
اعتدت أن أعتقد أن كاميراتي الشمسية تعمل بنفس الطريقة طوال اليوم. ثم لاحظت أن تتبع الذكاء الاصطناعي أصبح أكثر حدة حول منتصف النهار - وكان عليّ معرفة السبب.
نعم، كاميرات PTZ الشمسية الصناعية من الجيل الرابع 4G تتحول إلى “وضع الدقة العالية“1 " عندما تكون الطاقة وفيرة. يعتمد ذلك على مستوى شحن البطارية في الوقت الفعلي (SoC) وطاقة الشمس الواردة التي تتجاوز سحب النظام. عندما يتم استيفاء كلا الشرطين، يقوم البرنامج الثابت بإلغاء قفل الأداء الكامل للأجهزة تلقائيًا.
 وضع الدقة العالية لكاميرا PTZ الشمسية خلال ساعات الذروة
وضع الدقة العالية لكاميرا PTZ الشمسية خلال ساعات الذروة
أدناه، سأشرح بالتفصيل كيف يعمل هذا التوسع في الأداء المرتبط بالطاقة، وماذا يعني ذلك لعملياتك الميدانية، وكيف يمكنك تكوينه للحصول على أفضل النتائج من نظام المراقبة بالطاقة الشمسية الخاص بك.
جدول المحتويات
هل يمكن للذكاء الاصطناعي زيادة معدل الإطارات وأداء TOPS عندما تكون البطارية مشحونة بالكامل؟
لقد قمت ذات مرة بنشر كاميرا PTZ شمسية في مزرعة نائية وتساءلت لماذا فات الذكاء الاصطناعي شاحنة في الساعة 6 صباحًا ولكنه التقط كل مركبة في الظهيرة. كانت الإجابة في مقياس البطارية.
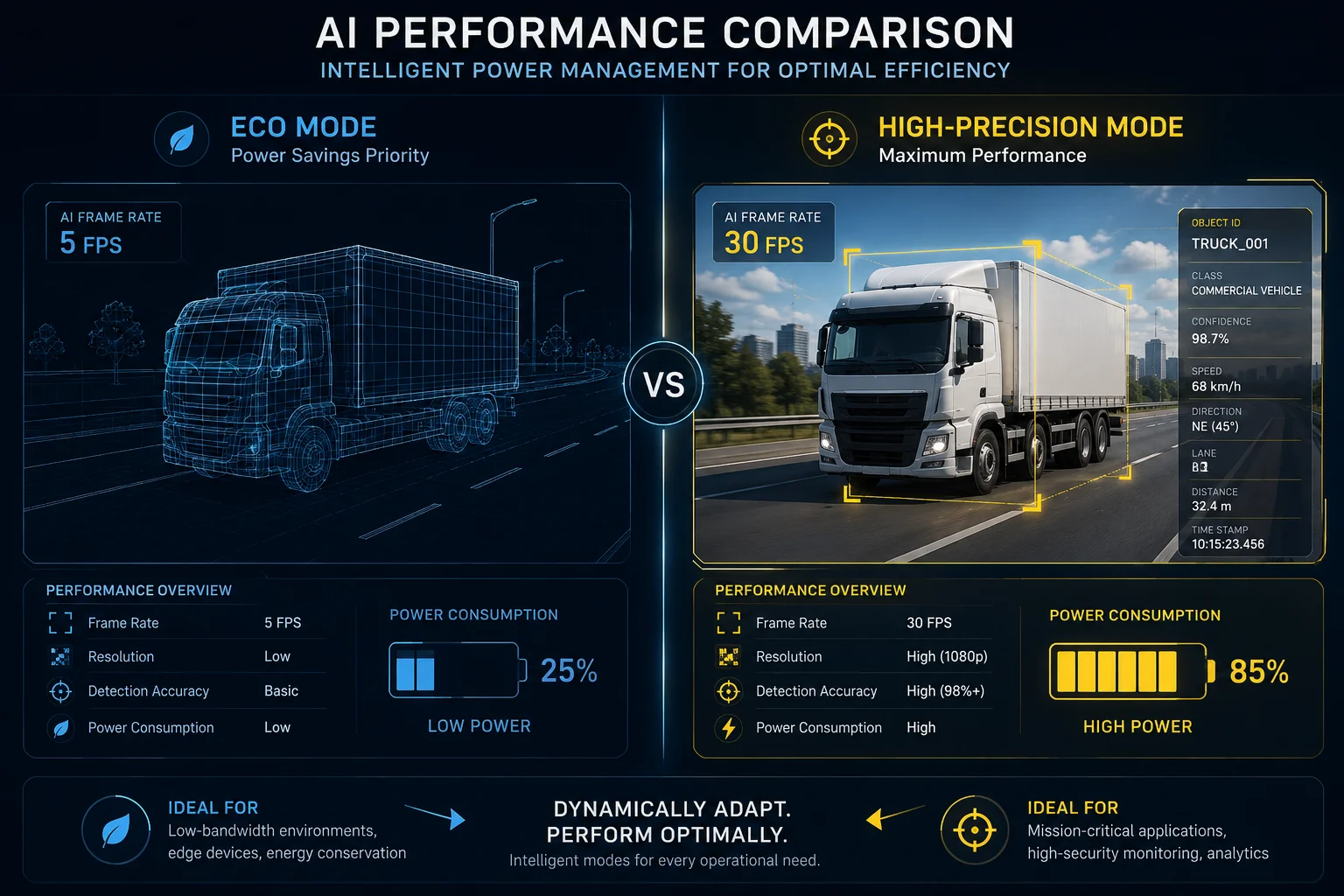
نعم. عندما يرتفع شحن البطارية فوق حد معين (عادةً 80٪)، يقوم البرنامج الثابت بإطلاق الطاقة الكاملة لوحدة المعالجة العصبية (NPU). معدل إطارات الذكاء الاصطناعي3 يقفز من 5 إطارات في الثانية في الوضع الاقتصادي إلى 30 إطارًا في الثانية، وتنشط نماذج التعرف الأعمق - مما يمنحك اكتشاف ماركة المركبات، وليس مجرد تصنيف أساسي للأشخاص/السيارات.
 زيادة معدل إطارات الذكاء الاصطناعي للكاميرا الشمسية ببطارية كاملة
