha mostrará um salto. O aplicativo desenha uma linha tracejada entre os dois pontos para indicar “caminho assumido” versus “caminho confirmado”. Para áreas críticas como pontos de entrada e zonas de alto valor, sempre recomendo cobertura sobreposta. Para corredores de baixo risco, uma lacuna é aceitável, desde que os pontos de entrada e saída estejam cobertos.
Nossas PTZs com zoom óptico de 38X e 40X ajudam a preencher lacunas sem adicionar mais câmeras. Uma única PTZ com zoom de 40X pode cobrir um corredor de 200 metros e ainda capturar detalhes em nível facial na extremidade distante. Isso significa menos câmeras, menos lacunas de migalhas de pão e menor custo de hardware para o seu projeto.
O Aplicativo Alternará Automaticamente para a Visualização ao Vivo da Câmera Mais Próxima Conforme o Alvo se Move?
Tive um distribuidor no Oriente Médio que me fez exatamente essa pergunta. Ele disse que seus operadores estavam perdendo tempo clicando manualmente entre os feeds das câmeras durante uma intrusão ativa.
Sim, o aplicativo pode alternar automaticamente a visualização ao vivo para a câmera mais próxima à medida que o alvo se move. Esse recurso, frequentemente chamado de “auto-follow” ou “modo de perseguição ao vivo”, mantém a tela do operador travada no alvo sem qualquer entrada manual. O sistema usa os dados de transferência de rastreamento para determinar qual câmera tem a melhor visão atual.
![]() alternância automática do aplicativo visualização ao vivo câmera PTZ mais próxima
alternância automática do aplicativo visualização ao vivo câmera PTZ mais próxima
Como a Alternância Automática Funciona na Prática
Quando você ativa o modo de perseguição ao vivo no aplicativo, o sistema faz três coisas simultaneamente:
Primeiro, ele mantém a PTZ da câmera atual travada no alvo usando rastreamento automático por IA. A câmera gira e inclina fisicamente para seguir a pessoa ou o veículo.
Segundo, ele monitora a posição do alvo em relação aos limites de cobertura. Quando o alvo se aproxima da borda, o sistema pré-carrega o fluxo da próxima câmera em segundo plano.
Terceiro, quando a transferência é acionada, o aplicativo alterna seu display principal para o feed da nova câmera. A transição leva cerca de 0,5 a 1,5 segundos, dependendo da velocidade da sua rede. Em uma LAN local com uma NVR5, é quase instantâneo. Em uma conexão 4G, espere um breve buffer.
Experiência do Operador vs. Modo Totalmente Automatizado
Existem duas maneiras de usar este recurso:
Modo semi-automático: O aplicativo exibe uma notificação pop-up dizendo “Alvo se movendo para a Câmera 3. Mudar visualização?”. O operador clica em sim ou não. Isso é bom para locais com muitos falsos positivos onde você deseja confirmação humana.
Modo totalmente automático: O aplicativo muda sem perguntar. O operador apenas observa. Isso é melhor para locais de alta segurança onde o tempo de resposta é mais importante do que a filtragem de alarmes falsos. Um operador treinado sempre pode substituir e selecionar manualmente uma câmera diferente se a troca automática escolher a errada.
Requisitos de Rede para Troca Automática Suave
Este recurso consome muita largura de banda porque você está transmitindo vídeo ao vivo de várias câmeras simultaneamente (a visualização atual mais o pré-buffer da próxima). Aqui está o que eu recomendo:
Para configurações de NVR conectadas à LAN, isso funciona imediatamente. Ethernet Gigabit lida com vários fluxos 4K sem problemas.
Para locais solares 4G, você precisa fazer concessões. Sugiro definir o fluxo de perseguição ao vivo para qualidade de sub-fluxo (resolução 720P ou até D1) durante a troca automática. Assim que o operador confirmar em qual câmera focar, ele pode mudá-la manualmente para o fluxo principal (4K). Isso mantém o uso de dados 4G sob controle, ao mesmo tempo que fornece consciência situacional em tempo real.
Nossas câmeras suportam saída de fluxo duplo especificamente por esse motivo. O fluxo principal é gravado localmente em 4K completo. O sub-fluxo vai via 4G para visualização remota. Você obtém o melhor dos dois mundos: qualidade total de evidência no cartão SD e monitoramento remoto responsivo via celular.
Este Recurso Requer um Servidor Central ou é Gerenciado via Sincronização P2P Câmera a Câmera?
Um integrador de sistemas na Europa me perguntou uma vez se ele precisava vender ao cliente um servidor de R$ 10.000 apenas para habilitar o rastreamento de várias câmeras. É uma pergunta justa porque a resposta muda todo o orçamento do projeto.
