
Eu já vi mais baratos Câmeras PTZ1 perderem seu alvo no momento em que duas pessoas se cruzam. É frustrante, caro e, em aplicações de segurança, potencialmente perigoso.
O sistema se fixa no alvo inicial usando uma abordagem de quatro camadas: descritores de aparência profunda (Re-ID2) criam uma impressão digital visual, Filtro de Kalman3 prevê o movimento durante a oclusão, o Algoritmo Húngaro4 resolve a atribuição de ID através da otimização de custo, e IA de ponta5 mantém tudo funcionando localmente mesmo quando o link 4G cai.
 Câmera PTZ rastreando múltiplos alvos cruzando caminhos
Câmera PTZ rastreando múltiplos alvos cruzando caminhos
Abaixo, detalharei cada camada dessa lógica de rastreamento. Explicarei como funciona em implantações PTZ solares 4G do mundo real e por que isso é importante para integradores de sistemas que não podem se dar ao luxo de uma falha de “troca de alvo” em campo.
Índice
A Câmera “Trocará” para uma Segunda Pessoa se Ela Cruzar Caminhos com o Alvo Original?
Eu já vi isso acontecer em canteiros de obras. Dois trabalhadores passam um pelo outro e, de repente, a câmera está seguindo o cara errado. O cliente liga, irritado. Você envia um caminhão. Isso é dinheiro perdido.
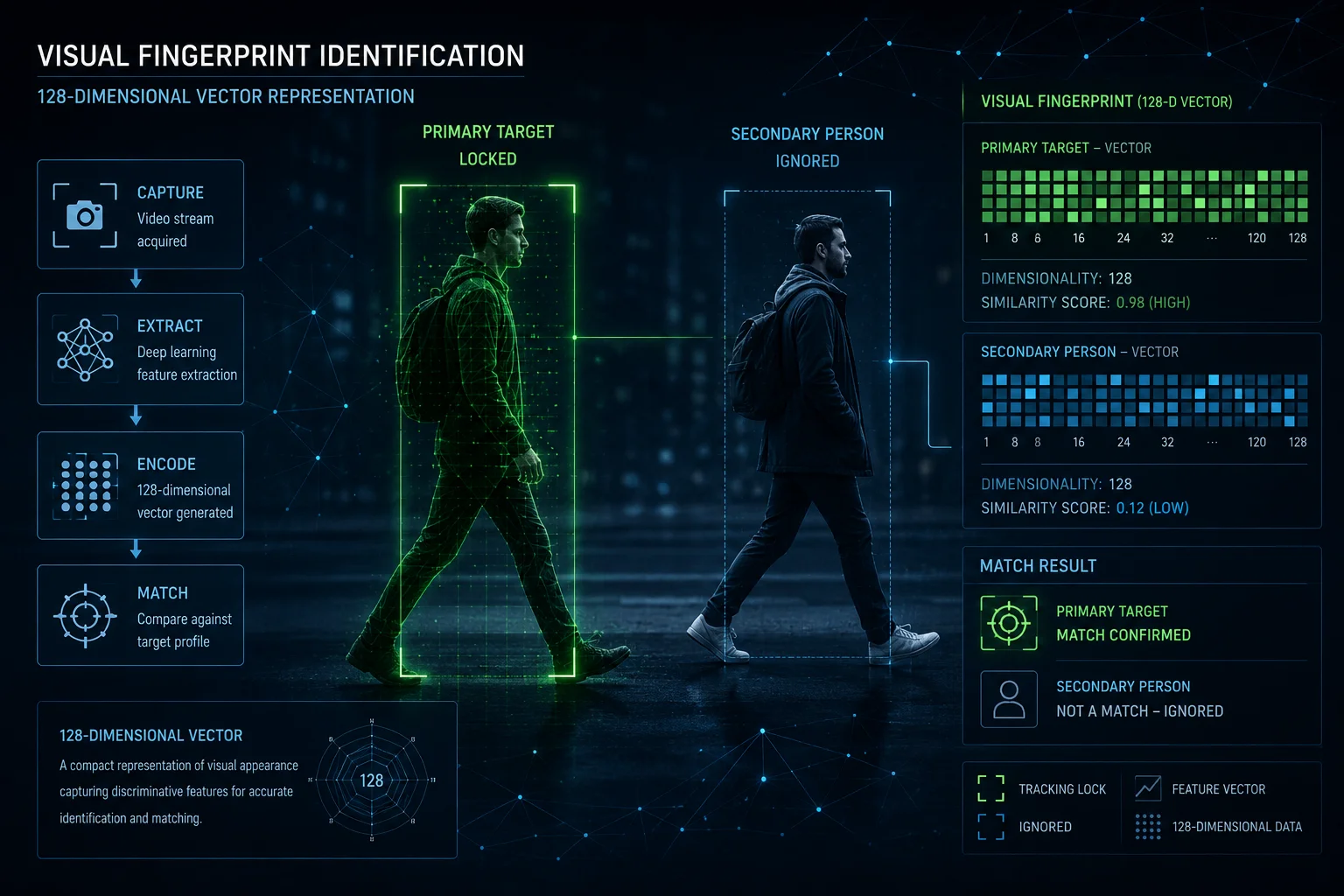
Não, uma PTZ devidamente projetada não trocará de alvo. O sistema mantém uma impressão digital visual do alvo original usando descritores de aparência profunda. Mesmo quando duas pessoas se sobrepõem completamente no quadro, o algoritmo compara continuamente os vetores de características armazenados e reatribui o ID correto assim que elas se separam.
