
غالبًا ما أسمع هذا السؤال لأن وضع الدورية يجب أن يفعل أكثر من مجرد التحرك. أريد أن تفكر كاميرتي وتكتشف وتتبع.
نعم، إنها تفعل ذلك. نظام PTZ الصناعي الخاص بنا1 يمكنه اكتشاف الأشخاص أو المركبات أثناء الدورية أو الرحلة، وإيقاف المسار مؤقتًا، والتبديل إلى التتبع التلقائي2 دون فقدان السيطرة على الهدف. هذا مثالي للمواقع غير المتصلة بالشبكة وعالية المخاطر.
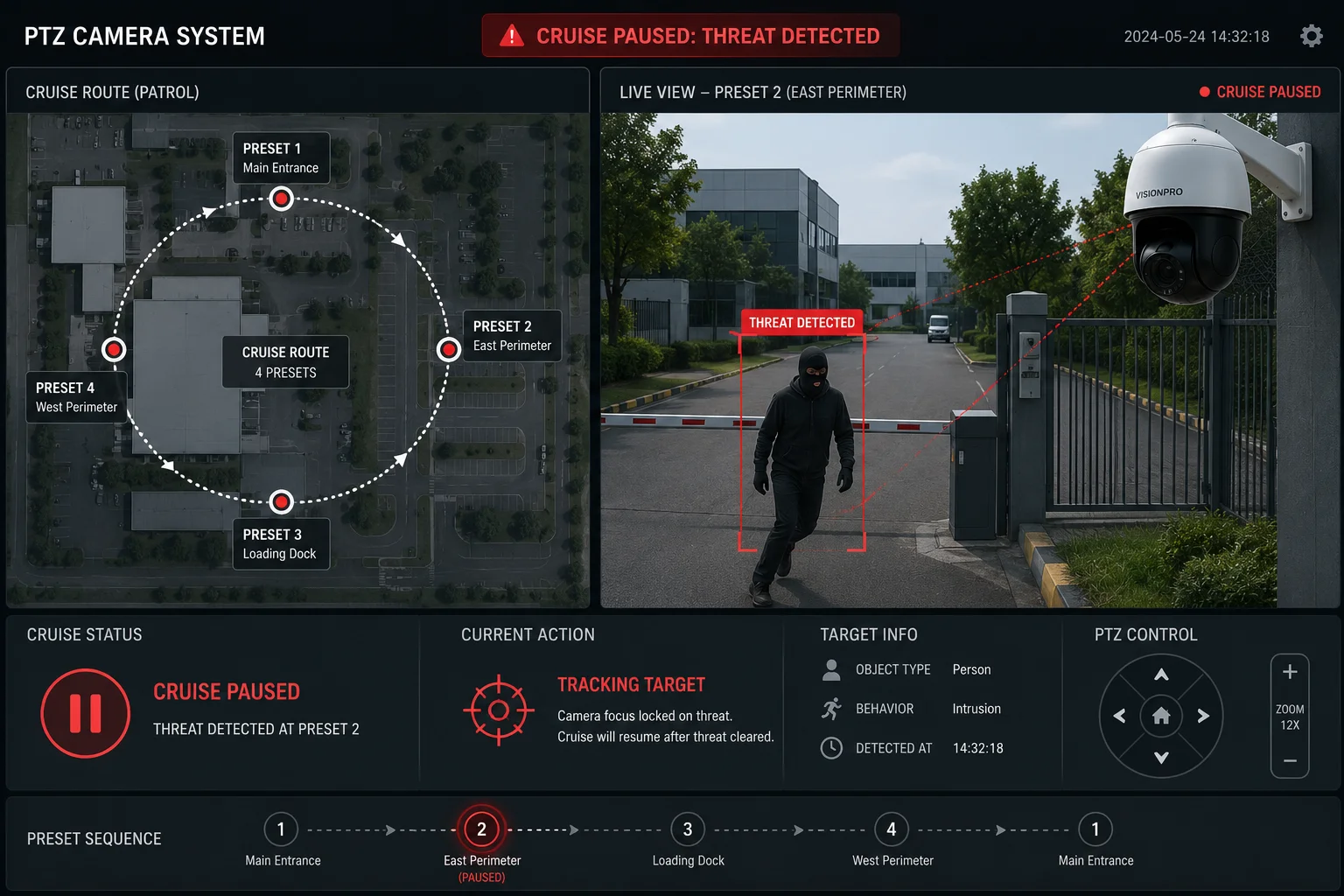
![]() تتبع تلقائي لدورية PTZ
تتبع تلقائي لدورية PTZ
أعرف أن العديد من المشترين يريدون نظامًا لا يقتصر على “النظر حوله”. أريده أن يحمي الموقع أثناء التحرك، وأريده أن يعود إلى الدورية بعد زوال التهديد.
