
Ho visto i tassi di rilevamento dell'IA crollare da 98% a 60% su progetti reali. La causa principale era sempre la stessa: impostazioni errate del tempo di permanenza nel percorso di crociera del PTZ.
L'accuratezza del tempo di sosta nei percorsi di crociera controlla il numero di fotogrammi chiari e stabili che il motore dell'IA ottiene in ogni posizione preimpostata. Se il tempo di sosta è troppo breve, inizia troppo presto o cambia tra un ciclo e l'altro, l'IA mancherà i bersagli, creerà falsi negativi e fornirà risultati analitici inaffidabili per l'intero sito.
 Precisione del tempo di permanenza della telecamera PTZ Riconoscimento AI percorso di crociera
Precisione del tempo di permanenza della telecamera PTZ Riconoscimento AI percorso di crociera
Di seguito, illustro le esatte esigenze di temporizzazione, i metodi di sincronizzazione, i rischi di rilevamento di tempi di permanenza brevi e i trucchi di ottimizzazione che ogni integratore dovrebbe conoscere prima di implementare telecamere PTZ dotate di intelligenza artificiale.
Indice dei contenuti
Quanti secondi di tempo di permanenza sono necessari all'intelligenza artificiale per scansionare una nuova scena?
Ero solito impostare il tempo di permanenza a 2 secondi e poi mi chiedevo perché la mia IA continuasse a mancare metà dei bersagli. La matematica mi ha mostrato il perché.
La maggior parte degli algoritmi di IA ha bisogno di almeno 3-5 secondi di tempo di permanenza stabile ad ogni preselezione. I primi 0,5-1 secondi sono destinati alla stabilizzazione meccanica e alla messa a fuoco automatica. Il resto fornisce i fotogrammi chiari consecutivi di cui l'IA ha bisogno per un rilevamento e una conferma affidabili del bersaglio.
 Tempo di permanenza PTZ secondi necessari per la scansione della scena AI
Tempo di permanenza PTZ secondi necessari per la scansione della scena AI
Comprendere il budget di tempo per ciascuna preimpostazione
Quando una telecamera PTZ raggiunge una nuova posizione preimpostata, prima che l'intelligenza artificiale possa svolgere qualsiasi attività utile, devono accadere diverse cose. Innanzitutto, il motore si ferma. Ma il corpo della telecamera non si ferma all'istante. L'arresto improvviso provoca sempre qualche vibrazione fisica. Questa vibrazione può durare da 0,3 a 0,5 secondi nella maggior parte delle unità PTZ commerciali. Durante questo periodo, ogni fotogramma catturato dalla telecamera presenta una sfocatura del movimento. I modelli AI come YOLO 1 o qualsiasi rilevatore accelerato da TensorRT ha bisogno di bordi netti per trovare gli oggetti. I fotogrammi sfocati sono inutili.
Dopo che le vibrazioni si sono stabilizzate, entra in funzione il sistema di messa a fuoco automatica. Anche se veloce PDAF (messa a fuoco automatica a rilevamento di fase) 2 impiega circa 0,3-0,5 secondi per agganciare la scena. Finché la messa a fuoco non viene bloccata, l'immagine è morbida. L'intelligenza artificiale non può estrarre caratteristiche come la struttura del volto o i caratteri della targa da un'immagine morbida.
Solo dopo aver effettuato la stabilizzazione e la messa a fuoco, l'AI ottiene fotogrammi utilizzabili. Ecco come si suddivide il budget di tempo per ciascuna preimpostazione:
| Fase | Durata | Cosa succede | Usabilità dell'intelligenza artificiale |
|---|---|---|---|
| Stabilizzazione meccanica | 0,3-0,5 secondi | Il motore si ferma, le vibrazioni si attenuano | Le inquadrature sono sfocate |
| Blocco della messa a fuoco automatica | 0,3-0,5 secondi | L'obiettivo si adatta alla nuova profondità della scena | L'immagine è morbida |
| Finestra di acquisizione AI | 2-3 secondi | Flusso di fotogrammi chiaro e stabile verso l'IA | ✅ Valido per il rilevamento |
| Buffer / zona di ripetizione | 0,5-1 secondo | Gestisce il ritardo della rete o la ripetizione dell'algoritmo | ✅ Margine di sicurezza |
| Totale consigliato | 3-5 secondi | — | — |
Perché 2 secondi non sono quasi mai abbastanza
Parlo con integratori che impostano il tempo di sosta a 2 secondi perché vogliono coprire più preset in un singolo ciclo di crociera. La logica sembra valida: più soste significa più copertura. Ma la realtà è diversa.