زيادة معدل إطارات الذكاء الاصطناعي للكاميرا الشمسية ببطارية كاملة
كيف يعمل الارتباط بين الطاقة والأداء فعليًا
لا يستخدم النظام مؤقتًا بسيطًا. يقرأ نقطتي بيانات مباشرتين من نظام إدارة البطارية (BMS)6.
- شحن البطارية الحالي (SoC) - هل هو فوق 80٪؟
- معدل الشحن في الوقت الفعلي — هل طاقة الطاقة الشمسية الواردة أعلى مما يستهلكه النظام حاليًا؟
عندما يكون كلا الشرطين صحيحين، يرسل البرنامج الثابت أمرًا إلى وحدة المعالجة العصبية (NPU) للخروج من حالتها المخففة. هذا ما تسميه الصناعة “موازنة الأداء والطاقة“2.
ما الذي يتغير على مستوى الذكاء الاصطناعي
في وضع الطاقة المنخفضة، تشغل شريحة الذكاء الاصطناعي نموذجًا خفيف الوزن. يمكنها التمييز بين شخص وسيارة، ولكن هذا كل شيء. في وضع الدقة العالية، يتم تحميل النموذج الكامل. إليك ما يعنيه ذلك عمليًا:
| المعلمة | الوضع البيئي (انخفاض SoC) | وضع الدقة العالية (ارتفاع SoC) |
|---|---|---|
| معدل إطارات الذكاء الاصطناعي | 5 إطارات في الثانية | 30 إطارًا في الثانية |
| عمق التعرف | شخص / مركبة فقط | الوضع، اللون، العلامة التجارية، السلوك |
| استخدام وحدة المعالجة العصبية | ~20% | ~95% |
| معدل الاكتشاف الفائت (الأهداف السريعة) | عالية | منخفض جدًا |
لماذا 30 إطارًا في الثانية مهمة للتتبع
عند 5 إطارات في الثانية، تقطع مركبة تتحرك بسرعة 60 كم/ساعة حوالي 3.3 أمتار بين الإطارات. قد تفقد وحدة الذكاء الاصطناعي الهدف بين الإطارات، خاصة أثناء دوران PTZ. عند 30 إطارًا في الثانية، يتقلص هذا الفارق إلى 0.55 متر. يحتفظ المتتبع بقفل على الكائن، وتتلقى محرك PTZ أوامر تصحيح سلسة ومستمرة بدلاً من القفزات المفاجئة.
