
Ich dachte früher, meine Solarkameras würden den ganzen Tag über gleich laufen. Dann bemerkte ich, dass das KI-Tracking um die Mittagszeit schärfer wurde – und ich musste herausfinden, warum.
Ja, industrielle 4G-Solar-PTZ-Kameras schalten in einen “Hochpräzisionsmodus“1 „, wenn Energie im Überfluss vorhanden ist. Dies basiert auf dem Echtzeit-Batterieladestand (SoC) und der eingehenden Sonnenenergie, die den Systemverbrauch übersteigt. Wenn beide Bedingungen erfüllt sind, schaltet die Firmware automatisch die volle Hardwareleistung frei.
 Solar-PTZ-Kamera Hochpräzisionsmodus während Spitzenzeiten
Solar-PTZ-Kamera Hochpräzisionsmodus während Spitzenzeiten
Unten erkläre ich genau, wie diese energieabhängige Leistungsskalierung funktioniert, was sie für Ihre Feldeinsätze bedeutet und wie Sie sie konfigurieren können, um die besten Ergebnisse von Ihrem Solarüberwachungssystem zu erzielen.
Inhaltsübersicht
Kann die KI ihre Bildrate und TOPS-Leistung erhöhen, wenn der Akku vollständig aufgeladen ist?
Ich habe einmal eine Solar-PTZ auf einer abgelegenen Ranch eingesetzt und mich gefragt, warum die KI um 6 Uhr morgens einen LKW verpasste, aber mittags jedes einzelne Fahrzeug erfasste. Die Antwort lag in der Batteriestandsanzeige.
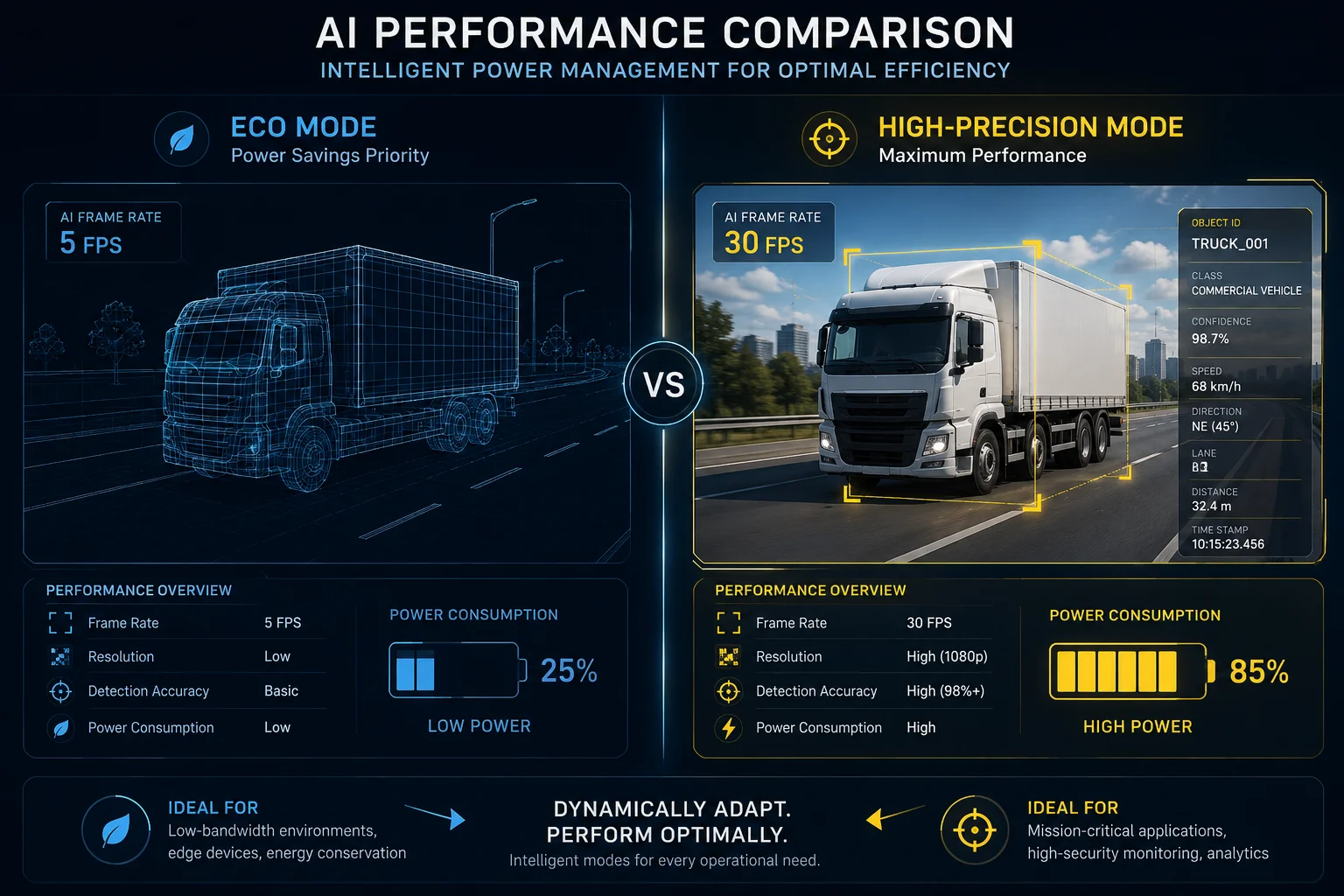
Ja. Wenn der Ladezustand des Akkus einen bestimmten Schwellenwert überschreitet (typischerweise 80 %), gibt die Firmware die volle NPU-Leistung frei. KI-Bildrate3 springt von 5 fps im Eco-Modus auf 30 fps, und tiefere Erkennungsmodelle werden aktiviert – was Ihnen die Erkennung von Fahrzeugmarken ermöglicht, nicht nur die grundlegende Person/Auto-Klassifizierung.
 KI-Bildratensteigerung Solar-Kamera voller Akku