Se il tempo di permanenza totale è di 2 secondi e la telecamera impiega 0,5 secondi per smorzare le vibrazioni e altri 0,5 secondi per la messa a fuoco automatica, l'IA ottiene solo 1 secondo di riprese chiare. A 15 FPS, si tratta di soli 15 fotogrammi. La maggior parte degli algoritmi di IA utilizza un metodo di votazione su più fotogrammi. Hanno bisogno di vedere un bersaglio in almeno 3 o 5 fotogrammi consecutivi prima di contrassegnarlo come “confermato”. Con soli 15 fotogrammi e possibili ostruzioni o cambiamenti di illuminazione, l'algoritmo spesso non riesce a completare il ciclo di rilevamento-inseguimento-conferma.
Il risultato è semplice. L'intelligenza artificiale vede qualcosa, ma non ha dati sufficienti per dire “sì, quella è una persona” o “sì, quello è un veicolo”. Quindi rimane in silenzio. E l'operatore non riceve mai l'allarme.
È possibile sincronizzare l'attivazione del rilevamento AI con l'arrivo della telecamera a una preimpostazione?
Una volta ho trascorso un'intera settimana a risolvere il problema dei mancati rilevamenti in un progetto di perimetro. L'intelligenza artificiale attivava la scansione prima ancora che la telecamera finisse di mettere a fuoco.
Sì, la sincronizzazione è possibile. Ma l'attivazione del rilevamento AI deve iniziare dopo che la fotocamera ha confermato la stabilizzazione meccanica e il blocco della messa a fuoco automatica. L'avvio della scansione AI quando viene inviato il comando di spostamento, anziché quando la telecamera segnala “posizione raggiunta e messa a fuoco”, è l'errore di integrazione più comune.
 L'innesco del rilevamento AI sincronizza l'arrivo della preimpostazione PTZ
L'innesco del rilevamento AI sincronizza l'arrivo della preimpostazione PTZ
La differenza tra “comando inviato” e “posizione confermata”.”
È qui che molti progetti falliscono. Nella maggior parte dei sistemi di controllo PTZ si verificano due eventi separati. Il primo evento è il “comando inviato”. È il momento in cui il controller dice alla telecamera di passare alla preselezione 5. Il secondo evento è “posizione confermata”. Il secondo evento è "posizione confermata". È il momento in cui la telecamera comunica di essere arrivata, di aver smesso di muoversi e di aver bloccato la messa a fuoco.
Il problema è che molte piattaforme NVR e VMS iniziano il conto alla rovescia del tempo di permanenza dal “comando inviato”. Ciò significa che l'orologio è già in funzione mentre la telecamera sta ancora ruotando. Quando la telecamera si ferma e mette a fuoco, una buona parte del tempo di permanenza è già trascorsa.
Consiglio sempre di verificare se il protocollo PTZ supporta un callback o un flag di stato “posizione raggiunta”. Profilo ONVIF S 3, supporta, ad esempio, le interrogazioni sullo stato della posizione preimpostata. Se il sistema è in grado di leggere questo flag, è possibile creare una semplice regola logica. La regola dice: “Non avviare la scansione AI finché la telecamera non conferma di essere nella posizione di destinazione e la messa a fuoco non è bloccata”.”