 Câmera PTZ mantendo o bloqueio do alvo durante o cruzamento de pessoas
Câmera PTZ mantendo o bloqueio do alvo durante o cruzamento de pessoas
Por que Câmeras Baratas Falham Nisso
A maioria das câmeras de rastreamento automático de baixo custo depende de um único método: caixa delimitadora11 posição. Elas rastreiam um retângulo na tela. Quando dois retângulos se fundem em um, o sistema entra em pânico. Ele escolhe qualquer retângulo que emerge primeiro, ou aquele que está mais próximo do centro do quadro. Isso é um lance de moeda. Cinquenta por cento das vezes, ele segue a pessoa errada.
Como o Re-ID Previne a Troca
Nosso sistema faz algo fundamentalmente diferente. No momento em que você foca em um alvo, o SoC integrado executa um modelo leve ResNet6 . Ele extrai o que chamamos de ‘impressão digital visual12.’. Isso inclui:
- Histograma de cores: A distribuição de cores nas roupas do alvo, de cima para baixo.
- Proporção de aspecto: A proporção altura/largura da forma do corpo.
- Detecção de acessórios: Mochilas, chapéus, bolsas. Estes adicionam pontos de dados únicos.
Tudo isso é comprimido em um vetor de 128 dimensões. Pense nisso como um resumo matemático da aparência dessa pessoa. Quando duas pessoas se cruzam, o sistema não vê apenas “dois borrões se fundindo”. Ele vê dois vetores distintos. Após o cruzamento, ele compara cada alvo emergente com o vetor armazenado. A correspondência mais próxima mantém o ID original.
O Que Acontece Durante Oclusão Total
Há uma breve janela, às vezes de 5 a 15 quadros, onde o alvo original está completamente escondido atrás da segunda pessoa. Durante esse tempo, a impressão digital visual é inútil porque não há nada para ver. É aqui que o Filtro de Kalman assume. Explicarei isso na próxima seção.
| Método de Rastreamento | Risco de Troca de Alvo | Usado Em |
|---|---|---|
| Apenas caixa delimitadora | Alto (falha de 50%+) | Câmeras de consumo econômicas |
| Re-ID + posição | Baixo (falha abaixo de 5%) | Sistemas PTZ industriais |
| Re-ID + Kalman + Húngaro | Muito baixo (abaixo de 1%) | Nossa plataforma PTZ solar 4G |
Impacto no mundo real para integradores
Para alguém como David, que instala câmeras em canteiros de obras remotos ou fazendas solares, uma troca de alvo não é apenas irritante. Significa que a câmera agora está apontada na direção errada. O intruso real vai embora sem ser gravado. O cliente vê as imagens mais tarde e pergunta por que a câmera seguiu um motorista de entrega em vez do invasor. Isso é uma disputa contratual esperando para acontecer.
A IA Usa “Marcação de ID Visual” para Garantir que Siga a Mesma Pessoa em uma Multidão?
Recebo muito essa pergunta de integradores que avaliam nosso sistema em comparação com concorrentes. Eles querem saber se o rastreamento é verdadeiramente persistente ou apenas “grudento” até que algo o confunda.
Sim, a IA atribui uma tag de ID visual persistente ao alvo travado. Essa tag é um vetor de características de alta dimensão extraído por uma rede neural profunda. Funciona como uma impressão digital digital que permanece anexada ao alvo, independentemente de quantas outras pessoas entrem no quadro.
