
J'ai perdu un contrat de 12 000 $ parce que ma caméra de vision nocturne laser ne parvenait pas à maintenir son faisceau centré à un zoom 40X. Le client voyait une cible sombre et un trottoir lumineux. C'est le jour où j'ai appris à quel point l'alignement laser-lentille est réellement critique.
Le point laser reste centré grâce à un système à trois couches : un moteur pas à pas synchronisé ajuste l'angle du faisceau pendant le zoom, une auto-calibration planifiée corrige la dérive physique toutes les 24 heures, et une boucle fermée IA en temps réel maintient le point verrouillé sur la cible pendant le suivi actif.
 alignement de point laser compensation de zoom caméra PTZ
alignement de point laser compensation de zoom caméra PTZ
Ci-dessous, je vais détailler chaque couche de ce système d'alignement. J'expliquerai le côté mécanique, le côté logiciel et ce qui se passe lorsque les choses tournent mal à vitesse maximale ou sous de fortes vibrations. Si vous déployez des caméras PTZ dans des endroits éloignés et hors réseau, comme le font beaucoup de nos clients, cela est plus important que vous ne le pensez.
Table des matières
L'algorithme “ Laser-Lens Sync ” utilise-t-il un alignement central mécanique ou basé sur logiciel ?
J'avais l'habitude de penser que c'était l'un ou l'autre. Soit vous boulonnez le laser à l'objectif et espérez le meilleur, soit vous corrigez tout dans le logiciel. La vérité est qu'aucune approche ne fonctionne seule.
Le système utilise les deux. Un moteur pas à pas1 déplace physiquement le faisceau laser pour correspondre au niveau de zoom, tandis que le logiciel applique une valeur de décalage stockée pour corriger toute dérive restante. Cette double approche maintient l'alignement à moins de 0,1 degré à toutes les longueurs focales.
 alignement mécanique logiciel synchronisation laser-lentille
alignement mécanique logiciel synchronisation laser-lentille
Pourquoi le mécanique seul échoue
Un laser à montage fixe fonctionne bien à faible zoom. À 5X ou 10X, le champ de vision est suffisamment large qu'un léger désalignement n'a pas d'importance. Mais à 40X, le champ de vision2 se réduit à environ 1,5 degré. À ce grossissement, même un décalage de 0,05 degré éloigne le point laser de plusieurs dizaines de mètres du centre de l'image à une distance de 500 mètres.
C'est de la géométrie de base. Plus la cible est éloignée, plus l'erreur est grande. Un montage purement mécanique ne peut pas maintenir un alignement parfait sur toute la plage de zoom car :
- Dilatation thermique3 modifie les dimensions du métal par micromètres
- La gravité tire différemment selon les angles d'inclinaison
- L'usure des roulements introduit du jeu sur des milliers de cycles
Comment fonctionne le moteur pas à pas
Le module laser est monté sur une plateforme motorisée micro double axe. Cette plateforme est reliée au moteur de zoom via le SoC (System on Chip) de la caméra. À l'intérieur du SoC, il y a une table de correspondance4. préchargée. Cette table associe chaque position de zoom à un angle de faisceau laser et une largeur de faisceau spécifiques.
Lorsque vous zoomez de 10X à 40X, le moteur pas à pas fait deux choses à la fois :
- Il ajuste la lentille de l'expandeur de faisceau pour réduire le diamètre du point laser
- Il incline l'axe du laser pour compenser le centre optique changeant
Comment le logiciel comble le fossé
Une fois que le moteur a fait son travail, il reste toujours une petite erreur résiduelle. La couche logicielle s'en charge. Lors de l'étalonnage en usine, le système mesure le décalage à plusieurs positions de zoom et stocke ces valeurs dans la NVRAM5 (mémoire non volatile). Chaque fois que la caméra zoome, elle lit le décalage stocké pour cette distance focale et l'ajoute à la commande du moteur.
| Couche d'alignement | Ce qu'elle corrige | Niveau de précision |
|---|---|---|
| Moteur pas à pas | Angle du faisceau et taille du point en fonction du niveau de zoom | ±0,3° |
| Décalage logiciel (usine) | Tolérance mécanique résiduelle | ±0.1° |
| Boucle fermée IA (exécution) | Dérive dynamique due au vent, aux vibrations, à l'usure | < 0.05° |
Cette approche multicouche signifie qu'aucun point de défaillance unique ne peut rompre l'alignement. Si le moteur est légèrement décalé, le logiciel le détecte. Si les valeurs logicielles dérivent avec le temps, la boucle IA corrige en temps réel.