Come si confrontano i diversi metodi di sincronizzazione
Non tutti i sistemi PTZ offrono lo stesso livello di sincronizzazione. Ecco un confronto degli approcci più comuni che vedo sul campo:
| Metodo di sincronizzazione | Come funziona | Pro | Contro |
|---|---|---|---|
| A tempo (ritardo fisso) | Avvia la scansione AI X secondi dopo il comando di spostamento | Semplice da configurare | Non si adatta a tempi di spostamento variabili |
| Polling di stato ONVIF | Controlla il flag di stato preimpostato ogni 200 ms | Preciso per le telecamere supportate | Aggiunge un leggero sovraccarico di rete |
| Azionamento dell'encoder | L'AI si avvia quando il codificatore conferma la stabilità del video | Molto affidabile | Richiede l'integrazione a livello di encoder |
| Calibrazione manuale | L'operatore testa e imposta il ritardo per la preimpostazione | Funziona su qualsiasi sistema | Richiede tempo, non è scalabile |
Il mio approccio preferito
Per i progetti in cui utilizzo le nostre telecamere PTZ Loyalty-Secu, preferisco il metodo di attivazione dell'encoder. Le nostre telecamere segnalano un flag video stabile una volta che il motore si è fermato e il ciclo PDAF è stato completato. Questo flag passa attraverso i metadati del flusso RTSP. Il backend AI legge questo flag e avvia la finestra di rilevamento solo dopo averlo ricevuto. In questo modo, non spreco mai tempo di sosta su fotogrammi sfocati o non a fuoco. Ogni secondo di tempo di permanenza è un secondo produttivo per l'IA.
Se il VMS non supporta il parsing dei metadati, ricorro a un metodo di ritardo fisso. Ma aggiungo sempre un margine di sicurezza di 1 secondo al tempo di stabilizzazione misurato. È meglio perdere 1 secondo di copertura che perdere l'intero rilevamento con quella preimpostazione.
Un tempo di permanenza breve può far sì che la mia IA non riceva avvisi di rilevamento di persone o veicoli?
Ho ricevuto una telefonata da un cliente alle 2 di notte perché l'intelligenza artificiale perimetrale non aveva rilevato un intruso che attraversava un parcheggio. Il tempo di permanenza era impostato su 1,5 secondi.
Sì. Un tempo di permanenza breve causa direttamente mancati rilevamenti. Gli algoritmi di intelligenza artificiale utilizzano la votazione di più fotogrammi per confermare i bersagli. Se la telecamera si allontana prima che l'algoritmo abbia terminato il ciclo di rilevamento-traccia-conferma, il sistema produrrà falsi negativi. Le minacce reali attraversano la scena senza essere rilevate.
 breve tempo di sosta AI non ha rilevato il veicolo umano
breve tempo di sosta AI non ha rilevato il veicolo umano
Come funziona la votazione multi-frame
La maggior parte dei moderni sistemi di rilevamento dell'intelligenza artificiale non si basa su un singolo fotogramma. Un singolo fotogramma può contenere ombre, riflessi o forme strane che sembrano una persona ma non lo sono. Per evitare questi falsi allarmi, l'IA utilizza un metodo chiamato voto multi-frame.
Il processo funziona in questo modo. L'intelligenza artificiale esegue il suo modello di rilevamento sul fotogramma 1. Trova una forma che assomiglia a un essere umano con una confidenza di 72%. Non viene ancora emesso un avviso. Nel fotogramma 2, trova la stessa forma in una posizione simile con una confidenza di 78%. Nel fotogramma 3, 81%. Nel Frame 4, 85%. Dopo aver individuato il target in 3-5 fotogrammi consecutivi con una confidenza crescente o stabile, l'algoritmo lo contrassegna come “target confermato” e invia l'avviso.
Questo processo richiede tempo. A 15 FPS, cinque fotogrammi richiedono circa 0,33 secondi. Sembra una cosa veloce. Ma ricordate che questa è solo la fase di votazione. Prima di iniziare la votazione, l'algoritmo deve anche inizializzare il tracker, costruire una bounding box e confrontare il bersaglio con le sue classi modello. L'intero ciclo di rilevamento-tracciamento-conferma spesso richiede da 1 a 2 secondi di video pulito.
Che cosa succede quando si interrompe il ciclo?
Se il tempo di permanenza è di soli 1,5 secondi e i primi 0,8 secondi sono persi per la stabilizzazione e la messa a fuoco, l'IA ottiene solo 0,7 secondi di video pulito. Si tratta di circa 10 fotogrammi a 15 FPS. L'algoritmo inizia il rilevamento dal fotogramma 1. Al fotogramma 5, l'intelligenza artificiale si sta fidando del video. Al fotogramma 5, sta acquisendo fiducia. Al fotogramma 10 potrebbe essere vicino alla conferma. Ma poi la telecamera si sposta. Il bersaglio scompare dall'inquadratura. Il tracker perde l'oggetto. Il punteggio di fiducia si azzera.