O rastreamento de várias câmeras geralmente requer um ponto de processamento central, mas nem sempre significa um servidor dedicado. Alguns sistemas usam um NVR com IA integrada como o cérebro central. Outros usam processamento baseado em nuvem. A sincronização P2P real de câmera para câmera para rastreamento é rara em produtos atuais porque a carga de computação de IA é muito pesada apenas para dispositivos de ponta.
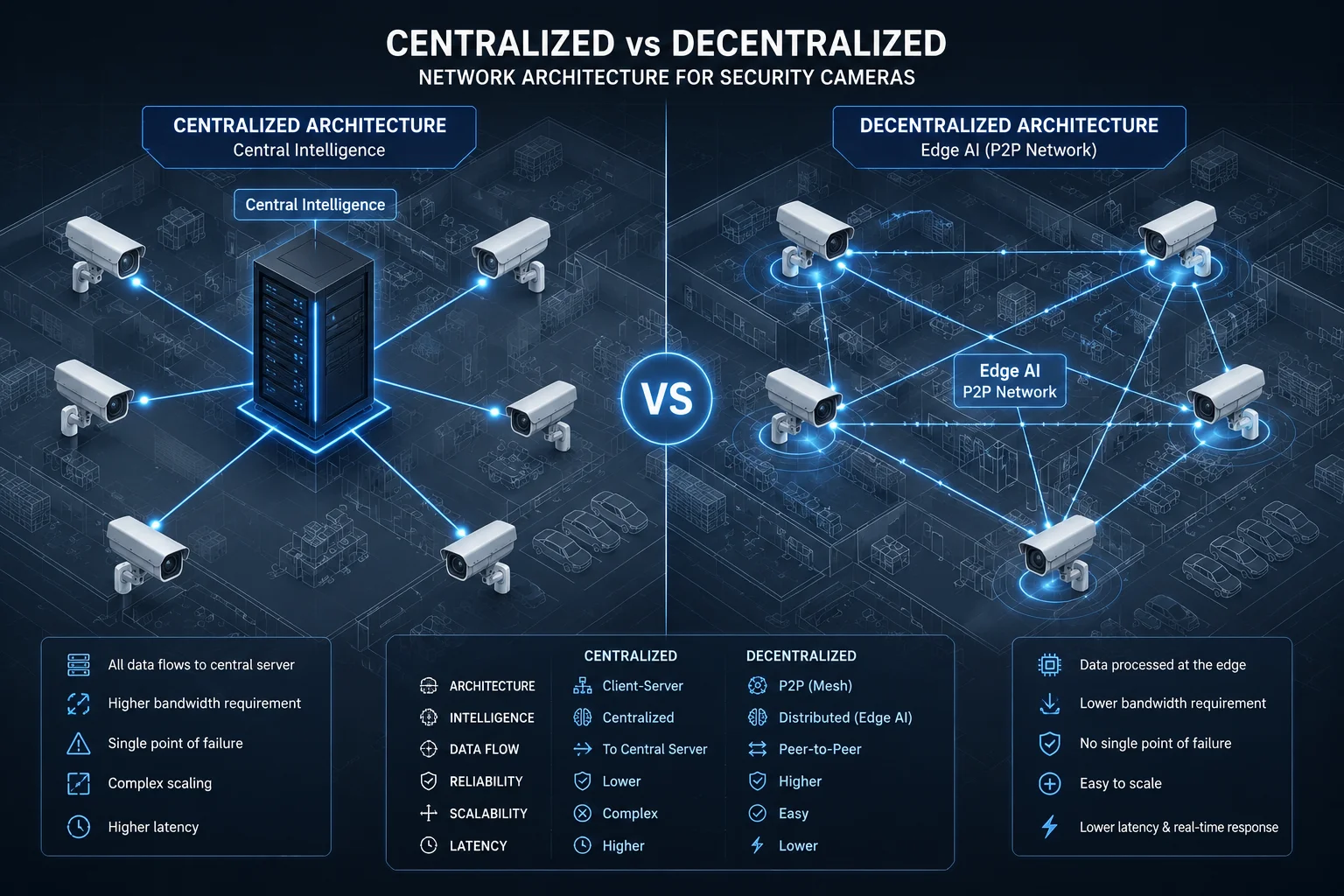 Servidor central vs. arquitetura de rastreamento de várias câmeras P2P
Servidor central vs. arquitetura de rastreamento de várias câmeras P2P
Entendendo as Três Opções de Arquitetura
Não há uma resposta única aqui. A escolha certa depende do tamanho do seu local, orçamento e condições de rede. Vou detalhar cada opção.
Opção 1: Servidor Central (NVR ou PC Dedicado)
Esta é a configuração mais comum para instalações profissionais. Um NVR ou um PC executando software VMS (como Milestone ou Blue Iris) recebe todos os fluxos de câmera. O servidor executa o mecanismo de IA Re-ID, gerencia as transferências e gera o rastro de migalhas de pão.