KI-Bildratensteigerung Solar-Kamera voller Akku
Wie die Energie-Leistungs-Verbindung tatsächlich funktioniert
Das System verwendet keinen einfachen Timer. Es liest zwei Live-Datenpunkte aus dem BMS (Batteriemanagementsystem)6.
- Aktueller Batteriestand (SoC) – liegt er über 80 %?
- Echtzeit-Ladegeschwindigkeit — ist die eingehende Solarleistung höher als das, was das System gerade verbraucht?
Wenn beide Bedingungen erfüllt sind, sendet die Firmware einen Befehl an die NPU (Neural Processing Unit), ihren gedrosselten Zustand zu verlassen. Dies nennt die Industrie “Leistungs-Energie-Ausgleich“2.
Was sich auf der KI-Ebene ändert
Im Low-Power-Modus läuft der KI-Chip mit einem leichten Modell. Er kann eine Person von einem Auto unterscheiden, aber das ist auch schon alles. Im Hochpräzisionsmodus wird das vollständige Modell geladen. Hier ist, was das in der Praxis bedeutet:
| Parameter | Öko-Modus (geringe SoC) | Hochpräzisionsmodus (hohe SoC) |
|---|---|---|
| KI-Bildrate | 5 Bilder pro Sekunde | 30 Bilder pro Sekunde |
| Erkennungstiefe | Nur Person / Fahrzeug | Pose, Farbe, Marke, Verhalten |
| NPU-Auslastung | ~20% | ~95% |
| Fehlerrate bei der Erkennung (schnelle Ziele) | Hoch | Sehr gering |
Warum 30 Bilder pro Sekunde für die Verfolgung wichtig sind
Bei 5 Bildern pro Sekunde legt ein Fahrzeug, das sich mit 60 km/h bewegt, zwischen den Bildern etwa 3,3 Meter zurück. Die KI könnte das Ziel zwischen den Bildern verlieren, insbesondere bei einer PTZ-Schwenkbewegung. Bei 30 Bildern pro Sekunde verringert sich dieser Abstand auf 0,55 Meter. Der Tracker behält das Objekt im Visier, und der PTZ-Motor erhält glatte, kontinuierliche Korrekturbefehle anstelle von ruckartigen Sprüngen.