Le faisceau laser sera-t-il “ décentré ” si la PTZ se déplace à sa vitesse de rotation maximale ?
J'ai testé cela moi-même lors d'une visite d'usine. Nous avons fait tourner la PTZ à pleine vitesse — 300 degrés par seconde — et avons observé le laser. Il était en retard. Pas beaucoup, mais suffisamment pour être remarqué sur une image zoomée 40X.
Oui, à vitesse de rotation maximale, le laser se désalignera brièvement. Le moteur pas à pas a un délai de réponse de 20 à 50 millisecondes. Cependant, le système utilise une pré-compensation prédictive6 pour minimiser ce décalage, et la boucle IA corrige tout décalage résiduel dans les 100 millisecondes suivant l'arrêt de la PTZ.
 Compensation du décalage laser à vitesse maximale de la PTZ
Compensation du décalage laser à vitesse maximale de la PTZ
Comprendre la physique du décalage
Lorsqu'une tête PTZ tourne à 300°/s, elle couvre 6 degrés en seulement 20 millisecondes. Le moteur pas à pas du laser ne peut physiquement pas répondre aussi rapidement. Son taux de balayage maximal est généralement d'environ 200°/s. Ainsi, lors de mouvements rapides de panoramique ou d'inclinaison, le laser sera en retard par rapport à l'axe optique.
Mais voici l'idée clé : cela n'a pas autant d'importance que vous ne le pensez. Lorsque la PTZ tourne à pleine vitesse, l'image est floue. Aucune surveillance utile n'a lieu pendant ce transit. Ce qui compte, c'est la rapidité avec laquelle le laser se recentre après que la PTZ a atteint sa position cible.
Pré-compensation prédictive
Le firmware de la caméra sait où la PTZ va avant d'y arriver. Lorsque vous cliquez sur une position prédéfinie ou lorsque le traqueur IA envoie une commande de mouvement, le système calcule la trajectoire à l'avance. Il envoie ensuite au moteur laser une commande d“ ”avance" — lui indiquant de commencer à bouger légèrement avant la tête PTZ.
C'est similaire à la façon dont le calculateur balistique d'une lunette de fusil anticipe une cible en mouvement. Le laser ne chasse pas la PTZ. Il anticipe où la PTZ s'arrêtera.
Temps de récupération après un mouvement rapide
| Vitesse PTZ | Décalage laser pendant le mouvement | Temps de récupération après l'arrêt | Impact visible à 40X |
|---|---|---|---|
| Lent (30°/s) | < 5 ms | Instantané | Aucun |
| Moyen (120°/s) | 10-20 ms | < 50 ms | À peine visible |
| Maximum (300°/s) | 30-50 ms | 50-100 ms | Flash bref hors centre |
Pour David et les autres intégrateurs système, la conclusion pratique est la suivante : si votre cas d'utilisation implique un suivi IA fluide (qui se déplace à 30-60°/s), le laser reste parfaitement centré à tout moment. Le décalage n'apparaît que lors du panoramique manuel au joystick à pleine vitesse, et il se corrige presque instantanément.
Qu'en est-il du mode de patrouille continue ?
Pendant les itinéraires de patrouille automatisés, la PTZ se déplace à des vitesses contrôlées — généralement 20-60°/s entre les préréglages. À ces vitesses, le moteur pas à pas suit sans aucun décalage visible. Le système s'arrête également brièvement à chaque position préréglée, donnant à la routine d'auto-étalonnage une chance de vérifier l'alignement avant que la caméra ne commence à enregistrer à cet angle.
