
Je regarde chaque seconde car un retard peut transformer une petite alerte en une perte plus importante. J'ai besoin que le push soit rapide, clair et fiable.
Pour un système PTZ solaire 4G en Amérique du Nord, la latence du push cloud1 est généralement en moyenne de 2 à 5 secondes après une alarme de franchissement de ligne. La vitesse exacte dépend de la détection IA en périphérie2, de la qualité du signal 4G, de l'emplacement du cloud et de la rapidité avec laquelle le téléphone se réveille et affiche l'alerte.
 Latence du push cloud en Amérique du Nord, alarme de franchissement de ligne
Latence du push cloud en Amérique du Nord, alarme de franchissement de ligne
Je veux que les lecteurs voient que ce nombre n'est pas aléatoire. C'est le résultat de quelques courtes étapes qui se produisent les unes après les autres. Si je comprends chaque étape, je peux trouver le véritable goulot d'étranglement et améliorer l'ensemble du chemin d'alerte.
Table des matières
Le serveur P2P aux États-Unis (AWS/Azure) garantit-il des alertes inférieures à 2 secondes sur mon application mobile ?
Je sais pourquoi c'est important. Si je travaille avec un site distant, je ne veux pas d'un système “rapide” qui semble toujours lent lorsqu'une alarme se déclenche.
Un système basé aux États-Unis serveur P2P3 sur AWS4 ou Azure5 peut aider à réduire le délai, mais ne garantit pas des alertes inférieures à 2 secondes. La vitesse finale dépend toujours du temps de détection de la caméra, du temps de téléchargement 4G, des services de notification push mobiles et du temps de réveil du téléphone.
 Latence des alertes mobiles du serveur P2P américain
Latence des alertes mobiles du serveur P2P américain
Je dois être honnête sur le chemin. L'emplacement du serveur est important, mais ce n'est qu'une partie de la chaîne. Si la caméra est dans une zone de signal faible, le serveur peut être très proche et ne pas encore économiser le délai complet. Je sais aussi que APN Apple6 et FCM Google7 sont rapides, mais ce ne sont pas les seules sources de délai. La caméra doit d'abord détecter l'événement, empaqueter l'alarme et l'envoyer. Ensuite, le cloud doit la recevoir et la transmettre au système de notification push du téléphone. Après cela, le téléphone doit réveiller l'application et afficher l'alerte. Je traite le cloud comme un relais, pas comme une solution miracle. Lorsque je conçois un système pour l'Amérique du Nord, je me soucie de l'ensemble du chemin. Je me soucie également de la stabilité du réseau la nuit, sous la pluie ou dans de vastes zones agricoles. C'est là que se situe le véritable risque.
Comment l'intervalle “Heartbeat” du réseau 4G impacte-t-il la vitesse de la notification push initiale ?