مسألة TOPS
TOPS (تيرا عملية في الثانية)4 هي ميزانية الحوسبة الخام لوحدة المعالجة العصبية. في الوضع البيئي، يتم تقييد ساعة الشريحة - يتم تنشيط جزء فقط من نوى المعالج. عندما تكون البطارية ممتلئة، تستيقظ جميع النوى. قد تقدم شريحة مصنفة بـ 8 TOPS 1.5 TOPS فقط في الوضع البيئي. هذا الفرق هو سبب عدم إمكانية تشغيل النماذج الأعمق (التي تحتاج إلى المزيد من الحوسبة) ببساطة عندما تكون الطاقة شحيحة. النظام ليس معطلاً - إنه يتصرف بذكاء للبقاء على قيد الحياة.
هل تتيح الكاميرا “الدوريات الذكية بزاوية 360 درجة” فقط عندما تكون طاقة الشمس وفيرة؟
سألني أحد العملاء لماذا توقفت كاميرا PTZ الخاصة به عن القيام بدوريات كاملة في الأيام الغائمة. اعتقد أن المحرك كان معطلاً. لم يكن كذلك - كان البرنامج الثابت يحمي البطارية.
في معظم التكوينات، نعم. الدورية المستمرة بالذكاء الاصطناعي بزاوية 360 درجة هي نشاط يستهلك الكثير من الطاقة لأنها تبقي محرك التحريك الأفقي، ومحرك التحريك الرأسي، ومحرك الذكاء الاصطناعي قيد التشغيل في وقت واحد. سيسمح البرنامج الثابت بالدورية المستمرة فقط عندما تؤكد ميزانية الطاقة أنه يمكن القيام بذلك دون المخاطرة بالإغلاق قبل حلول الليل.
 إدارة طاقة كاميرا PTZ الشمسية بدورية الذكاء الاصطناعي بزاوية 360 درجة
إدارة طاقة كاميرا PTZ الشمسية بدورية الذكاء الاصطناعي بزاوية 360 درجة
لماذا الدورية الكاملة تستهلك الكثير من الطاقة
الدورية بكاميرا PTZ ليست مجرد تدوير للكاميرا. أثناء الدورية، يقوم النظام بثلاثة أشياء في وقت واحد:
- محركات التحريك الأفقي/الرأسي تسحب التيار باستمرار — تحتاج المحركات الخطوية إلى طاقة للحركة وللحفاظ على الموضع عند كل نقطة محددة مسبقًا.
- الذكاء الاصطناعي يعالج كل إطار — يقوم معالج الشبكة العصبية بالمسح بحثًا عن التعديات عبر نطاق 360 درجة بالكامل.
- تشفير الفيديو يعمل بكامل معدل البت — نظرًا لأن المشهد يتغير باستمرار أثناء الدوران، لا يمكن للمُشفّر ضغط البيانات بكفاءة. معدل البت يرتفع.
يمكن لهذا الحمل الثلاثي أن يسحب 15-25 واط في نظام PTZ الذي يكون في وضع الخمول عند 5-8 واط. على بطارية بسعة 60 واط في الساعة، يمكن للدورية غير المقيدة أن تستنزف الاحتياطي في غضون ساعات قليلة.
شجرة قرارات البرنامج الثابت
يقوم مجدول الدورية بفحص حالة الطاقة قبل كل دورة:
- SoC > 85% ويتم الشحن → دورية كاملة السرعة مسموح بها. زيارة جميع النقاط المحددة مسبقًا. الذكاء الاصطناعي بسرعة 30 إطارًا في الثانية.
- نظام على شريحة 50–85% → دورية مخفضة. تزور الكاميرا فقط النقاط ذات الأولوية (مثل البوابة وخط السياج)، وتتخطى المناطق ذات المخاطر المنخفضة.
- نظام على شريحة < 50% → تم تعليق الدورية. تركن الكاميرا في موضع ثابت يواجه المنطقة الأكثر خطورة. ينخفض الذكاء الاصطناعي إلى التشغيل عند اكتشاف الحركة فقط.