![]() Sistema de marcação de ID visual por IA identificando alvo na multidão
Sistema de marcação de ID visual por IA identificando alvo na multidão
Como funciona a marcação de ID visual passo a passo
Deixe-me percorrer a sequência exata que acontece dentro do processador da câmera quando você inicia um bloqueio de alvo:
Etapa 1: Bloqueio inicial e extração de características
O operador clica em um alvo (ou a IA seleciona automaticamente com base nas regras da zona de intrusão). Em 50 milissegundos, o SoC recorta a região do alvo e a alimenta através de uma rede de extração de características pré-treinada. A saída é um vetor de 128 floats. Este vetor é armazenado na memória local como a “identidade de referência”.”
Etapa 2: Comparação quadro a quadro
Em cada quadro subsequente, o sistema detecta todas as pessoas em vista. Para cada pessoa detectada, ele extrai o mesmo tipo de vetor. Em seguida, ele calcula a similaridade de cosseno7 entre cada vetor detectado e a referência armazenada. A correspondência de maior pontuação acima de um limite de confiança (geralmente 0,75) recebe o ID original.
Etapa 3: Atualização adaptativa
Eis algo que a maioria das pessoas perde. O vetor de referência não é estático. À medida que a iluminação muda, à medida que o alvo gira, o sistema atualiza lentamente a referência usando uma média móvel exponencial8. Isso evita desvios, ao mesmo tempo que se adapta a mudanças graduais de aparência, como uma pessoa tirando uma jaqueta.
| Estágio | Orçamento de Tempo | O que acontece |
|---|---|---|
| Extração de recursos | ~50ms | O ResNet corta e codifica o alvo |
| Comparação de vetores | ~10ms por alvo | Similaridade de cosseno contra todas as detecções |
| Atribuição de ID | ~5ms | O algoritmo Húngaro resolve conflitos |
| Atualização de referência | ~2ms | A média móvel exponencial ajusta o vetor armazenado |
Por que isso importa em redes 4G
Em um sistema PTZ solar 4G, você pode estar transmitindo a 15fps para economizar largura de banda. Isso significa que cada quadro é precioso. Se o sistema perder o ID por apenas dois quadros, são 130ms de rastreamento cego. Nossa IA de ponta lida com tudo isso localmente. O link 4G transporta o fluxo de vídeo para o NVR ou nuvem, mas a decisão de rastreamento nunca sai da câmera. Mesmo que o sinal 4G caia por 3 segundos, o PTZ continua girando, continua seguindo, continua travado.
Limites de Densidade de Multidão
Serei honesto sobre os limites. Em uma multidão de mais de 30 pessoas juntas, a precisão do Re-ID cai. Os vetores começam a parecer semelhantes quando todos usam roupas semelhantes. Para cenários de segurança típicos, de 5 a 10 pessoas em quadro, o sistema mantém mais de 95% de persistência de ID correta. Para cenários de multidão densa, recomendamos o emparelhamento com uma câmera grande angular fixa em uma configuração de lente dupla para consciência panorâmica.
Como Resolver o Bug de “Troca de Alvo” Comum em Câmeras de Rastreamento Automático Mais Baratas?
Esta é a pergunta que separa integradores sérios de compradores casuais. Se você já implantou câmeras suficientes, já viu o bug de troca. Você sabe o quão caro é explicar isso a um cliente.
Resolvemos a troca de alvo através de uma defesa de três camadas: o Algoritmo Húngaro calcula a atribuição ótima global em todos os objetos rastreados, o Filtro de Kalman mantém a previsão de trajetória durante a oclusão e um decaimento de confiança9 temporizador força a readquisição se a pontuação de correspondência cair abaixo do limite por muito tempo.
![]() Visualização do algoritmo de resolução de troca de alvo
Visualização do algoritmo de resolução de troca de alvo
A Causa Raiz da Troca de Alvo
A troca de alvo acontece por causa de um atalho preguiçoso no design do algoritmo. Sistemas baratos usam atribuição de “vizinho mais próximo”. A cada quadro, eles olham onde o alvo estava no quadro anterior e, em seguida, atribuem o ID à detecção mais próxima dessa posição. Isso funciona bem quando os alvos estão distantes um do outro. No momento em que dois alvos chegam a poucos pixels um do outro, o vizinho mais próximo se torna um jogo de adivinhação.