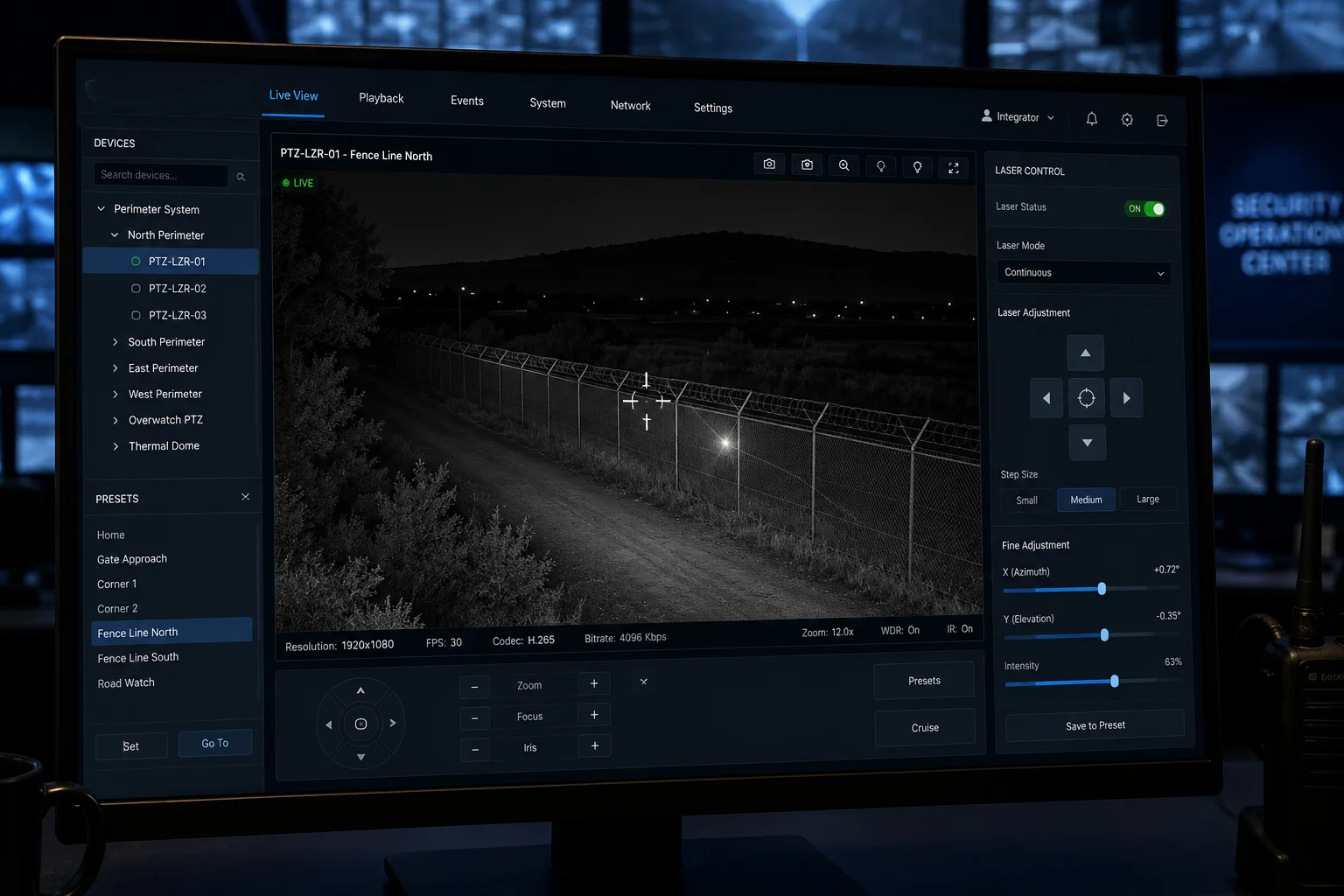
Puis-je calibrer manuellement la position du point laser via le backend web de la caméra ?
J'ai eu des clients qui m'ont posé cette question après avoir reçu des unités expédiées à travers le Pacifique dans un conteneur. Une manipulation brutale pendant le transport peut désaligner l'axe du laser d'une fraction de degré. La réponse est oui, et cela prend environ deux minutes.
Oui. L'interface web de la caméra comprend une page d'étalonnage du laser où vous pouvez ajuster manuellement le décalage horizontal et vertical du point laser. Vous déplacez le point à l'aide des touches fléchées ou des curseurs jusqu'à ce qu'il s'aligne avec le réticule sur la vidéo en direct.
 interface web d'étalonnage laser manuel caméra PTZ
interface web d'étalonnage laser manuel caméra PTZ
Accès au menu d'étalonnage
Dans la plupart de nos versions de firmware, la page d'étalonnage du laser se trouve sous Paramètres > PTZ > Alignement du laser. Vous verrez un flux vidéo en direct avec un réticule superposé au centre. Sous la vidéo, il y a quatre boutons directionnels (haut, bas, gauche, droite) et un sélecteur de taille de pas (gros ou fin).