Die TOPS-Frage
TOPS (Tera-Operationen pro Sekunde)4 ist das rohe Rechenbudget der NPU. Im Eco-Modus ist der Chip getaktet – nur ein Bruchteil seiner Kerne ist aktiv. Wenn der Akku voll ist, erwachen alle Kerne. Ein Chip mit einer Bewertung von 8 TOPS liefert im Eco-Modus möglicherweise nur 1,5 TOPS. Dieser Unterschied erklärt, warum die tieferen Modelle (die mehr Rechenleistung benötigen) einfach nicht laufen können, wenn die Energie knapp ist. Das System ist nicht kaputt – es überlebt auf intelligente Weise.
Aktiviert die Kamera “360-Grad-KI-Patrouillen” nur, wenn reichlich Sonnenenergie vorhanden ist?
Ein Kunde fragte mich, warum seine PTZ an bewölkten Tagen keine vollständigen Patrouillenrunden mehr durchführte. Er dachte, der Motor sei kaputt. Das war nicht der Fall – die Firmware schützte den Akku.
In den meisten Konfigurationen, ja. Eine kontinuierliche 360-Grad-KI-Patrouille ist eine stromintensive Aktivität, da sie den Schwenkmotor, den Neigungsmotor und die KI-Engine gleichzeitig laufen lässt. Die Firmware erlaubt nur eine anhaltende Patrouille, wenn das Energiebudget bestätigt, dass dies ohne Risiko eines Herunterfahrens vor Einbruch der Dunkelheit möglich ist.
 Energiemanagement für 360-Grad-KI-Patrouillen-Solar-PTZ-Kameras
Energiemanagement für 360-Grad-KI-Patrouillen-Solar-PTZ-Kameras
Warum die volle Patrouille so stromhungrig ist
Eine PTZ-Patrouille ist nicht nur ein Drehen der Kamera. Während der Patrouille führt das System gleichzeitig drei Dinge aus:
- Schwenk-/Neigungsmotoren ziehen kontinuierlich Strom — Schrittmotoren benötigen Strom, um sich zu bewegen und ihre Position an jedem voreingestellten Punkt zu halten.
- KI verarbeitet jeden Frame — die NPU scannt auf Eindringlinge über den gesamten 360-Grad-Schwenkbereich.
- Videokodierung läuft mit voller Bitrate — da sich die Szene während der Drehung ständig ändert, kann der Encoder nicht effizient komprimieren. Bitrate steigt an.
Diese dreifache Last kann bei einem PTZ-System, das im Leerlauf 5–8 W verbraucht, 15–25 W ziehen. Bei einem 60-Wh-Akku könnte eine uneingeschränkte Patrouille die Reserve in wenigen Stunden aufbrauchen.
Der Entscheidungsbaum der Firmware
Der Patrouillenplaner prüft vor jedem Zyklus den Energiezustand:
- SoC > 85% und lädt → Patrouille mit voller Geschwindigkeit erlaubt. Alle voreingestellten Punkte werden angefahren. KI mit 30 fps.
- SoC 50–85% → Reduzierte Patrouille. Die Kamera fährt nur voreingestellte Prioritätspunkte an (z. B. Tor und Zaunlinie), überspringt Risikozonen mit geringer Priorität.
- SoC < 50% → Patrouille ausgesetzt. Kamera parkt an einer festen Position, die auf den Bereich mit dem höchsten Risiko ausgerichtet ist. KI wird auf nur durch Bewegung ausgelöst reduziert.