Nossa Defesa de Três Camadas
Camada 1: Algoritmo Húngaro para Atribuição Ótima Global
Em vez de atribuir IDs um por um (abordagem gulosa), resolvemos o problema de atribuição globalmente. O Algoritmo Húngaro constrói uma matriz de custo onde:
- Linhas representam IDs rastreados existentes
- Colunas representam novas detecções no quadro atual
- Cada célula contém um custo ponderado combinando distância de aparência, distância de movimento e distância espacial
O algoritmo encontra a atribuição que minimiza o custo total em TODOS os alvos simultaneamente. Isso significa que, mesmo que o Alvo A esteja ligeiramente mais perto da Detecção 2, o sistema ainda pode atribuir o Alvo A à Detecção 1 se isso produzir uma melhor solução global.
Camada 2: Filtro de Kalman para Continuidade de Movimento
O Filtro de Kalman mantém uma estimativa de estado para cada alvo: posição (x, y), velocidade (vx, vy) e aceleração. Quando um alvo desaparece atrás de outro objeto, o filtro continua prevendo onde ele deveria estar. Após o término da oclusão, a posição prevista se torna uma forte prioridade na matriz de custo. Um alvo que aparece exatamente onde o filtro previu que estaria recebe um bônus massivo na pontuação de atribuição.
Camada 3: Decaimento de Confiança e Readquisição
Às vezes, apesar de todas as precauções, o sistema não tem certeza. Talvez ambos os alvos usem uniformes idênticos. Talvez a oclusão tenha durado muito tempo. Nesses casos, a pontuação de confiança cai abaixo de 0,6. O sistema entra em um estado “tentativo”. Ele continua rastreando o melhor candidato, mas marca o fluxo com um marcador de metadados. Se a confiança não se recuperar em 30 quadros, o sistema pode:
- Manter a posição e aguardar o operador
- Readquirir com base no último vetor de movimento conhecido
Por que isso importa para implantações solares remotas
Em um local alimentado por energia solar sem pessoal permanente, não há ninguém para corrigir manualmente uma troca. A câmera deve acertar autonomamente. Nosso processamento de ponta garante que, mesmo em taxas de quadros reduzidas (comum quando a bateria está baixa), os algoritmos de previsão preenchem as lacunas. O PTZ não treme nem caça. Ele se move suavemente ao longo do caminho previsto.
| Modo de Falha | Resposta de Câmera Barata | Resposta do Nosso Sistema |
|---|---|---|
| Dois alvos se cruzam em velocidade de caminhada | 50% chance de troca | Vetor Re-ID resolve em 2-3 quadros |
| Alvo totalmente ocluído por 1 segundo | Perde o rastreamento, caça aleatoriamente | Kalman prevê o caminho, PTZ segue a previsão |
| 4G cai durante o evento de cruzamento | Congela ou reinicia | Edge AI continua o rastreamento autônomo |
| Três ou mais alvos se agrupam | Atribui IDs aleatoriamente | Algoritmo Húngaro encontra o ótimo global |
Posso Definir uma “Zona de Prioridade” Onde a Câmera Sempre Fixará a Primeira Pessoa que Ela Vê?
Esta é uma questão prática de implantação. Os integradores querem saber se podem definir uma área de gatilho, como uma linha de cerca, ou uma porta, onde a câmera começa a rastrear automaticamente quem quer que entre primeiro.
Sim, você pode definir zonas de prioridade10 (também chamadas de regiões de detecção de intrusão) onde a câmera travará automaticamente no primeiro alvo em forma humana que entrar. O sistema usa o limite da zona como um gatilho, e então inicia imediatamente o pipeline completo de Re-ID e rastreamento nessa primeira detecção.
 Configuração de zona de prioridade na interface da câmera PTZ
Configuração de zona de prioridade na interface da câmera PTZ
Como as Zonas de Prioridade Funcionam na Prática
Uma zona de prioridade é um polígono que você desenha na interface web da câmera ou através do VMS. Você define a forma, a sensibilidade e as regras. Quando um alvo cruza essa zona, a câmera o trata como um comando de bloqueio. Aqui está a sequência:
Opções de Configuração
Você obtém vários parâmetros para ajustar:
- Forma da zona: Retângulo, polígono ou cruzamento de linha. Cruzamento de linha é útil para perímetros de cercas.
- Filtro de alvo: Apenas humano, apenas veículo ou ambos. Isso impede que a câmera se fixe em animais ou detritos soprados.