Prós: Mais confiável, menor latência para transferências, suporta o maior número de câmeras. Contras: Custo inicial mais alto, ponto único de falha se o servidor falhar, requer hardware no local.
Opção 2: Processamento Baseado na Nuvem
As câmeras enviam metadados de detecção (não vídeo completo) para um servidor na nuvem. A nuvem executa a correspondência Re-ID e envia comandos de transferência de volta para as câmeras. O rastro de migalhas vive no aplicativo da nuvem.
Prós: Nenhum servidor no local necessário, funciona bem para gerenciamento de vários locais, atualizações automáticas de software. Contras: Depende da conectividade com a internet, custo de assinatura contínuo, leve aumento de latência para transferências.
Opção 3: IA de Borda com Coordenação P2P
Esta é a abordagem mais recente e ainda em amadurecimento. Cada câmera tem seu próprio chip de IA poderoso o suficiente para executar Re-ID básico. As câmeras se comunicam diretamente umas com as outras pela rede local para coordenar transferências.
Prós: Nenhum servidor necessário, funciona em configurações totalmente off-grid, sem ponto único de falha. Contras: Limitado a pequenos grupos de câmeras (4-8 unidades), a precisão do Re-ID é menor do que a baseada em servidor, a complexidade do firmware aumenta.
Qual Arquitetura se Adapta a Qual Projeto?
| Tipo de projeto | Melhor Arquitetura | Razão |
|---|---|---|
| Grande local comercial (mais de 20 câmeras) | Servidor Central (NVR/VMS) | Necessita de poder de processamento para muitas trilhas simultâneas |
| Rede de varejo com vários locais | Baseado na Nuvem | Gerenciamento centralizado entre locais sem equipe de TI local |
| Canteiro de obras remoto (solar 4G) | IA de Borda com P2P | Sem internet confiável para a nuvem, sem energia para um servidor |
| Governo ou infraestrutura crítica | Servidor Central + Redundância | Requer a mais alta precisão e não pode tolerar dependência da nuvem |
O que Oferecemos em
Nossas câmeras de rastreamento com IA de lente dupla possuem IA de ponta6 chips que suportam transferência P2P básica entre 2-4 câmeras sem nenhum servidor. Para implantações maiores, nossas câmeras são totalmente ONVIF7 e RTSP8 compatíveis, integrando-se a qualquer plataforma VMS principal que suporte rastreamento multicanal.
Para nossos clientes de energia solar 4G em áreas remotas, geralmente recomendo uma abordagem híbrida. Use IA de ponta para rastreamento em tempo real no local e sincronize os dados da trilha de migração para o aplicativo na nuvem quando a largura de banda permitir. Dessa forma, o rastreamento funciona mesmo que o 4G caia temporariamente. O mapa e os dados da trilha são carregados assim que a conectividade retorna.
O ponto principal é este: você não precisa escolher uma arquitetura para sempre. Comece com IA de ponta para uma pequena implantação. Se o local crescer, adicione um NVR como o cérebro central. Nossas câmeras funcionam em ambos os modos sem alterações de firmware. Essa flexibilidade protege o investimento do seu cliente à medida que suas necessidades de segurança aumentam.
Verdadeiro Sincronização de câmera para câmera P2P9 para rastreamento é raro em produtos atuais porque a carga de computação de IA é muito pesada apenas para dispositivos de ponta.
Conclusão
Ligar várias PTZs para rastrear um único alvo em um mapa é alcançável hoje com a combinação certa de IA Re-ID, posicionamento adequado da câmera e uma arquitetura de processamento adequada. Se você escolher P2P baseado em servidor, nuvem ou ponta, dependerá das condições do seu local e do seu orçamento.
1. Visão geral das capacidades das câmeras PTZ e casos de uso típicos em segurança. ︎↩︎ 2. Define vetores de características como representações matemáticas de atributos de objetos em aprendizado de máquina. ︎↩︎ 3. Explica como as coordenadas GPS são usadas para localizar câmeras em um mapa. ︎↩︎ 4. Termo de aprendizado de máquina que define a probabilidade mínima para uma correspondência positiva na reidentificação. ︎↩︎ 5. Network Video Recorder – dispositivo central de armazenamento e processamento para câmeras IP. ︎↩︎ 6. Explica o processamento de IA de ponta em dispositivos como câmeras, permitindo rastreamento local sem servidores. ︎↩︎ 7. Padrão ONVIF para interoperabilidade de câmeras; relevante para integrar múltiplas câmeras PTZ. ︎↩︎ 8. Protocolo RTSP para streaming de vídeo de câmeras IP; importante para visualização ao vivo e transição. ︎↩︎ 9. Conceito de comunicação peer-to-peer aplicado à coordenação de câmeras para transições de rastreamento. ︎↩︎