J'ai vu de nombreux systèmes fonctionner correctement en laboratoire, puis ralentir sur le terrain. La raison est souvent simple. Le lien dort trop longtemps et la première alarme en paie le prix.
Un 4G plus court intervalle de battement de cœur8 aide généralement la première notification push à arriver plus rapidement car le modem maintient la connexion active. Si la connexion se met en veille ou se déconnecte, la première alerte peut nécessiter une nouvelle poignée de main, ce qui peut ajouter 1 à 2 secondes.
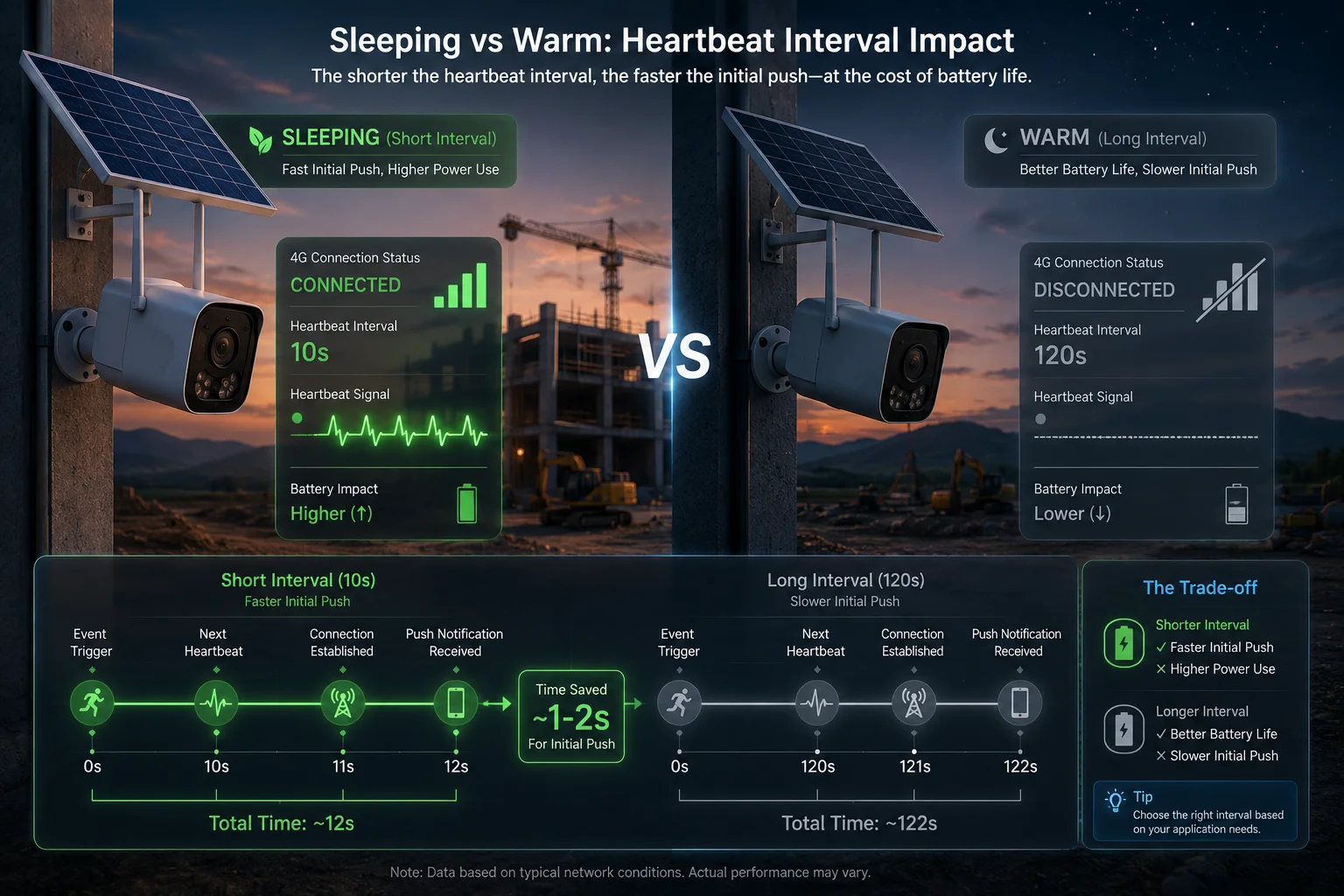 Vitesse d'alarme de l'intervalle de battement de cœur 4G
Vitesse d'alarme de l'intervalle de battement de cœur 4G
Je pense au battement de cœur comme à un petit signal de maintien. Il dit au réseau : “ Je suis toujours là. ” Lorsque je règle bien l'intervalle, le modem reste prêt et n'a pas besoin de tout reconstruire à partir de zéro lorsqu'une alarme démarre. Cela est très important dans les systèmes solaires, car les économies d'énergie sont toujours une préoccupation. Si je rends le battement de cœur trop court, je risque de gaspiller de la batterie. Si je le rends trop long, je risque de laisser le lien se refroidir. Je cherche donc un équilibre. J'examine également le comportement des opérateurs. Certains réseaux maintiennent mieux l'état que d'autres. Un signal propre dans une ville peut se comporter très différemment dans une zone rurale. J'ai appris que le battement de cœur n'est pas seulement un réglage technique. C'est aussi un outil de réglage sur le terrain. Il peut faire passer la première notification de “ à peine acceptable ” à “ suffisamment bonne pour agir ”. Pour des clients comme David Miller, cette différence peut façonner le résultat de l'ensemble du projet.
Battement de cœur, batterie et vitesse de la première alerte
| Réglage du battement de cœur | Effet sur la première alerte | Impact sur la batterie | Meilleur cas d'utilisation |
|---|---|---|---|
| Très court | Réveil plus rapide | Consommation plus élevée | Sites de sécurité critiques |
| Moyen | Vitesse équilibrée | Drainage modérée | La plupart des sites solaires |
| Très long | Première poussée plus lente | Drainage plus faible | Surveillance à faible risque |
Puis-je choisir de pousser une miniature basse résolution avant les métadonnées haute résolution pour accélérer l'alerte ?
J'aime cette idée car elle suit une règle simple : envoyer d'abord la plus petite chose utile. Cela peut rendre l'alerte beaucoup plus rapide.
Oui, je peux envoyer une miniature basse résolution11 ou une alerte textuelle d'abord, et envoyer des métadonnées haute résolution plus tard. Cela réduit la taille du premier paquet et peut aider l'utilisateur à voir l'alarme plus tôt, souvent dans la première seconde de livraison.