- Regra de prioridade: Primeiro a entrar, primeiro a ser bloqueado. Se uma segunda pessoa entrar enquanto a câmera já está rastreando, o sistema a ignora, a menos que o primeiro alvo saia completamente da cena.
- Tempo de permanência: Quanto tempo a câmera permanece bloqueada antes de retornar à patrulha. Você pode definir isso como infinito para rastreamento permanente até que o alvo saia.
A Lógica do “Primeiro a Entrar”
Quando várias pessoas entram na zona simultaneamente (dentro do mesmo quadro), o sistema precisa de um critério de desempate. Nossa implementação usa uma regra simples: o alvo mais próximo do centro da zona tem prioridade. Isso é configurável. Alguns integradores preferem “maior caixa delimitadora” (mais próximo da câmera) ou “movendo-se mais rápido” (ameaça mais provável).
Integração com Patrulha PTZ
A maioria das implantações usa a câmera no modo de patrulha. Ela varre para frente e para trás em um tour predefinido. Quando uma zona de prioridade é acionada, a patrulha pausa. A PTZ se fixa no alvo e o segue. Assim que o alvo sai do limite de rastreamento definido (uma área maior ao redor da zona de prioridade), a câmera retorna à sua posição de patrulha e retoma o tour.
Casos Extremos e Limitações Honestos
Quero ser transparente sobre onde isso pode ficar complicado:
- Entrada simultânea: Se 5 pessoas passarem juntas por um portão, a câmera só consegue seguir fisicamente uma. As outras são gravadas pela lente grande angular se você estiver usando uma configuração de sensor duplo, mas a PTZ se compromete com um alvo.
- Confusão de reentrada: Se o alvo rastreado sair e reentrar na zona 10 minutos depois vestindo uma jaqueta diferente, o sistema o trata como um novo alvo. O Re-ID funciona dentro de uma sessão de rastreamento contínua, não ao longo de horas.
- Desempenho noturno: À noite, com iluminação IR, as informações de cor são perdidas. O vetor Re-ID depende mais fortemente da forma do corpo e do padrão de movimento. A precisão cai aproximadamente 10-15% em comparação com o dia.
Por que este recurso economiza dinheiro para locais remotos
Para a implantação típica de David, uma PTZ solar no perímetro de um canteiro de obras, a zona de prioridade elimina falsas ativações. Sem ela, a câmera poderia travar em um carro passando na estrada atrás da cerca. Com uma zona desenhada corretamente cobrindo apenas o interior da linha da cerca, a câmera ignora tudo do lado de fora. Isso economiza bateria (menos movimentos desnecessários da PTZ), economiza largura de banda (menos clipes de alarme falsos enviados via 4G) e poupa o cliente da fadiga de alertas.
Conclusão
O travamento de alvo em cenários de múltiplos cruzamentos depende de quatro coisas trabalhando juntas: impressão digital visual, previsão de movimento, matemática de atribuição ótima e processamento local na borda. Acertando as quatro, a câmera permanece no alvo mesmo quando a rede não está.
1. Aprenda os princípios básicos e aplicações das câmeras Pan-Tilt-Zoom. ︎↩︎ 2. Entenda como a reidentificação de pessoas usa características de aparência para rastrear indivíduos em diferentes visualizações de câmera. ︎↩︎ 3. Explore o algoritmo matemático usado para previsão de movimento e estimação de estado. ︎↩︎ 4. Leia sobre o algoritmo de otimização combinatória para resolver problemas de atribuição. ︎↩︎ 5. Aprenda como o processamento de IA é realizado localmente nos dispositivos, em vez de na nuvem. ︎↩︎ 6. Entenda a arquitetura de rede residual profunda usada para extração de características. ︎↩︎ 7. Aprenda como a similaridade de cosseno mede o ângulo entre vetores para determinar a similaridade. ︎↩︎ 8. Veja como as médias ponderadas exponencialmente são usadas para atualizações adaptativas. ︎↩︎ 9. Entenda como os limiares de confiança e os temporizadores de decaimento evitam atribuições falsas. ︎↩︎ 10. Descubra como zonas definidas (regiões de detecção de intrusão) acionam o rastreamento automático. ︎↩︎ 11. Aprenda sobre caixas delimitadoras retangulares usadas na detecção e rastreamento de objetos. ︎↩︎ 12. Entenda como vetores de características (impressões digitais visuais) identificam unicamente objetos rastreados. ︎↩︎