جدول المحتويات
هل ستوقف الكاميرا رحلتها بزاوية 360 درجة إذا رصدت شخصًا في أحد الإعدادات المسبقة؟
أخشى هذا كثيرًا عندما أصمم خطة دورية، لأن الكاميرا المتحركة التي تفوت شخصًا لا فائدة منها تقريبًا.
نعم. عندما ترصد الكاميرا شخصًا أثناء إيقاف الإعداد المسبق4 ، يمكنها إيقاف الرحلة مؤقتًا، وتثبيت الهدف، وبدء التتبع. يتم الاحتفاظ بمسار الدورية، ويعطي النظام الأولوية للشخص المكتشف حتى تنتهي مهمة التتبع.
 PTZ رحلة إيقاف مؤقت تتبع إعداد مسبق كشف
PTZ رحلة إيقاف مؤقت تتبع إعداد مسبق كشف
أنا أبني هذا المنطق للمواقع الحقيقية، وليس لغرف العرض. في وضع الدورية3, ، لا تتوقف الكاميرا وتجلس هناك فحسب. إنها تبقي اكتشاف الذكاء الاصطناعي نشطًا أثناء وصولها إلى كل إعداد مسبق. إذا قمت بتعيين توقف عند بوابة أو زاوية سياج أو منطقة خزان وقود، يمكن للكاميرا مسح هذا المشهد لبضع ثوانٍ. إذا رأت شخصًا، فإنها توقف الرحلة على الفور. هذا مهم في أماكن مثل المزارع والساحات ومواقع البناء ومحطات المرافق. في تلك الأماكن، غالبًا ما يظهر التهديد أثناء الحركة، وليس بعد أن تستقر الكاميرا بالفعل.
كيف يعمل الاكتشاف أثناء الرحلة
أستخدم تعويض الحركة5 لمساعدة الذكاء الاصطناعي على قراءة المشهد أثناء تحرك PTZ. تدور الكاميرا، لذا تتحرك خلفية الصورة أيضًا. يقوم النظام بتصفية هذه الحركة ويركز على الأهداف الحقيقية. هذا يعني أن فرع شجرة يتحرك مع الرياح لا يؤدي دائمًا إلى نفس التنبيه مثل الشخص. يمكنني أيضًا تعيين وقت المكوث6 عند كل إعداد مسبق، بحيث يكون لدى الكاميرا نافذة مسح قصيرة في الأماكن الأكثر فائدة. إذا كنت أرغب في اهتمام أقوى عند البوابة واهتمام أضعف عند الطريق، يمكنني ضبط ذلك أيضًا. هذا يمنحني توازنًا أفضل بين التغطية والإنذارات الكاذبة.
لماذا هذا مهم للأمن خارج الشبكة
في المهام خارج الشبكة، لا أريد إرسال شاحنة في كل مرة يفشل فيها النظام في اكتشاف هدف. أريد كاميرا واحدة تقوم بعمل حارس يتحرك ويراقب باستمرار. كاميرا دورية مع اكتشاف أثناء الرحلة تساعدني في تقليل النقاط العمياء. كما أنها تمنحني فرصة أفضل لالتقاط اللحظة الأولى للدخول، وهي غالبًا اللحظة الأكثر أهمية. إذا كنت أحمي موقعًا فارغًا ليلاً، فإن هذا التنبيه المبكر يمكن أن يوفر عليّ الكثير من المتاعب لاحقًا.