L'IA non attiva mai l'allarme. L'obiettivo era lì. La telecamera lo ha visto. Ma l'algoritmo non ha avuto abbastanza tempo per dire “confermato”. Questo è un falso negativo. I falsi negativi sono molto più pericolosi dei falsi positivi. Un falso positivo è un fastidioso allarme extra. Un falso negativo è un'intrusione mancata.
L'impatto sui diversi compiti di rilevamento
Non tutte le attività di intelligenza artificiale hanno le stesse esigenze di tempistica. Il riconoscimento delle targhe (LPR) è più impegnativo del semplice rilevamento umano perché l'algoritmo deve leggere i singoli caratteri. Ecco una guida approssimativa basata sulla mia esperienza di progetto:
| Compito AI | Cornici trasparenti minime necessarie | Tempo di sosta minimo effettivo | Rischio se il tempo di permanenza è troppo breve |
|---|---|---|---|
| Rilevamento umano | 3-5 fotogrammi | 2-3 secondi | Mancati avvisi di intrusione |
| Rilevamento del veicolo | 3-5 fotogrammi | 2-3 secondi | Registri di ingresso dei veicoli mancanti |
| Riconoscimento delle targhe | 8-15 fotogrammi | 4-5 secondi | Caratteri della targa illeggibili |
| Riconoscimento dei volti | 10-20 fotogrammi | 5-7 secondi | Corrispondenza di identità fallita |
| Analisi comportamentale (bighellonaggio) | 30+ cornici | 5-10 secondi | Calcolo errato del tempo di permanenza |
Questa tabella chiarisce una cosa. Più dettagli l'IA deve estrarre, più tempo le serve. E questo tempo deve essere pulito, stabile e concentrato. Non ci sono scorciatoie.
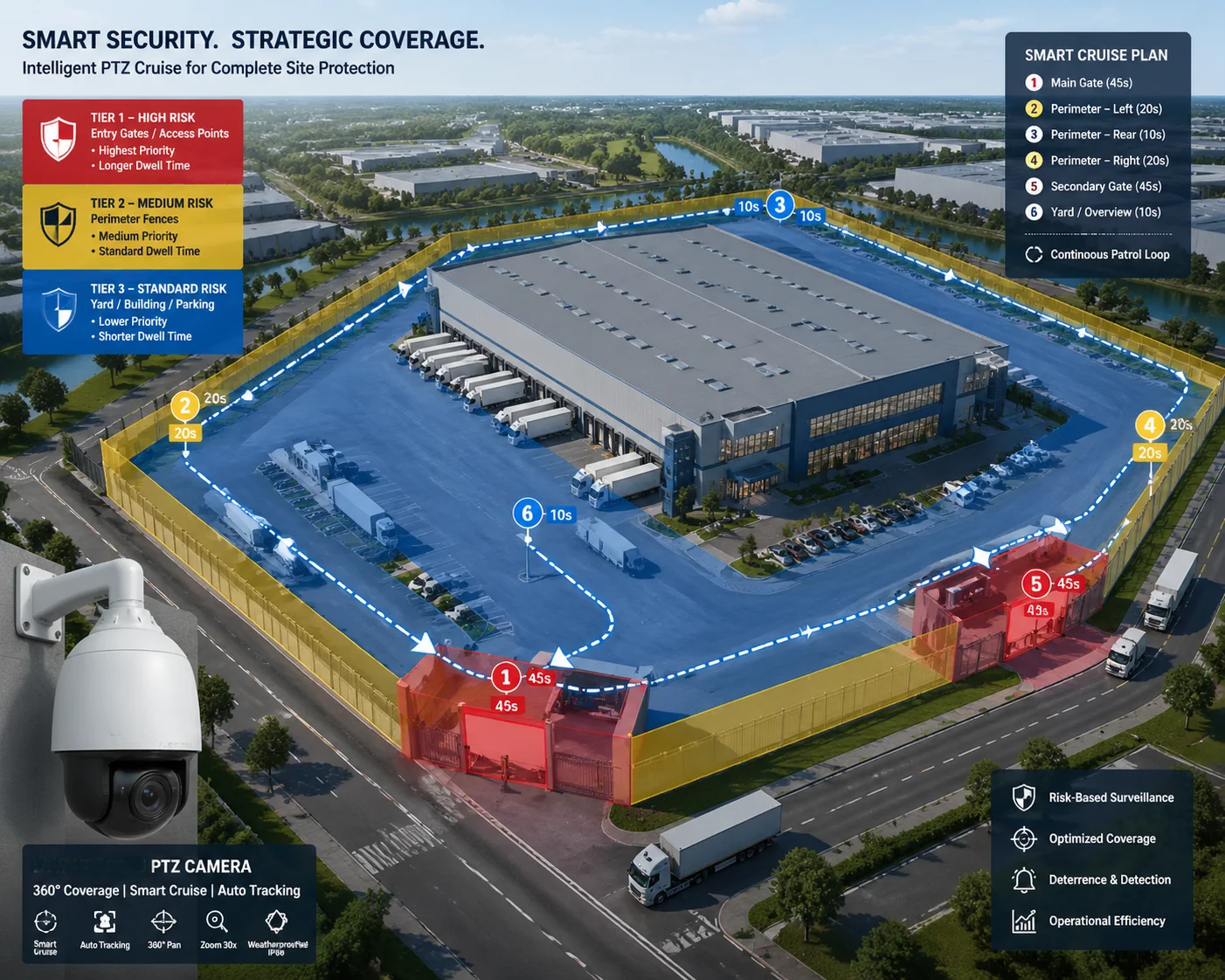
Come ottimizzare il programma di crociera per bilanciare l'area di copertura e la precisione dell'IA?
Lo dico sempre ai miei clienti: più preimpostazioni non significano maggiore sicurezza. A volte, un numero minore di arresti con tempi di permanenza più lunghi offre risultati reali di gran lunga migliori.