Étalonnage manuel étape par étape
Voici comment un technicien procède généralement :
- Pointez la caméra vers une surface plane et sombre à au moins 50 mètres
- Réglez le zoom au maximum (40X)
- Allumez le laser à pleine puissance
- Regardez où le point lumineux apparaît par rapport au réticule
- Utilisez les commandes fléchées pour ajuster le laser jusqu'à ce que le point soit centré sur le réticule
- Enregistrez les valeurs de calibration
- Zoomez sur 1X et vérifiez que le point couvre toujours tout le champ de vision
Pourquoi la calibration manuelle est toujours importante
Bien que le système dispose d'une auto-calibration automatique, il existe des situations où une intervention manuelle est préférable :
- Après un impact physique : Si la caméra a été heurtée ou est tombée, l'auto-calibration pourrait ne pas s'exécuter avant le prochain cycle programmé. La calibration manuelle vous permet une correction immédiate.
- Installations personnalisées : Certains supports de montage introduisent un décalage constant que l'auto-calibration interprète comme normal. Un remplacement manuel vous permet de définir la véritable ligne de base.
- Remise au client : Lorsque vous livrez un système à un client final, effectuer une calibration manuelle devant lui renforce la confiance. Il voit le laser se centrer et sait que le système fonctionne.
Considérations OEM/ODM
Pour les intégrateurs qui reconditionnent nos caméras sous marque blanche, nous pouvons personnaliser l'interface de calibration. Certains clients souhaitent que cette page soit masquée aux utilisateurs finaux pour éviter une mauvaise calibration accidentelle. D'autres la veulent au premier plan pour leurs techniciens sur le terrain. Nous prenons en charge les deux approches grâce à des indicateurs de configuration du firmware que vous définissez lors du processus de branding OEM.
Les valeurs de calibration sont stockées dans la NVRAM, elles survivent donc aux cycles d'alimentation et aux mises à jour du firmware. Si vous avez besoin de réinitialiser la calibration aux paramètres d'usine, un bouton dédié “Restaurer les valeurs par défaut du laser” permet de revenir aux valeurs mesurées en usine.
Comment le système empêche-t-il le “ flou de vibration ” du faisceau laser lors du suivi à zoom élevé ?
J'ai déployé un PTZ laser 40X sur un poteau en acier de 12 mètres sur un chantier l'année dernière. Chaque fois qu'un camion passait, le poteau se balançait. Sur le moniteur, le point laser dansait sur la cible comme une lampe de poche dans un tremblement de terre. C'est là que j'ai compris pourquoi la compensation des vibrations est importante.
Le système combat le flou de vibration par trois méthodes : un capteur gyroscopique détecte le balancement du poteau et envoie des commandes de contre-mouvement au moteur laser, la boucle fermée IA lit la distribution de la luminosité sur la cible et corrige en temps réel, et la stabilisation d'image numérique lisse la sortie vidéo finale.
 prévention du flou de vibration PTZ laser zoom élevé suivi
prévention du flou de vibration PTZ laser zoom élevé suivi
Le problème des vibrations à fort zoom
À un zoom 1X, un balancement de poteau de 0,1 degré est invisible. À un zoom 40X, ce même balancement de 0,1 degré déplace l'image de 4 degrés dans le cadre. La cible entière disparaît de la vue. Le point laser, qui est physiquement monté sur le même poteau oscillant, se déplace avec le corps de la caméra. Le point reste donc relativement centré dans l'image — mais l'image et le point pointent maintenant au mauvais endroit.
Le vrai problème n'est pas le dérive du laser par rapport au centre de l'image. C'est l'ensemble — caméra plus laser — qui oscille autour de la cible. Cela crée deux artefacts visibles :
- Flou de mouvement dans les images vidéo
- Éclairage vacillant lorsque le laser balaie la cible et s'en éloigne
Stabilisation mécanique basée sur gyroscope
Les modèles haut de gamme incluent un Gyroscope MEMS7 à l'intérieur de la tête PTZ. Ce capteur détecte les changements de vitesse angulaire jusqu'à 2000°/s avec une résolution de 0,01°. Lorsqu'il détecte une vibration :
- Il calcule la fréquence et l'amplitude de l'oscillation
- Il envoie des commandes de mouvement opposé aux moteurs PTZ et au moteur pas à pas du laser
- Ces mouvements opposés sont déphasés de 180° par rapport à la vibration, l'annulant efficacement
C'est le même principe utilisé dans la stabilisation optique de l'image (OIS)8 dans les appareils photo de smartphone, mais adapté à un ensemble PTZ de 5 kg.