Wie Sie dies zu Ihrem Vorteil nutzen können
Intelligente Integratoren planen die Patrouille während des Energiespitzenfensters – typischerweise von 10:00 bis 14:00 Uhr im Sommer. Während dieses Fensters produziert das Solarpanel mehr Energie als das System benötigt, sodass die Patrouille “kostenlos” mit überschüssiger Energie läuft. Sie können dies in der Managementplattform als geplante Aufgabe konfigurieren:
- Patrouillenfenster: 11:00–13:00 täglich
- Fallback-Verhalten: Außerhalb dieses Fensters am Preset 1 (Haupttor) parken
- Überschreiben: Wenn SoC 95 % erreicht, einen zusätzlichen Patrouillenzyklus unabhängig von der Zeit zulassen
Dieser Ansatz gibt Ihnen volle Situationswahrnehmung während der Stunden mit der besten Beleuchtung (wenn Schatten am kürzesten und die KI-Genauigkeit am höchsten sind), während der Akku für nächtliche Benachrichtigungen geschont wird.
Zeigt die App an, wann sich die Kamera im “Boost-Modus” und wann im “Eco-Modus” befindet?
Ich erinnere mich, wie ich um 2 Uhr morgens auf mein Handy schaute und mich fragte, ob meine Kamera noch am Leben war oder nur Strom sparte. Ohne eine klare Statusanzeige rät man.
Ja, moderne Solar-PTZ-Management-Apps zeigen den aktuellen Betriebsmodus in Echtzeit an. Sie sehen normalerweise eine farbcodierte Markierung oder ein Symbol – grün für High-Precision/Boost, gelb für Balanced und rot für Ultra-Save. Die App zeigt auch den Akkustand, die Ladegeschwindigkeit und die geschätzte Laufzeit an, sodass Sie genau wissen, was die Kamera tut und warum.
 Solar-Kamera-App Boost-Modus Eco-Modus Statusanzeige
Solar-Kamera-App Boost-Modus Eco-Modus Statusanzeige
Was das App-Dashboard Ihnen sagt
Eine gut gestaltete Management-App gibt Ihnen auf einen Blick drei Informationsschichten:
Ebene 1: Aktuelle Modusanzeige
Dies ist normalerweise eine Markierung oben auf der Gerätekarte. Sie zeigt Ihnen den aktuellen Betriebszustand an. Die Benennung variiert je nach Firmware-Version, aber die Logik ist dieselbe:
| App-Anzeige | Interner Modus | Was es bedeutet |
|---|---|---|
| 🟢 Boost / Hohe Präzision | Volle Leistung | Alle KI-Funktionen aktiv, 30 fps, volle Patrouille |
| 🟡 Ausgewogen | Mittlere Leistung | 10 Bilder/Sek., Basis-Erkennung, eingeschränkte Patrouille |
| 🔴 Eco / Ultra-Spar | Überlebensmodus | KI ausgesetzt, PIR-Aufwachfunktion7 nur, Heartbeat-Kommunikation |
Ebene 2: Energiemetriken
Unter dem Modus-Badge sehen Sie:
- Akkukapazität (%) — aktueller Ladezustand
- Solareingang (W) — wie viel Strom das Panel gerade erzeugt
- Systemverbrauch (W) — wie viel die Kamera verbraucht
- Netto-Energiefluss — positiv bedeutet Aufladung, negativ bedeutet Entladung
- Geschätzte Laufzeit — wie viele Stunden der Akku bei aktuellem Verbrauch hält, wenn die Sonneneinstrahlung auf Null fällt
Ebene 3: Moduswechsel-Historie
Gute Apps protokollieren jeden Moduswechsel mit einem Zeitstempel. Das ist Gold wert für die Fehlerbehebung. Wenn sich ein Kunde über verpasste Erkennungen um 16 Uhr beschwert, können Sie das Protokoll überprüfen und sehen, dass die Kamera um 15:47 Uhr in den Eco-Modus gewechselt ist, weil eine Wolkenbank aufzog und die Akkukapazität unter den Schwellenwert fiel.