سلوك الدورية الرئيسي
| حدث الدورية | إجراء الكاميرا | النتيجة |
|---|---|---|
| تصل الكاميرا إلى إعداد مسبق | تمسح بحثًا عن أشخاص أو مركبات | يظل الاكتشاف نشطًا |
| يظهر الهدف أثناء المكوث | تتوقف الرحلة | يبدأ التتبع |
| يغادر الهدف المشهد | يتوقف التتبع بعد تأخير | تستأنف الكاميرا الدورية |
| تظهر كائنات متعددة | يتم استخدام قاعدة الأولوية | يتم تحديد الهدف الأفضل |
كيف يحدد النظام أولوية الإعداد المسبق الذي يجب العودة إليه بمجرد انتهاء مهمة التتبع؟
أسأل دائمًا هذا عندما أخطط لمنطق الدوريات، لأن قاعدة إرجاع سيئة يمكن أن تهدر دورة الدورية بأكملها.
يمكن للكاميرا العودة إلى الإعداد المسبق التالي في قائمة الدورية، أو يمكنها العودة إلى موضع مراقبة ثابت. أقوم بتعيين الأولوية بناءً على مخاطر الموقع. إذا كان الإعداد المسبق المقطوع مهمًا، يمكن للكاميرا الاستئناف من تلك النقطة. إذا كان الموقع يحتاج إلى مسار صارم، يمكنه متابعة الدورية من المحطة التالية بدلاً من ذلك.
![]() موضع مراقبة دورية منطق إرجاع PTZ
موضع مراقبة دورية منطق إرجاع PTZ
يبدو هذا الجزء بسيطًا، ولكنه مهم جدًا في العمل الفعلي. إذا تتبعت كاميرتي شخصًا لمدة 40 ثانية ثم توقفت، فلا أريدها أن تتصرف بطريقة عشوائية. أريد قاعدة واضحة. في العديد من المشاريع، أحدد إحدى طريقتين. الطريقة الأولى هي “الاستئناف من حيث توقفت الدورية”. الطريقة الثانية هي “العودة إلى نقطة الحراسة الرئيسية أولاً”. أفضل الطريقة الثانية عندما تكون البوابة الأمامية هي المكان الأكثر أهمية. أفضل الطريقة الأولى عندما يجب أن يظل المسار نفسه كاملاً، مثل خط سياج طويل أو ساحة صناعية واسعة.
استراتيجيتان شائعتان للإرجاع
عندما أقوم بإعداد النظام، عادةً ما أختار من هذه الأنماط:
| استراتيجية الإرجاع | أفضل حالة استخدام | الفائدة |
|---|---|---|
| استئناف الدورية من الإعداد المسبق المتوقف | مسارات دورية طويلة | يحافظ على تغطية المسار بالكامل |
| العودة إلى موضع المراقبة أولاً | البوابات والمداخل ونقاط الوصول الرئيسية | يحمي المنطقة الأكثر أهمية |
| العودة إلى الإعداد المسبق التالي | حلقات دورية سريعة | يوفر الوقت ويحافظ على سلاسة الحركة |
كيف أقرر أي قاعدة سأستخدم
أنظر إلى تخطيط الموقع أولاً. ثم أسأل ما هو الخطر الرئيسي. إذا كان للموقع هدف قيم واحد، مثل بوابة مستودع أو ساحة محولات، فأريد أن تعود الكاميرا إلى هناك بسرعة. إذا كان الموقع كبيرًا والخطر منتشرًا، فأريد أن تظل الدورية في الموعد المحدد. أفكر أيضًا فيما سيستخدمه العميل للمراجعة. قد يفضل فريق الأمن نقطة عودة ثابتة لأنها سهلة التنبؤ بها. قد يفضل مدير الموقع استمرار المسار لأنه يعطي دورة دورية أنظف. أحب الأنظمة التي تسمح لي باختيار كليهما.
