
لقد فقدت العد كم مرة اتصل بي عميل محبط لأن كاميراته التقطت متسللاً من زاوية واحدة لكنها فقدته تمامًا في الزاوية التالية.
نعم، يمكن لتطبيق مصمم جيدًا ربط وحدات PTZ متعددة لعرض مسار حركة هدف واحد على الخريطة. يتطلب هذا تتبعًا متعدد الكاميرات مدعومًا بالذكاء الاصطناعي، ومواقع كاميرات جغرافية مرجعية، ومنصة برمجية موحدة تقوم بربط أحداث الكشف من كل PTZ في مسار مستمر واحد.
 تتبع هدف PTZ متعدد الكاميرات على الخريطة
تتبع هدف PTZ متعدد الكاميرات على الخريطة
تتبع شخص أو مركبة عبر موقع كبير بكاميرا واحدة فقط يكاد يكون مستحيلاً. كاميرات PTZ1 تغطي مساحات واسعة، ولكن لديها نقاط عمياء أثناء التحريك والإمالة والتكبير. القوة الحقيقية تأتي عندما تعمل وحدات PTZ متعددة معًا كنظام. أدناه، سأوضح بالتفصيل كيف يعمل هذا، وماذا تفعل كل قطعة من اللغز، وما تحتاجه لتحقيق ذلك في مشروعك.
جدول المحتويات
كيف تقوم ميزة “التتبع متعدد الكاميرات” بتسليم هدف من PTZ إلى آخر؟
أتذكر مدير مشروع في تكساس يخبرني أن أكبر مخاوفه لم يكن الاقتحام نفسه، بل اللحظة التي خرج فيها المتسلل من مجال رؤية كاميرا واختفى ببساطة.
يقوم التتبع متعدد الكاميرات بتسليم هدف باستخدام خوارزميات الذكاء الاصطناعي لإعادة التعرف (Re-ID). عندما تفقد PTZ هدفًا عند حافة مجال رؤيتها، ينبه النظام الكاميرا التالية في سلسلة التغطية لالتقاط موضوع يطابق نفس البصمة المرئية، مثل لون الملابس وشكل الجسم واتجاه الحركة.
 تتبع هدف الذكاء الاصطناعي لتسليم كاميرا PTZ
تتبع هدف الذكاء الاصطناعي لتسليم كاميرا PTZ
كيف يعمل التسليم فعليًا خطوة بخطوة
عملية التسليم ليست سحرًا. إنها تتبع سلسلة منطقية واضحة يقوم نظامك بتشغيلها في أجزاء من الثانية.
أولاً، تكتشف الكاميرا A هدفًا باستخدام اكتشاف الذكاء الاصطناعي للبشر أو المركبات. يقوم النظام بإنشاء “متجه الميزة2” لهذا الهدف. فكر في الأمر كبصمة رقمية تعتمد على المظهر. يشمل ذلك مخطط الألوان، ونسب الجسم، وسرعة المشي.
ثانيًا، عندما يصل الهدف إلى حافة مجال رؤية الكاميرا A، يتحقق النظام من الكاميرات التي لديها مناطق تغطية متداخلة أو مجاورة. هذا هو المكان الذي يكون فيه تخطيط خريطة الكاميرا الخاص بك مهمًا. يجب أن يكون لكل PTZ إحداثيات GPS3 أو موقعه المرسوم بالبكسل مسجلًا في البرنامج.
يرسل النظام “تنبيهًا مسبقًا” إلى الكاميرا B. تبدأ الكاميرا B في مسح منطقة تغطيتها بحثًا عن أي كائن يطابق المتجه المميز. بمجرد العثور على تطابق أعلى من عتبة الثقة4 (عادةً 85% أو أعلى)، فإنه يثبت ويبدأ تتبع PTZ التلقائي.