كيفية استخدام هذا لصالحك
يقوم المدمجون الأذكياء بجدولة الدورية خلال نافذة ذروة الطاقة — عادةً من 10:00 صباحًا إلى 2:00 مساءً في الصيف. خلال هذه النافذة، ينتج اللوح الشمسي طاقة أكثر من حاجة النظام، لذا تعمل الدورية “مجانًا” على الطاقة الفائضة. يمكنك تكوين ذلك في منصة الإدارة كمهمة مجدولة:
- نافذة الدورية: 11:00–13:00 يوميًا
- سلوك الرجوع للخلف: اركن عند الإعداد المسبق 1 (البوابة الرئيسية) خارج هذه النافذة
- تجاوز: إذا وصل مستوى شحن البطارية إلى 95%، اسمح بدورة دورية إضافية بغض النظر عن الوقت
يمنحك هذا النهج وعيًا كاملاً بالوضع خلال أفضل ساعات الإضاءة (عندما تكون الظلال أقصر ودقة الذكاء الاصطناعي أعلى) مع الحفاظ على البطارية لتنبيهات الليل.
هل يعرض التطبيق متى تكون الكاميرا في “وضع التعزيز” مقابل “الوضع الاقتصادي”؟
أتذكر أنني كنت أتفقد هاتفي في الساعة 2 صباحًا متسائلاً عما إذا كانت كاميرتي لا تزال تعمل أم أنها توفر الطاقة فقط. بدون مؤشر حالة واضح، فأنت تخمن.
نعم، تعرض تطبيقات إدارة الكاميرات الشمسية الحديثة وضع التشغيل الحالي في الوقت الفعلي. سترى عادةً شارة أو أيقونة مرمزة بالألوان — أخضر لوضع الدقة العالية/التعزيز، وأصفر لوضع التوازن، وأحمر لوضع توفير الطاقة الفائق. يعرض التطبيق أيضًا نسبة البطارية ومعدل الشحن ووقت التشغيل المقدر حتى تعرف بالضبط ما تفعله الكاميرا ولماذا.
 تطبيق الكاميرا الشمسية وضع التعزيز وضع اقتصادي عرض الحالة
تطبيق الكاميرا الشمسية وضع التعزيز وضع اقتصادي عرض الحالة
ما يخبرك به لوحة معلومات التطبيق
يمنحك تطبيق الإدارة المصمم جيدًا ثلاث طبقات من المعلومات بنظرة واحدة:
الطبقة 1: مؤشر الوضع الحالي
هذه عادةً شارة في الجزء العلوي من بطاقة الجهاز. تخبرك بحالة التشغيل الآن. يختلف الاسم حسب إصدار البرنامج الثابت، ولكن المنطق هو نفسه:
| عرض التطبيق | الوضع الداخلي | ماذا يعني ذلك |
|---|---|---|
| 🟢 تعزيز / دقة عالية | أداء كامل | جميع ميزات الذكاء الاصطناعي نشطة، 30 إطارًا في الثانية، دورية كاملة |
| 🟡 متوازن | متوسط الطاقة | 10 إطارًا في الثانية، اكتشاف أساسي، دورية محدودة |
| 🔴 اقتصادي / توفير فائق | وضع البقاء | الذكاء الاصطناعي معلق،, تشغيل بواسطة PIR7 فقط، اتصالات نبضات القلب |
الطبقة 2: مقاييس الطاقة
أسفل شارة الوضع، سترى:
- شحن البطارية (TP3T) — مستوى الشحن الحالي
- مدخلات الطاقة الشمسية (واط) — مقدار الطاقة التي يولدها اللوح حاليًا
- سحب النظام (واط) — مقدار ما تستهلكه الكاميرا
- تدفق الطاقة الصافي — إيجابي يعني الشحن، سلبي يعني التفريغ
- وقت التشغيل المقدر — عدد الساعات التي ستستمر فيها البطارية عند السحب الحالي إذا انخفضت الطاقة الشمسية إلى الصفر
الطبقة 3: سجل انتقال الوضع
تسجل التطبيقات الجيدة كل تبديل للوضع مع طابع زمني. هذا أمر بالغ الأهمية لاستكشاف الأخطاء وإصلاحها. إذا اشتكى عميل من اكتشافات فائتة في الساعة 4 مساءً، يمكنك التحقق من السجل ورؤية أن الكاميرا انتقلت إلى وضع Eco في الساعة 3:47 مساءً لأن مجموعة من السحب دخلت وانخفضت نسبة الشحن إلى ما دون الحد الأدنى.