لماذا منطق العودة المتوقع مهم
قاعدة العودة المتوقعة تجعل الكاميرا أسهل في الثقة. كما أنها تساعد في مراجعة الإنذارات. إذا كنت أعرف أن الكاميرا ستعود دائمًا إلى الإعداد المسبق 1 بعد التتبع، يمكنني بناء خطة استجابة بسيطة. إذا كنت أعرف أن الكاميرا ستستأنف من نفس المكان الذي غادرت منه، يمكنني الحفاظ على توازن حلقة الدورية. في كلتا الحالتين، النقطة الرئيسية هي التحكم. لا أريد أن تنجرف الكاميرا. أريدها أن تقوم بمهمة واحدة، وتنهيها، ثم تعود إلى العمل بسرعة.
هل يمكنني تعيين “إعدادات مسبقة للكشف” محددة حيث تكون الذكاء الاصطناعي أكثر حساسية أثناء الدورية؟
أريد هذه الميزة لأن ليس كل جزء من الموقع يجب أن يعامل بنفس الطريقة.
نعم. يمكنني ضبط إعدادات الكشف المسبقة7 حيث يكون الذكاء الاصطناعي أكثر حساسية أثناء الدورية. هذا يسمح لي بالتركيز على المواقع عالية الخطورة مثل البوابات، مناطق التحميل، أو الحواف المسورة، مع الحفاظ على حساسية أقل في المناطق ذات الحركة الأكثر أمانًا.
 حساسية كشف PTZ في الدورية المسبقة
حساسية كشف PTZ في الدورية المسبقة
هذا هو أحد أكثر الأجزاء فائدة في نظام الدوريات الذكي. لا أريد نفس قاعدة الكشف لكل موقع. البوابة الأمامية ليست مثل الطريق العام. مدخل الساحة ليس مثل جدار التخزين. لذلك يمكنني تحديد الإعدادات المسبقة الرئيسية كمناطق ذات انتباه عالٍ. يمكنني جعل الكاميرا تقضي وقتًا أطول هناك، أو يمكنني جعلها تنبه بشكل أسرع هناك. بهذه الطريقة، لا أهدر أحداث الإنذار على المناطق منخفضة الخطورة. كما أتجنب تفويت التهديدات الحقيقية في الأماكن الأكثر أهمية.
لماذا يجب أن تتغير الحساسية حسب الإعداد المسبق
إذا استخدمت قاعدة ثابتة واحدة للمسار بأكمله، فقد أحصل على نتائج سيئة. على سبيل المثال، قد ترى كاميرا في منطقة على جانب الطريق السيارات والظلال والأشخاص في الشارع. إذا ضبطتها على حساسية عالية جدًا، أحصل على الكثير من الإنذارات. إذا ضبطتها على حساسية منخفضة جدًا، فقد أفوت شخصًا ما بالقرب من السياج. لذلك أحتاج إلى تحكم قائم على المنطقة. يمكنني ضبط الإعدادات المسبقة للكشف للبوابة، باب المستودع، خزانة الطاقة الشمسية، أو منطقة التحميل. ثم يعرف الذكاء الاصطناعي أين يبحث بعناية أكبر.