المتطلبات التقنية الرئيسية
| المكوّن | الدور | ما أهمية ذلك |
|---|---|---|
| محرك إعادة تحديد الهوية بالذكاء الاصطناعي | يطابق مظهر الهدف عبر الكاميرات | بدونه، تتعامل كل كاميرا مع كل شخص ككشف جديد |
| تسجيل خريطة الكاميرا | يحدد العلاقات المكانية بين كاميرات PTZ | يحتاج النظام إلى معرفة الكاميرا “التالية” في المسار |
| شبكة بزمن انتقال منخفض | يضمن وصول أوامر التسليم في الوقت المناسب | تأخير لمدة ثانيتين يعني أن الهدف يسير 3 أمتار دون تتبع |
| مناطق مجال الرؤية المتداخلة | يوفر منطقة انتقالية للمطابقة | التداخل الصفري يعني فرصة صفرية لتسليم نظيف |
ماذا يحدث عند فشل التسليم؟
في الظروف الواقعية، يمكن أن يفشل التسليم. قد يؤدي المطر أو الضباب أو تغيير الملابس للهدف إلى كسر تطابق إعادة التحديد. تتعامل الأنظمة الجيدة مع هذا عن طريق الاحتفاظ بعلامة “آخر موقع معروف” على الخريطة وتوسيع دائرة البحث على الكاميرات القريبة. تساعد كاميرات الربط المزدوجة العدسة لدينا هنا. تحافظ العدسة الثابتة ذات الزاوية الواسعة على نظرة عامة ثابتة بينما تقوم عدسة PTZ بالتقريب. حتى لو فقدت كاميرا PTZ التتبع، فإن العدسة الواسعة لا تزال تسجل المنطقة العامة. هذا يمنح النظام فرصة ثانية لإعادة اكتشاف الهدف.