Per bilanciare l'area di copertura e l'accuratezza dell'IA, ridurre il numero di preset solo alle zone ad alta priorità, concedere a ogni sosta almeno 5 secondi di tempo di permanenza e seguire la regola dei 5 secondi: 1 secondo per la stabilizzazione, 3 secondi per l'acquisizione dell'IA e 1 secondo per il buffer contro i ritardi di rete o di elaborazione.
 ottimizzare il programma di crociera bilanciare la copertura e l'accuratezza dell'IA
ottimizzare il programma di crociera bilanciare la copertura e l'accuratezza dell'IA
La regola dei 5 secondi
Utilizzo un semplice schema per ogni percorso di crociera che configuro. La chiamo regola dei 5 secondi. Essa suddivide ogni periodo di sosta in tre fasi:
- Secondo 1: La fotocamera si assesta. Le vibrazioni del motore si arrestano. Il PDAF blocca la messa a fuoco. Qui non avviene alcun lavoro utile di AI.
- Secondi da 2 a 4: Questa è la finestra di acquisizione dell'IA principale. A 15 FPS, l'IA ottiene 45 fotogrammi puliti. È sufficiente per il rilevamento di persone, di veicoli e persino per l'LPR di base in condizioni di buona illuminazione.
- Secondo 5: Questa è la zona buffer. Gestisce la latenza di rete tra la telecamera e l'NVR, eventuali cicli di ripetizione dell'algoritmo e ritardi minori nella codifica.
Questa regola non è perfetta per tutti gli scenari. Per il riconoscimento dei volti o l'analisi comportamentale, estendo il tempo di permanenza a 7 o addirittura 10 secondi. Ma per la sicurezza perimetrale standard con rilevamento di persone e veicoli, 5 secondi per preselezione sono una solida base.
Priorità alle preimpostazioni in base al livello di rischio
Non tutte le aree di una struttura richiedono la stessa attenzione. Un cancello d'ingresso principale ha bisogno di più tempo di permanenza rispetto a una parete laterale tranquilla. Consiglio di suddividere tutte le posizioni preimpostate in tre livelli di priorità:
- Livello 1 (rischio elevato): Punti di ingresso, parcheggi, banchine di carico. Questi hanno un tempo di permanenza di 7-10 secondi.