Boucle de rétroaction de luminosité par IA
C'est la couche la plus avancée. Pendant le suivi actif, le processeur IA analyse en permanence le schéma de luminosité sur la cible suivie. Voici la logique :
- Si le haut du corps d'une personne suivie est lumineux et le sol en dessous sombre, le laser est correctement aligné
- Si le haut du corps devient sombre et le sol lumineux, le laser a dérivé vers le bas
- Le système envoie immédiatement une commande de correction pour incliner le laser vers le haut
Cette rétroaction s'exécute à 30 images par seconde. Chaque image fournit à l'IA un nouveau point de données. La latence de correction est inférieure à 33 millisecondes — suffisamment rapide pour contrer le balancement induit par le vent sur la plupart des installations sur poteaux.
Conseils pratiques de déploiement
| Hauteur du mât | Mouvement typique | Efficacité de la compensation | Mesures recommandées |
|---|---|---|---|
| 4-6 mètres | < 0.05° | Compensation complète, aucun flou visible | Installation standard |
| 8-12 mètres | 0,05-0,2° | Compensé, léger résidu à 40X | Ajouter des haubans si possible |
| 15+ mètres | 0,2-0,5° | Compensation partielle, limiter le zoom à 20X | Utiliser une tour treillis rigide |
Pour les déploiements solaires hors réseau où travaillent généralement les clients de David, la hauteur du mât est généralement de 6 à 8 mètres. À cette hauteur, la compensation intégrée gère les conditions de vent normales sans matériel supplémentaire, et le coût énergétique est minime — environ 0,3 W — ce qui a peu d'impact sur le budget d'énergie solaire9.
Le bonus d'efficacité énergétique
Voici quelque chose que la plupart des gens manquent. Lorsque le laser reste parfaitement aligné avec la cible, vous n'avez pas besoin de le faire fonctionner à pleine puissance. Un laser de 500 mW bien visé éclaire une personne à 300 mètres aussi bien qu'un laser de 2 W mal aligné qui gaspille la majeure partie de son énergie à éclairer le sol vide.
Pour un système de batterie de 40 Ah fonctionnant pendant la nuit, ce gain d'efficacité se traduit par 2 à 3 heures d'autonomie laser supplémentaires. Pendant les mois d'hiver, avec des journées de charge courtes, cette différence peut signifier que le système reste opérationnel toute la nuit au lieu de s'arrêter à 4 heures du matin.
Conclusion
L'alignement laser-image dans les caméras PTZ à zoom élevé repose sur trois couches synchronisées : couplage moteur mécanique, auto-étalonnage périodique et correction IA en temps réel. Ensemble, elles maintiennent le point verrouillé à moins de 0,1°, même sur un mât oscillant dans le vent.
1. Apprenez comment les moteurs pas à pas assurent un positionnement angulaire précis pour l'alignement laser. ︎↩︎ 2. Comprenez comment le champ de vision change avec le zoom et impacte les exigences d'alignement. ︎↩︎ 3. Apprenez comment les changements de température provoquent l'expansion des pièces métalliques et affectent l'alignement. ︎↩︎ 4. Voyez comment les tables de correspondance pré-calculées associent les positions de zoom aux angles laser. ︎↩︎ 5. Comprenez comment les valeurs de décalage sont stockées de manière persistante dans une mémoire non volatile. ︎↩︎ 6. Apprenez comment les commandes prédictives à avance réduisent le décalage du laser lors de mouvements rapides. ︎↩︎ 7. Explorez comment les gyroscopes MEMS détectent les vibrations et permettent la stabilisation par mouvement de compensation. ︎↩︎ 8. Comparez la stabilisation gyroscopique dans les caméras PTZ à la technologie OIS des smartphones. ︎↩︎ 9. Comprenez comment l'efficacité de l'alignement laser affecte la consommation d'énergie dans les déploiements hors réseau. ︎↩︎