بالنسبة للمواقع التي تستخدم أنظمة PTZ الشمسية 4G الخاصة بنا في المواقع غير المتصلة بالشبكة، فإن عرض النطاق الترددي مهم. حزمة بيانات إعادة التحديد صغيرة، عادةً أقل من 5 كيلوبايت لكل حدث تسليم. لذلك حتى مع اتصال 4G بسرعة تحميل محدودة، فإن أمر التسليم يسافر بسرعة. يظل بث الفيديو الثقيل محليًا على بطاقة SD أو NVR. فقط البيانات الوصفية ولقطات التنبيه تذهب عبر 4G.
هل يمكنني رؤية مسار “فتات الخبز” لمتسلل عبر ممتلكاتي بأكملها؟
أخبرني أحد عملائي في كندا، الذي يدير مزرعة شمسية بمساحة 200 فدان، أن التقاط اللص بالكاميرا كان عديم الفائدة إذا لم يتمكن من إظهار الشرطة بالضبط أين ساروا وأي الألواح لمسوها.
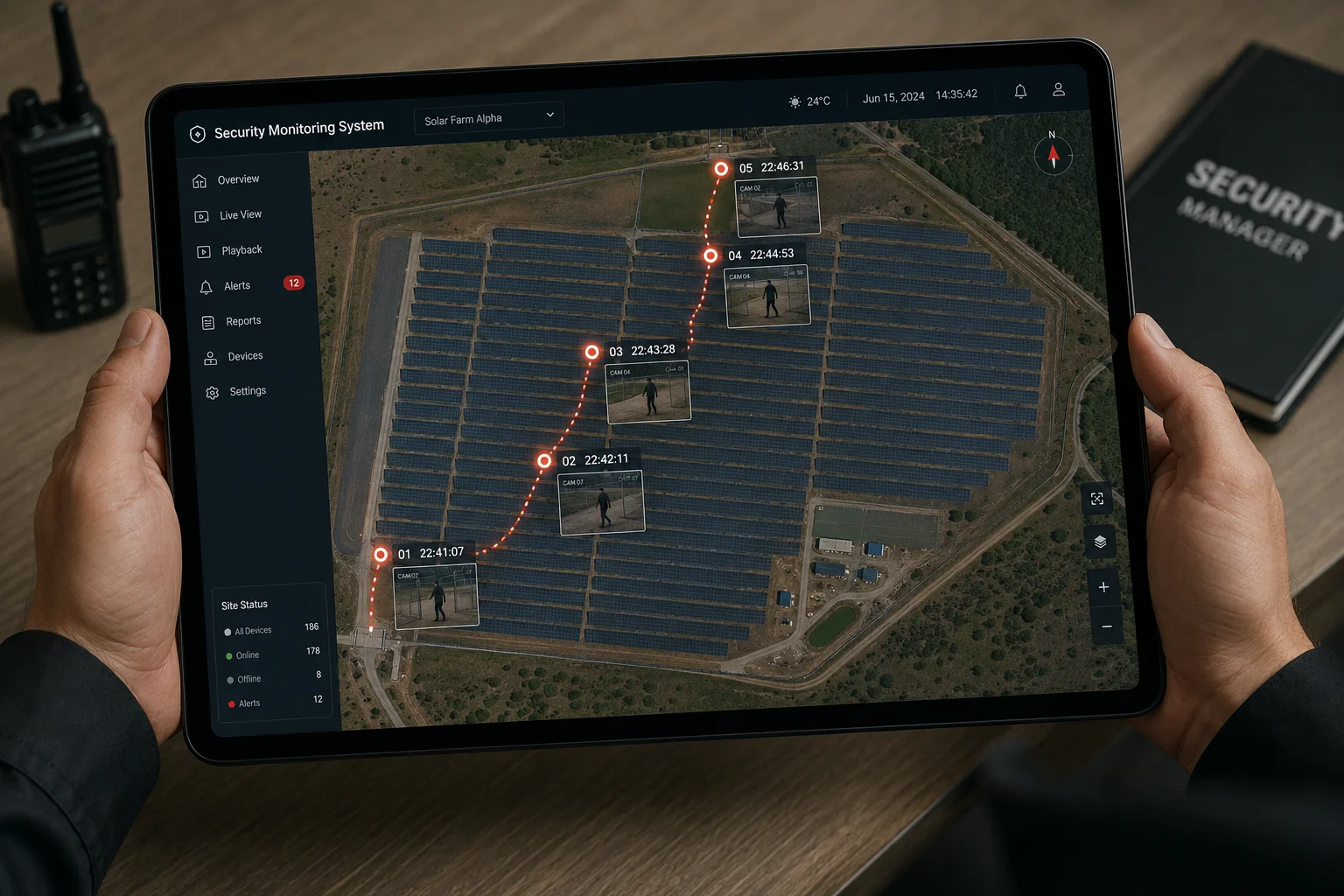
نعم، يمكنك رؤية مسار فتات الخبز. يرسم التطبيق كل حدث كشف كنقطة مختومة بالوقت على خريطة موقعك. عند توصيلها بالتسلسل، تشكل هذه النقاط مسارًا مرئيًا يوضح بالضبط أين تحرك المتسلل، ومتى تحرك، وأي الكاميرات التقطت كل جزء.
 مسار الفتات مسار المتسلل خريطة الموقع
مسار الفتات مسار المتسلل خريطة الموقع
كيف يتم بناء مسار الفتات
في كل مرة تكتشف فيها كاميرا الهدف المتعقب، تسجل ثلاثة أشياء: الموضع المحدد بنظام تحديد المواقع العالمي (GPS)، والطابع الزمني، ولقطة شاشة. يجمع التطبيق هذه السجلات ويرسمها على خريطة موقعك كسلسلة من النقاط المتصلة.
هذا ليس جهاز تتبع GPS مباشر للمتسلل. إنه إعادة بناء بناءً على أحداث اكتشاف الكاميرا. تعتمد الدقة على عدد الكاميرات لديك ومدى تغطيتها للموقع. المزيد من الكاميرات تعني المزيد من النقاط. المزيد من النقاط تعني مسارًا أكثر سلاسة.