- Livello 2 (rischio medio): Linee di recinzione, corridoi secondari, aree di stoccaggio. A questi vengono concessi 5 secondi.
- Livello 3 (rischio basso): Campi aperti senza risorse, aree decorative. Queste aree ricevono 3 secondi o vengono rimosse completamente dal percorso di crociera.
Riducendo il numero totale di preimpostazioni e dedicando più tempo a quelle importanti, il ciclo di crociera si completa più rapidamente e l'IA dispone di dati sufficienti in ogni punto critico. Ho visto questo approccio aumentare i tassi di rilevamento complessivi da 20% a 30% su siti che in precedenza utilizzavano 15 o più preset con tempi di permanenza di 2 secondi su tutta la linea.
Mantenere il tempo di sosta costante tra i cicli
Una cosa che controllo sempre è se il tempo di permanenza rimane invariato da un ciclo all'altro. Alcuni controllori PTZ più economici presentano una deriva della temporizzazione. Potrebbero mantenere una preimpostazione per 5 secondi al primo ciclo e per 3,2 secondi al successivo. Questa incoerenza interrompe le analisi dell'intelligenza artificiale che dipendono da regole basate sul tempo, come il rilevamento del tempo di permanenza o la misurazione del tempo di coda.
Se il vostro sistema PTZ mostra una deriva dei tempi, vi suggerisco di passare a un controller o a un NVR che utilizza una programmazione precisa basata su ONVIF. In alternativa, è possibile utilizzare le nostre telecamere PTZ Loyalty-Secu, che dispongono di un motore di crociera integrato con una coerenza del tempo di permanenza a livello di millisecondi. Questo elimina la dipendenza da un controller esterno e garantisce che ogni ciclo sia identico.
Anche la precisione del ritorno preimpostato è importante
Anche se il tempo di permanenza è perfetto, l'IA fallirà se la telecamera non torna ogni volta allo stesso identico angolo. Se la preimpostazione 5 punta a 45,0° al primo ciclo e a 45,3° al ciclo successivo, la zona di rilevamento virtuale disegnata nel VMS si sposterà nell'inquadratura. Gli oggetti che dovrebbero trovarsi all'interno della zona cadranno al di fuori di essa. La regola AI non si attiverà.
Le telecamere PTZ di alto livello offrono una precisione di ritorno preimpostata di ±0,1° o superiore. In questo modo l'inquadratura della scena rimane identica per centinaia di cicli. Le nostre telecamere Loyalty-Secu sono costruite secondo questo standard. La combinazione di un tempo di permanenza stabile e di un ritorno preciso della preimpostazione conferisce all'IA la coerenza necessaria per lavorare in modo affidabile, giorno dopo giorno.
Conclusione
La precisione del tempo di permanenza non è solo un'impostazione del PTZ. È la base che decide se i rilevamenti dell'IA sono affidabili o inutili. Se la tempistica è corretta, l'IA funziona. Se la sbagliate, pagherete per un sistema intelligente che agisce alla cieca.
1. Elaborazione multi-frame del rilevamento di oggetti in tempo reale YOLO. ︎↩︎ 2. Tempo di regolazione della messa a fuoco automatica a rilevamento di fase per le telecamere PTZ. ︎↩︎ 3. Interrogazione dello stato della posizione preimpostata del profilo S di ONVIF. ︎↩︎ 4. Votazione multi-frame per la riduzione dei falsi positivi nell'IA. ︎↩︎ 5. Tempo di smorzamento delle vibrazioni di stabilizzazione del motore per le teste PTZ. ︎↩︎ 6. Riconoscimento del volto tempo minimo di permanenza per l'estrazione delle caratteristiche. ︎↩︎ 7. Cornici di conferma dei caratteri di riconoscimento delle targhe. ︎↩︎ 8. Accuratezza del calcolo della finestra temporale di rilevamento del loitering. ︎↩︎ 9. Metadati ONVIF per la posizione PTZ e lo stato di messa a fuoco. ︎↩︎ 10. Tolleranza di precisione di ritorno preimpostata per le zone di rilevamento virtuali. ︎↩︎