 Vitesse de l'alerte avec miniature basse résolution d'abord
Vitesse de l'alerte avec miniature basse résolution d'abord
Je pense généralement à cela comme une alerte en deux étapes. La première étape donne à l'utilisateur le signal. La deuxième étape donne à l'utilisateur le détail. Cette division peut être très judicieuse pour l'Amérique du Nord, où certains sites sont éloignés de la tour la plus proche ou utilisent un backhaul 4G faible. Si j'envoie l'image en premier, je risque de retarder l'avertissement juste pour attendre des octets qui ne sont pas encore nécessaires. Si j'envoie d'abord le texte, l'utilisateur peut agir plus rapidement. Ensuite, l'image peut suivre comme preuve. Je vois aussi un deuxième avantage. Les premiers messages plus petits sont moins susceptibles d'échouer sur des liaisons instables. Cela compte dans les fermes, les zones de construction et les sites frontaliers. Je n'ai pas besoin d'une qualité médiatique parfaite au premier moment. J'ai besoin d'un signal rapide et fiable. Plus tard, je peux livrer l'image complète, le clip ou les métadonnées. Cette méthode ne résout pas tous les problèmes de délai, mais elle améliore souvent l'expérience utilisateur d'une manière très réelle. Elle donne également aux intégrateurs un argument plus clair lorsqu'ils vendent un projet à un client qui se soucie du temps de réponse.
Ordre de la charge utile de l'alerte et rapidité pour l'utilisateur
| Ordre des alertes | Expérience utilisateur initiale | Charge réseau | Valeur pratique |
|---|---|---|---|
| Texte d'abord, image ensuite | Avis le plus rapide | Faible | Idéal pour les alarmes urgentes |
| Miniature d'abord, métadonnées ensuite | Indice visuel rapide | Faible à moyen | Idéal pour la révision sur mobile |
| Image complète d'abord | Notification plus lente | Plus élevé | Mieux pour la révision, pas pour la vitesse |
L'application donnera-t-elle la priorité aux “franchissements de ligne humains” par rapport aux événements de mouvement génériques pour un traitement plus rapide ?
Je préfère toujours un système qui sait ce qui compte le plus. Tous les événements ne méritent pas le même traitement, et toutes les alarmes ne devraient pas se battre pour la même file d'attente.
Oui, les événements de franchissement de ligne humaine devraient être prioritaires par rapport aux événements de mouvement génériques car ils sont plus significatifs et nécessitent généralement une action plus rapide. Une bonne application et un bon flux de travail dans le cloud peuvent envoyer ces alarmes avant les alertes de mouvement de faible valeur.
 Alerte prioritaire de franchissement de ligne humaine
Alerte prioritaire de franchissement de ligne humaine
Je vois cela comme un problème de filtrage avant qu'il ne devienne un problème de vitesse. Si un système cloud reçoit trop d'alertes de mouvement aléatoires, la file d'attente peut devenir bruyante. Ensuite, l'alarme importante peut attendre derrière une branche d'arbre, une ombre ou un animal en mouvement. Ce n'est pas suffisant pour un projet de sécurité sérieux. Je veux que le franchissement de ligne humaine passe au premier plan car cela me dit qu'une personne a franchi une limite qui m'importe déjà. C'est un signal plus fort que le mouvement générique. Je veux aussi que le modèle d'IA en périphérie fasse autant de travail que possible avant que le cloud n'intervienne. Si la caméra peut classifier l'événement tôt, le cloud peut le router avec plus de confiance. Cela peut réduire le trafic de notifications inutile et rendre l'application plus rapide. Pour les clients aux États-Unis, au Canada et en Europe, cela peut être encore plus important car ils gèrent souvent de nombreuses caméras dans un seul système. Une règle de priorité claire maintient l'utilité de l'application. Elle protège également l'utilisateur de la fatigue des alertes. Lorsque le système envoie la bonne alerte en premier, les gens lui font davantage confiance et ils réagissent plus rapidement.
Priorité des événements et réponse de l'application
| Type d'événement | Niveau de priorité | Valeur typique pour l'utilisateur | Impact sur la vitesse |
|---|---|---|---|
| Franchissement de ligne humaine | Haut | Très élevé | Traitement plus rapide |
| Franchissement de véhicule | Moyen | Haut | Rapide, mais secondaire |
| Mouvement générique | Faible | Faible | Peut être retardé ou filtré |
Qu'est-ce qui décide réellement de la latence du push cloud en Amérique du Nord ?
Je ne considère pas la latence comme un seul chiffre. Je la divise en parties, car chaque partie a un point faible différent.
1. Détection IA en périphérie
Je laisse d'abord la caméra décider de l'événement. Si le modèle IA est performant, la caméra peut marquer le passage rapidement et éviter les fausses alarmes. Si le modèle est faible, le cloud reçoit des données confuses et tout le processus ralentit.
2. Qualité de l'upload 4G
Je porte une grande attention à la force du signal, au comportement de l'opérateur et au temps de reconnexion. En Amérique du Nord, un site en ville et un site en zone rurale ne se comportent pas de la même manière. Un signal fort RSRP9 et SINR10 aide généralement l'alarme à se déclencher plus rapidement. Un lien faible signifie généralement des tentatives et des retards.