ما أقوم بضبطه عادة في إعداد مسبق للكشف
غالبًا ما أقوم بضبط هذه العناصر:
| الإعداد | ما أقوم بتغييره | لماذا يساعد |
|---|---|---|
| الحساسية | مستوى تشغيل أعلى أو أقل للذكاء الاصطناعي | يناسب المشهد المحلي |
| وقت المكوث | المدة التي تبقى فيها الكاميرا في الإعداد المسبق | يمنح الذكاء الاصطناعي مزيدًا من الوقت للمسح |
| نوع الهدف | إنسان، مركبة، أو كلاهما | يقلل الإنذارات الخاطئة |
| استجابة الإنذار | تتبع، تسجيل، أو إخطار | يتطابق مع حاجة الوظيفة |
كيف أستخدم هذا في مشاريع حقيقية
في مزرعة للطاقة الشمسية، قد أقوم بتعيين زوايا السياج كإعدادات مسبقة حساسة لأن المتسللين غالبًا ما يدخلون من هناك. في موقع بناء، قد أقوم بتعيين منطقة تخزين المواد كإعداد مسبق عالي المخاطر لأن السرقة تحدث غالبًا هناك. في ساحة لوجستية، قد أهتم بالشاحنات أكثر، لذلك أركز على اكتشاف المركبات عند البوابة واكتشاف الأشخاص بالقرب من الأبواب المحظورة. هذا النوع من الإعداد يساعدني على استخدام نفس كاميرا PTZ بطرق عديدة دون تغيير الأجهزة. أنا فقط أغير القواعد. هذا يجعل النظام مرنًا وأسهل في البيع للعملاء المختلفين.
لماذا يساعد هذا المشترين مثل ديفيد ميلر
يريد المشتري التقني عددًا أقل من الإنذارات الكاذبة وضوضاء الموقع الأقل. يريد أيضًا كاميرا يمكن أن تتناسب مع الموقع، وليس أن تقاومه. تساعدني إعدادات الكشف المسبقة على القيام بذلك. إنها تسمح لي بجعل الكاميرا ذكية حيث يجب أن تكون ذكية، وهادئة حيث يجب أن تكون هادئة. هذا مهم للاستخدام طويل الأمد لأن النظام المليء بالإنذارات غالبًا ما يتم تجاهله. أريد أن يظل النظام مفيدًا، لذلك أقوم بضبط كل إعداد مسبق على المخاطر الحقيقية المحيطة به.
هل يتم تسليم “الرحلة إلى التتبع” فورًا دون تجميد الفيديو؟
أهتم بهذا لأنه حتى التجميد القصير يمكن أن يخفي الحركة الأولى للتهديد.
نعم. تم تصميم عملية التسليم لتكون سريعة، ويمكن للنظام التبديل من التجول إلى التتبع دون تجميد مرئي في الظروف العادية. تحتفظ الكاميرا بالمشهد نشطًا، لذا تبدو عملية الانتقال سلسة وفورية.
![]() انتقال كاميرا PTZ من التجول إلى التتبع سلس
انتقال كاميرا PTZ من التجول إلى التتبع سلس
هذه نقطة رئيسية لأعمال الأمان الجادة. إذا تجمدت الكاميرا أثناء عملية التسليم، فقد أفقد الخطوة الأولى لشخص يدخل الموقع. قد أفقد أيضًا اتجاه المركبة، أو وضعية الجسم، أو زاوية الوجه. لذلك يحتاج النظام إلى تبديل نظيف. في رأيي، لا ينبغي أن تبدو كاميرا الدورية الجيدة وكأنها لعبة تتوقف وتفكر ثم تتحرك مرة أخرى. يجب أن تبدو كنظام مستمر واحد. عندما ترى الكاميرا هدفًا، يجب أن تنتقل إلى التتبع بتأخير قليل جدًا. هذا هو نوع الاستجابة الذي يجعل الدورية مفيدة في الميدان.
لماذا الانتقال السلس مهم
يحمي الانتقال السلس الأدلة. يجعل الفيديو أكثر قابلية للاستخدام للمراجعة. كما أنه يساعد المشغل على الوثوق بالنظام. إذا قفزت الكاميرا كثيرًا، فقد يفلت الهدف من الإطار. إذا تجمد الفيديو، فقد يعتقد المشغل أن الكاميرا فقدت الهدف. هذا يخلق شكًا. أريد أن يظل الهدف مرئيًا بينما تقوم الكاميرا بضبط الموضع والتكبير والتركيز. لهذا السبب يجب أن يعمل التحكم في الحركة واكتشاف الذكاء الاصطناعي معًا. جزء واحد وحده ليس كافيًا.