Warum dies für Ihr Unternehmen wichtig ist
Als Integrator müssen Sie Ihrem Endkunden beweisen, dass das System funktioniert. Eine klare Modusanzeige in der App bedeutet weniger Supportanrufe. Wenn ein Landwirt fragt: “Warum hat sie diesen Kojoten letzte Nacht nicht erwischt?”, können Sie die Historie aufrufen und zeigen: “Die Kamera befand sich zu diesem Zeitpunkt im Ultra-Save-Modus, da gestern bedeckt war. Wir müssen eine zweite Batterie oder ein größeres Panel für die Winterabdeckung hinzufügen.” Das ist ein datengesteuerter Upsell, kein Rätselraten.
Push-Benachrichtigungen für Moduswechsel
Die meisten Plattformen ermöglichen es Ihnen, Benachrichtigungen für Modusübergänge einzurichten. Ich empfehle, eine Push-Benachrichtigung zu aktivieren, wann immer das System von Boost auf Eco wechselt. Dies gibt Ihnen eine frühzeitige Warnung, dass das Energiebudget knapp ist – bevor die Kamera vollständig offline geht.
Wie viel besser ist die Zielverfolgungsgenauigkeit während des Spitzenleistungs-“Hochpräzisions”-Zustands?
Ich habe dies selbst auf einer Baustelle getestet. Dieselbe Kamera, dasselbe Ziel, dieselbe Entfernung – aber ein Test mittags und einer in der Dämmerung, als der Akku schwach war. Der Unterschied war nicht subtil.
Die Genauigkeit der Verfolgung verbessert sich dramatisch in Hochpräzisionsmodus8.
![]() Vergleich der Zielverfolgungsgenauigkeit: Hochpräzisionsmodus vs. Eco-Modus
Vergleich der Zielverfolgungsgenauigkeit: Hochpräzisionsmodus vs. Eco-Modus
Woher die Genauigkeitsgewinne kommen
Die Verbesserung ist nicht auf einen einzigen Faktor zurückzuführen. Es ist die Kombination mehrerer Systeme, die alle gleichzeitig mit voller Kapazität laufen:
Faktor 1: Bildrate und Vorhersage
Bei 30 Bildern pro Sekunde erhält der KI-Tracker 6-mal mehr Datenpunkte pro Sekunde als bei 5 Bildern pro Sekunde. Mehr Daten bedeuten eine bessere Bewegungsvorhersage. Der Algorithmus kann Geschwindigkeit, Richtung und Beschleunigung mit deutlich höherer Sicherheit berechnen. Wenn ein Ziel plötzlich die Richtung ändert, erfasst der 30-fps-Tracker dies innerhalb von 1–2 Bildern (33–66 ms). Der 5-fps-Tracker bemerkt dies möglicherweise erst nach 200 ms – bis dahin hat das Ziel den Bildausschnitt verlassen.
Faktor 2: Reaktionsgeschwindigkeit des Motors
Im Eco-Modus erhalten die Schrittmotoren einen reduzierten Strom, um Strom zu sparen. Dies macht sie langsamer beim Starten und langsamer beim Stoppen. Das Ergebnis ist ein Überschwingen – die Kamera schwenkt am Ziel vorbei und muss korrigieren. Im Boost-Modus bedeutet voller Strom:
- Schnellere Beschleunigung (die Kamera beginnt sich früher zu bewegen)
- Schnellere Verzögerung (die Kamera stoppt präzise auf dem Ziel)
- Weniger Oszillation (weniger Hin- und Her-Korrekturen)
Faktor 3: Schwellenwert für Erkennungskonfidenz
Im Eco-Modus verwendet die KI ein leichtgewichtiges Modell mit niedrigeren Konfidenzwerten. Um Fehlalarme zu vermeiden, legt das System einen hohen Konfidenzschwellenwert fest – das bedeutet, es ignoriert alles, wovon es nicht sehr sicher ist. Dies führt zu verpassten Erkennungen. Im Boost-Modus liefert das vollständige Modell von Natur aus höhere Konfidenzwerte, sodass der Schwellenwert gleich bleiben kann, während mehr echte Ziele erfasst werden.