لماذا هذا مهم لعملك التجاري
بصفتك مُدمجًا، تحتاج إلى إثبات لعميلك النهائي أن النظام يعمل. يعني مؤشر الوضع الواضح في التطبيق عددًا أقل من مكالمات الدعم. عندما يسأل المزارع “لماذا لم يلتقط هذا الذئب الليلة الماضية؟” يمكنك استعراض السجل وإظهار: “كانت الكاميرا في وضع Ultra-Save في ذلك الوقت لأن الأمس كان غائمًا. نحتاج إلى إضافة بطارية ثانية أو لوحة أكبر لتغطية الشتاء.” هذا هو البيع الإضافي المدفوع بالبيانات، وليس تخمينًا.
إشعارات الدفع لتغييرات الوضع
تسمح لك معظم المنصات بتعيين تنبيهات لانتقالات الوضع. أوصي بتمكين إشعار الدفع كلما انخفض النظام من Boost إلى Eco. يمنحك هذا تحذيرًا مبكرًا بأن ميزانية الطاقة ضيقة - قبل أن تنقطع الكاميرا تمامًا عن العمل.
ما مدى دقة تتبع الهدف أثناء حالة “الدقة العالية” القصوى للطاقة؟
اختبرت هذا بنفسي في موقع عمل. نفس الكاميرا، نفس الهدف، نفس المسافة - ولكن اختبار واحد في الظهيرة واختبار واحد عند الغسق عندما كانت البطارية منخفضة. كان الفرق ليس دقيقًا.
دقة التتبع تتحسن بشكل كبير في وضع الدقة العالية8.
![]() مقارنة دقة تتبع الهدف بين وضع الدقة العالية ووضع Eco
مقارنة دقة تتبع الهدف بين وضع الدقة العالية ووضع Eco
من أين تأتي مكاسب الدقة
التحسين ليس من عامل واحد. إنه مزيج من عدة أنظمة تعمل جميعها بكامل طاقتها في نفس الوقت:
العامل 1: معدل الإطارات والتنبؤ
عند 30 إطارًا في الثانية، يحصل متتبع الذكاء الاصطناعي على 6 أضعاف نقاط البيانات في الثانية مقارنة بـ 5 إطارات في الثانية. المزيد من البيانات يعني تنبؤًا أفضل بالحركة. يمكن للخوارزمية حساب السرعة والاتجاه والتسارع بثقة أعلى بكثير. عندما يغير الهدف اتجاهه فجأة، يلتقطه متتبع 30 إطارًا في الثانية في غضون 1-2 إطار (33-66 مللي ثانية). قد لا يلاحظ متتبع 5 إطارات في الثانية لمدة 200 مللي ثانية - وهو الوقت الذي يكون فيه الهدف قد غادر الإطار.
العامل 2: سرعة استجابة المحرك
في وضع Eco، تتلقى المحركات الخطوية تيارًا مخفضًا لتوفير الطاقة. هذا يجعلها أبطأ في البدء وأبطأ في التوقف. النتيجة هي تجاوز - تمر الكاميرا بالهدف وتضطر إلى التصحيح للخلف. في وضع Boost، يعني التيار الكامل:
- تسارع أسرع (تبدأ الكاميرا في التحرك مبكرًا)
- تباطؤ أسرع (تتوقف الكاميرا بدقة على الهدف)
- تذبذب أقل (تصحيحات أقل ذهابًا وإيابًا)
العامل 3: عتبة ثقة التعرف
في وضع Eco، يستخدم الذكاء الاصطناعي نموذجًا خفيف الوزن بدرجات ثقة أقل. لتجنب الإنذارات الكاذبة، يضبط النظام عتبة ثقة عالية - مما يعني أنه يتجاهل أي شيء ليس متأكدًا منه جدًا. هذا يسبب اكتشافات فائتة. في وضع Boost، ينتج النموذج الكامل درجات ثقة أعلى بشكل طبيعي، لذلك يمكن أن تظل العتبة كما هي مع التقاط المزيد من الأهداف الحقيقية.