ما البيانات التي يحتوي عليها كل فتات
كل نقطة على المسار قابلة للنقر. عندما تنقر على نقطة فتات في التطبيق، ترى:
- اسم الكاميرا التي التقطتها
- الوقت الدقيق للاكتشاف
- لقطة شاشة أو مقطع فيديو قصير
- درجة ثقة مطابقة الذكاء الاصطناعي
هذه أدلة قوية لإنفاذ القانون. بدلاً من تسليم الشرطة 12 ساعة من اللقطات الخام من 8 كاميرات، تسلمهم خريطة واضحة مع جدول زمني. يمكنهم رؤية المتسلل دخل من السياج الشمالي في الساعة 02:14 صباحًا، ومشى بجوار المبنى C في الساعة 02:17 صباحًا، وخرج عبر البوابة الشرقية في الساعة 02:23 صباحًا.
إعداد عملي لتتبع الفتات
| خطوة الإعداد | ما تفعله | الأداة المستخدمة |
|---|---|---|
| 1. تحميل خريطة الموقع | استيراد صورة قمر صناعي أو رسم CAD لممتلكاتك | تطبيق أو برنامج VMS |
| 2. وضع أيقونات الكاميرا | اسحب كل كاميرا إلى موقعها في العالم الحقيقي على الخريطة | محرر خرائط التطبيق |
| 3. تحديد أقماع التغطية | ارسم زاوية مجال الرؤية لكل PTZ | محرر خرائط التطبيق |
| 4. تمكين تتبع الذكاء الاصطناعي | قم بتشغيل اكتشاف الأشخاص/المركبات لجميع الكاميرات | واجهة الويب للكاميرا |
| 5. ربط الكاميرات بالمجموعة | قم بتعيين جميع كاميرات PTZ إلى “مجموعة تتبع” واحدة” | إعدادات VMS أو التطبيق |
قيود يجب أن تعرفها
يكون لمسار فتات الخبز فجوات إذا كانت تغطية الكاميرا لديك بها فجوات. إذا كان هناك امتداد بطول 50 مترًا بين كاميرتين بدون تداخل، فسيظهر المسار قفزة. يرسم التطبيق خطًا متقطعًا بين النقطتين للإشارة إلى “المسار المفترض” مقابل “المسار المؤكد”. بالنسبة للمناطق الحيوية مثل نقاط الدخول والمناطق ذات القيمة العالية، أوصي دائمًا بتداخل التغطية. بالنسبة للممرات منخفضة المخاطر، تكون الفجوة مقبولة طالما تم تغطية نقاط الدخول والخروج.
تساعد كاميرات PTZ ذات التقريب البصري 38X و 40X لدينا في سد الفجوات دون إضافة المزيد من الكاميرات. يمكن لكاميرا PTZ واحدة بتقريب 40X تغطية ممر بطول 200 متر ولا تزال تلتقط تفاصيل على مستوى الوجه في الطرف البعيد. هذا يعني عددًا أقل من الكاميرات، وفجوات أقل في فتات الخبز، وتكلفة أقل للأجهزة لمشروعك.
هل سيتحول التطبيق تلقائيًا إلى العرض المباشر لأقرب كاميرا مع تحرك الهدف؟
سألني موزع في الشرق الأوسط هذا السؤال بالضبط. قال إن مشغليه كانوا يضيعون الوقت في النقر يدويًا بين خلاصات الكاميرا أثناء تطفل نشط.
نعم، يمكن للتطبيق تبديل العرض المباشر تلقائيًا إلى أقرب كاميرا مع تحرك الهدف. هذه الميزة، التي غالبًا ما تسمى “المتابعة التلقائية” أو “وضع المطاردة المباشرة”، تحافظ على شاشة المشغل مثبتة على الهدف دون أي تدخل يدوي. يستخدم النظام بيانات تسليم التتبع لتحديد الكاميرا التي لديها أفضل عرض حالي.