ما الذي لا يزال بإمكانه التأثير على سرعة التسليم
أحتاج أيضًا إلى أن أكون صادقًا. تعتمد السرعة في العالم الحقيقي على عدة أشياء:
| العامل | التأثير على التسليم | ملاحظتي |
|---|---|---|
| مسافة الهدف | قد تحتاج الأهداف البعيدة إلى مزيد من وقت التكبير | أسرع في المدى القريب |
| سرعة الدورية | التجول السريع جدًا يمكن أن يقصر وقت المسح | السرعة المتوسطة أكثر أمانًا |
| إضاءة المشهد | الضوء الخافت يمكن أن يبطئ التعرف | الأشعة تحت الحمراء الجيدة تساعد |
| حمل الشبكة | البث الثقيل يمكن أن يضيف تأخيرًا | النطاق الترددي المستقر يساعد |
كيف أحافظ على الانتقال نظيفًا
عادةً ما أختار سرعة دورية متوازنة. لا أسرع في التجول كثيرًا. كما أنني أحافظ على وضع نقاط محددة جيدًا، حتى تتمكن الكاميرا من مسح المناطق المفيدة بدلاً من السماء الفارغة أو الطريق. إذا كان النظام يدعم ذلك، فأنا أقوم بتشغيل تتبع التكبير البصري8 وقوي دعم الإضاءة المنخفضة9. بهذه الطريقة، تتمتع الكاميرا بفرصة أفضل للبقاء على الهدف أثناء التبديل. بالنسبة للمشاريع خارج الشبكة، أهتم بهذا الأمر أكثر لأن المواقع النائية لا تحصل على فرص ثانية. إذا فات الكاميرا الثانية الأولى، فقد أفقد الحدث بأكمله.
ما يعنيه هذا للمركبين والمدمجين
بالنسبة للمركبين، يعني الانتقال السلس شكاوى أقل من المستخدم النهائي. بالنسبة للمدمجين، يعني ذلك مكالمات دعم أقل وأسئلة أقل حول “لماذا توقفت الكاميرا؟” بالنسبة للمشترين، يعني ذلك دليلًا أفضل على أن النظام يمكنه العمل تحت الضغط. أخبر العملاء دائمًا أن الدوريات إلى التتبع مفيدة فقط إذا كان التبديل يبدو طبيعيًا. إذا تمكنت الكاميرا من الكشف والتوقف والتتبع ثم العودة إلى الدورية مع تأخير بسيط، فإنها تقوم بعمل أمني حقيقي. إذا لم يكن الأمر كذلك، فهي تتحرك فقط.
الخاتمة
أستخدم كاميرات دورية ذكية لأنها يمكنها الكشف والتتبع والعودة إلى الخدمة دون مساعدة بشرية. هذا ما يجعلها قوية لمواقع الأمن عن بعد.
1. فهم أساسيات كاميرات التحريك والإمالة والتكبير وتطبيقاتها الصناعية. ︎↩︎ 2. تعلم كيف يمكّن التتبع التلقائي الكاميرات من متابعة الأهداف المتحركة تلقائيًا. ︎↩︎ 3. استكشاف كيف تقوم وضعية الدورية بتسلسل النقاط المحددة لتغطية مناطق كبيرة تلقائيًا. ︎↩︎ 4. تعريف واستخدام المواقع المحددة للمراقبة بكاميرات PTZ. ︎↩︎ 5. اكتشف كيف يساعد تعويض الحركة الذكاء الاصطناعي في تصفية حركة الخلفية أثناء حركة PTZ. ︎↩︎ 6. افهم وقت التوقف (dwell time) على أنه الفترة التي تتوقف فيها الكاميرا عند موضع محدد مسبقًا. ︎↩︎ 7. تعرف على كيف تسمح إعدادات الكشف المسبق (detection presets) بتعيين مستويات حساسية مختلفة لكل موضع. ︎↩︎ 8. تعلم كيف يحافظ التقريب البصري (optical zoom) على جودة الصورة أثناء تتبع الأهداف البعيدة. ︎↩︎ 9. افهم كيف تعزز تقنية الإضاءة المنخفضة (low-light technology) أداء الكاميرا ليلاً. ︎↩︎