مقارنة الأداء في العالم الحقيقي
| متري | الوضع البيئي (انخفاض SoC) | وضع الدقة العالية (ارتفاع SoC) |
|---|---|---|
| معدل نجاح قفل الهدف | ~60% | >95% |
| متوسط وقت القفل (من الاكتشاف) | 800 مللي ثانية | 200 مللي ثانية |
| تردد تجاوز حركة PTZ | 1 في 3 حركات | 1 في 15 حركة |
| أقصى سرعة هدف قابلة للتتبع | ~30 كم/ساعة | ~80 كم/ساعة |
| إعادة الاستحواذ بعد الانسداد | غالبًا ما يفشل | ينجح ~90% من الوقت |
ماذا يعني ذلك بالنسبة لمشاريعك
إذا كنت تنشر كاميرات على جسر علوي للطرق السريعة أو مدخل موقع بناء حيث تتحرك المركبات بسرعة، فإن الفرق بين وضع Eco و Boost هو الفرق بين نظام مفيد ونظام عديم الفائدة. لهذا السبب أقول دائمًا للمدمجين: قم بقياس حجم الألواح الشمسية والبطارية لموسم أسوأ الحالات، وليس الأفضل. تريد أن تكون كاميراتك في وضع Boost لأكبر عدد ممكن من الساعات يوميًا - خاصة خلال الساعات الأكثر أهمية لاحتياجات أمان عميلك.
نصيحة عملية
بالنسبة للمواقع التي تتزامن فيها ساعات الذروة للتهديد مع ساعات الذروة للطاقة الشمسية (مثل سرقة مواقع البناء نهارًا)، فأنت محظوظ - يعمل النظام بشكل طبيعي في أفضل حالاته عندما تكون في أمس الحاجة إليه. بالنسبة للمواقع التي تبلغ فيها ذروة التهديدات ليلاً (مثل اقتحام الممتلكات الريفية)، تحتاج إلى التأكد من أن الفائض الشمسي النهاري يشحن البطارية بالكامل حتى يتمكن النظام من العمل في وضع Balanced طوال الليل بدلاً من الانخفاض إلى Ultra-Save قبل الفجر.
الخاتمة
كاميرات PTZ الشمسية تصبح أذكى وأسرع عندما تكون الشمس قوية - ولكن مستوى البطارية، وليس الساعة، هو الذي يطلق الزناد. قم بقياس حجم نظام الطاقة الخاص بك بشكل صحيح، وسيعمل الذكاء الاصطناعي لديك بكامل قوته بالضبط عندما يكون ذلك مهمًا.
1. تعرف على كيف يفتح وضع الدقة العالية الأداء الكامل للذكاء الاصطناعي والمحرك عندما تكون الطاقة وفيرة. ︎↩︎ 2. يشير هذا إلى استراتيجية البرامج الثابتة التي تضبط إنتاجية الذكاء الاصطناعي بناءً على الطاقة المتاحة. ︎↩︎ 3. يؤثر معدل الإطارات بشكل مباشر على سلاسة ودقة تتبع الذكاء الاصطناعي. ︎↩︎ 4. يقيس TOPS أداء الحوسبة الخام لوحدة معالجة العصبية (NPU)، وهو أمر بالغ الأهمية لتشغيل نماذج الذكاء الاصطناعي المعقدة. ︎↩︎ 5. تجمع دورية الدوران المستمر بزاوية 360 درجة بين حركة المحرك وتحليلات الذكاء الاصطناعي، مما يستهلك قدرًا كبيرًا من الطاقة. ︎↩︎ 6. تراقب وحدة إدارة البطارية (BMS) حالة الشحن (SoC) ومعدل الشحن، وتغذي البيانات التي تؤدي إلى تغيير الأوضاع. ︎↩︎ 7. تشغل مستشعرات الأشعة تحت الحمراء السلبية الكاميرا للاستيقاظ من وضع السكون العميق لأحداث الحركة. ︎↩︎ 8. تحدد مقاييس الدقة مثل معدل نجاح القفل وإعادة الاستحواذ بعد الانسداد موثوقية النظام. ︎↩︎