3. Vitesse de relais cloud
Je souhaite que le nœud cloud reste proche de la région cible. Un nœud américain sur AWS ou Azure aide à réduire la distance, mais il nécessite toujours un bon routage et des appels de service stables. Le cloud ne doit pas devenir un embouteillage.
4. Réveil par notification mobile
Je sais que le téléphone est son propre goulot d'étranglement. L'application doit se réveiller, lire le message et afficher l'alerte. Si le téléphone est en veille profonde ou si le système limite le travail en arrière-plan, la dernière étape peut s'étirer plus longtemps que prévu.
| Étape | Délai typique | Goulot d'étranglement principal |
|---|---|---|
| Détection IA en périphérie | 200 à 500 ms | Calcul IA |
| Upload 4G | 800 à 2500 ms | Qualité du signal |
| Relais cloud | 100 à 300 ms | Routage serveur |
| Réveil téléphonique | 500 à 1500 ms | Comportement de l'OS mobile |
J'utilise cette ventilation lorsque je parle aux intégrateurs de systèmes et aux distributeurs. Cela m'aide à expliquer pourquoi un site semble instantané tandis qu'un autre semble lent. Cela m'aide également à éviter les fausses promesses. Si je veux une meilleure vitesse, je dois améliorer le maillon le plus faible. Parfois, j'ajuste le battement de cœur. Parfois, je modifie la priorité des événements. Parfois, je divise la livraison du texte et des images. Parfois, je rapproche le cloud du marché utilisateur. Dans de nombreux projets réels, le meilleur résultat vient de la combinaison de toutes ces petites victoires, pas d'une seule grosse astuce.
Comment puis-je utiliser cela dans un projet réel en Amérique du Nord ?
J'utilise un ensemble de règles simples lorsque je conçois un projet pour un client comme David Miller. Je me concentre sur la vitesse, la confiance et la stabilité sur le terrain.
Ma configuration pratique
- Je laisse d'abord l'IA en périphérie classifier l'événement.
- J'envoie d'abord une alerte textuelle ou une miniature basse résolution.
- Je maintiens le modem 4G actif avec un battement de cœur équilibré.
- Je route le trafic cloud via un nœud nord-américain voisin.
- Je donne une priorité plus élevée au franchissement de ligne humain qu'au mouvement générique.
- Je teste le système en cas de signal faible, pas seulement en cas de signal fort.
J'aime cet ordre car il correspond à la vie réelle. Un chef de chantier ne se soucie pas de la théorie lorsqu'une ligne de clôture est franchie. Il se soucie de la première alerte utile. Il veut savoir ce qui s'est passé, où cela s'est passé et s'il doit réagir maintenant. C'est pourquoi je construis mes systèmes PTZ solaires 4G en pensant à l'utilisation sur le terrain. Je veux qu'ils fonctionnent en terrain découvert, par temps froid, sur de longues distances sans câble, et dans des endroits où une seconde de délai peut avoir de l'importance. Je veux également qu'ils conviennent aux acheteurs B2B qui ont besoin de travaux OEM ou ODM, de firmware en marque blanche et d'une compatibilité VMS stable. Si je peux garder le chemin d'alerte simple et rapide, je rends l'ensemble du produit plus facile à vendre, à installer et à prendre en charge.
Conclusion
Je traite la latence de poussée du cloud comme un problème de chaîne complète, et je le résous en améliorant l'étape la plus faible, pas en faisant confiance à un seul serveur ou à un seul réglage.
1. Comprendre le concept de latence de poussée et son impact sur les notifications en temps réel. ︎↩︎ 2. Découvrir comment l'IA sur caméra réduit les dépendances au cloud et accélère les alertes. ︎↩︎ 3. Voir comment les serveurs peer-to-peer simplifient l'accès à distance aux caméras. ︎↩︎ 4. Amazon Web Services fournit l'infrastructure cloud pour le relais P2P. ︎↩︎ 5. Microsoft Azure offre une autre option de région cloud pour l'Amérique du Nord. ︎↩︎ 6. Le service Apple Push Notification est utilisé pour la livraison des alertes iOS. ︎↩︎ 7. Firebase Cloud Messaging gère les notifications push Android. ︎↩︎ 8. Apprenez comment les signaux de maintien en vie affectent la préparation du modem et la durée de vie de la batterie. ︎↩︎ 9. La puissance reçue du signal de référence est une métrique clé pour la force du signal 4G. ︎↩︎ 10. Le rapport signal sur interférence plus bruit détermine la fiabilité des données. ︎↩︎ 11. Les petites charges utiles d'images réduisent le temps de livraison et améliorent l'expérience utilisateur. ︎↩︎