Leistungsvergleich in der realen Welt
| Metrisch | Öko-Modus (geringe SoC) | Hochpräzisionsmodus (hohe SoC) |
|---|---|---|
| Erfolgsrate der Zielverriegelung | ~60% | >95% |
| Durchschnittliche Zeit bis zum Lock (ab Erkennung) | 800 ms | 200 ms |
| PTZ-Überschwinghäufigkeit | 1 von 3 Bewegungen | 1 von 15 Bewegungen |
| Max. verfolgbare Zielgeschwindigkeit | ~30 km/h | ~80 km/h |
| Wiedererfassung nach Verdeckung | Schlägt oft fehl | Gelingt ~90% der Zeit |
Was dies für Ihre Projekte bedeutet
Wenn Sie Kameras auf einer Autobahnüberführung oder am Eingang einer Baustelle einsetzen, wo sich Fahrzeuge schnell bewegen, ist der Unterschied zwischen Eco- und Boost-Modus der Unterschied zwischen einem nützlichen und einem nutzlosen System. Deshalb sage ich Integratoren immer: dimensionieren Sie Ihr Solarpanel und Ihren Akku für die schlechteste Jahreszeit, nicht für die beste. Sie möchten, dass Ihre Kameras so viele Stunden pro Tag wie möglich im Boost-Modus laufen – insbesondere während der Stunden, die für die Sicherheitsbedürfnisse Ihres Kunden am wichtigsten sind.
Ein praktischer Tipp
Für Standorte, an denen die Spitzenbedrohungsstunden mit den Spitzen-Solarstunden übereinstimmen (wie Diebstahl auf Baustellen am Tag), haben Sie Glück – das System leistet von Natur aus am besten, wenn Sie es am dringendsten benötigen. Für Standorte, an denen die Bedrohungen nachts ihren Höhepunkt erreichen (wie Einbrüche auf ländlichen Anwesen), müssen Sie sicherstellen, dass der Tagesüberschuss an Sonnenenergie den Akku vollständig auflädt, damit das System die Nacht im ausgewogenen Modus durchlaufen kann, anstatt vor Sonnenaufgang in den Ultra-Sparmodus zu wechseln.
Schlussfolgerung
Solar-PTZ-Kameras werden bei starker Sonneneinstrahlung intelligenter und schneller – aber es ist der Akkustand, nicht die Uhr, der den Auslöser betätigt. Dimensionieren Sie Ihr Stromsystem richtig, und Ihre KI läuft mit voller Stärke genau dann, wenn es darauf ankommt.
1. Erfahren Sie, wie der Hochpräzisionsmodus die volle KI- und Motorleistung freischaltet, wenn Energie reichlich vorhanden ist. ︎↩︎ 2. Dies bezieht sich auf die Firmware-Strategie, die den KI-Durchsatz basierend auf der verfügbaren Energie anpasst. ︎↩︎ 3. Die Bildrate beeinflusst direkt die Glätte und Genauigkeit der KI-Verfolgung. ︎↩︎ 4. TOPS misst die rohe Rechenleistung eines NPU, die für die Ausführung komplexer KI-Modelle entscheidend ist. ︎↩︎ 5. Die kontinuierliche 360°-Patrouille kombiniert Motorbewegung mit KI-Analysen und verbraucht erhebliche Energie. ︎↩︎ 6. Das BMS überwacht SoC und Ladegeschwindigkeit und liefert Daten, die Moduswechsel auslösen. ︎↩︎ 7. Passive Infrarotsensoren lösen die Kamera aus, um bei Bewegungsereignissen aus dem Tiefschlaf zu erwachen. ︎↩︎ 8. Genauigkeitsmetriken wie die Erfolgsrate beim Sperren und die Wiedererfassung nach Okklusion definieren die Systemzuverlässigkeit. ︎↩︎