![]() تبديل تلقائي للتطبيق للعرض المباشر لأقرب كاميرا PTZ
تبديل تلقائي للتطبيق للعرض المباشر لأقرب كاميرا PTZ
كيف يعمل التبديل التلقائي عمليًا
عند تنشيط وضع المطاردة المباشرة في التطبيق، يقوم النظام بثلاثة أشياء في وقت واحد:
أولاً، يحافظ على قفل PTZ للكاميرا الحالية على الهدف باستخدام التتبع التلقائي للذكاء الاصطناعي. تقوم الكاميرا فعليًا بالدوران والإمالة لمتابعة الشخص أو المركبة.
ثانيًا، يراقب موضع الهدف بالنسبة لحدود التغطية. عندما يقترب الهدف من الحافة، يقوم النظام بتحميل بث الكاميرا التالية مسبقًا في الخلفية.
ثالثًا، عند تشغيل التسليم، يقوم التطبيق بتبديل شاشتك الرئيسية إلى بث الكاميرا الجديدة. يستغرق الانتقال حوالي 0.5 إلى 1.5 ثانية اعتمادًا على سرعة شبكتك. على شبكة LAN محلية مع NVR5, ، يكون فوريًا تقريبًا. على اتصال 4G، توقع تخزينًا مؤقتًا قصيرًا.
تجربة المشغل مقابل الوضع الآلي بالكامل
هناك طريقتان لاستخدام هذه الميزة:
الوضع شبه الآلي: يعرض التطبيق إشعارًا منبثقًا يقول “الهدف يتحرك إلى الكاميرا 3. تبديل العرض؟” يضغط المشغل على نعم أو لا. هذا جيد للمواقع التي بها العديد من النتائج الإيجابية الخاطئة حيث تريد تأكيدًا بشريًا.
الوضع الآلي بالكامل: ينتقل التطبيق دون سؤال. يراقب المشغل فقط. هذا أفضل للمواقع عالية الأمان حيث يكون وقت الاستجابة أكثر أهمية من تصفية الإنذارات الكاذبة. يمكن للمشغل المدرب دائمًا تجاوز التبديل التلقائي واختيار كاميرا أخرى يدويًا إذا اختار التبديل التلقائي الكاميرا الخاطئة.
متطلبات الشبكة للتبديل التلقائي السلس
هذه الميزة تستهلك الكثير من عرض النطاق الترددي لأنك تقوم ببث الفيديو المباشر من كاميرات متعددة في وقت واحد (العرض الحالي بالإضافة إلى التخزين المؤقت المسبق للتالي). إليك ما أوصي به:
بالنسبة لإعدادات NVR المتصلة بشبكة LAN، يعمل هذا مباشرة. تتعامل شبكة Gigabit Ethernet مع تدفقات 4K متعددة دون مشكلة.
بالنسبة لمواقع الطاقة الشمسية 4G، تحتاج إلى إجراء مقايضات. أقترح ضبط تدفق المطاردة المباشر على جودة التدفق الفرعي (720P أو حتى دقة D1) أثناء التبديل التلقائي. بمجرد تأكيد المشغل للكاميرا التي يجب التركيز عليها، يمكنه يدويًا ترقيتها إلى التدفق الرئيسي (4K). هذا يحافظ على استخدام بيانات 4G تحت السيطرة مع الاستمرار في توفير الوعي الظرفي في الوقت الفعلي.
تدعم كاميراتنا إخراج التدفق المزدوج خصيصًا لهذا السبب. يسجل التدفق الرئيسي محليًا بدقة 4K كاملة. يذهب التدفق الفرعي عبر 4G للمشاهدة عن بُعد. تحصل على أفضل ما في العالمين: جودة دليل كاملة على بطاقة SD ومراقبة عن بُعد سريعة الاستجابة عبر الهاتف المحمول.
هل تتطلب هذه الميزة خادمًا مركزيًا، أم تتم إدارتها عبر مزامنة P2P من كاميرا إلى أخرى؟
سألني أحد مدمجي الأنظمة في أوروبا ذات مرة عما إذا كان بحاجة إلى بيع عميله خادم بقيمة 10000 دولار لتمكين تتبع الكاميرات المتعددة. إنه سؤال عادل لأن الإجابة تغير ميزانية المشروع بأكملها.
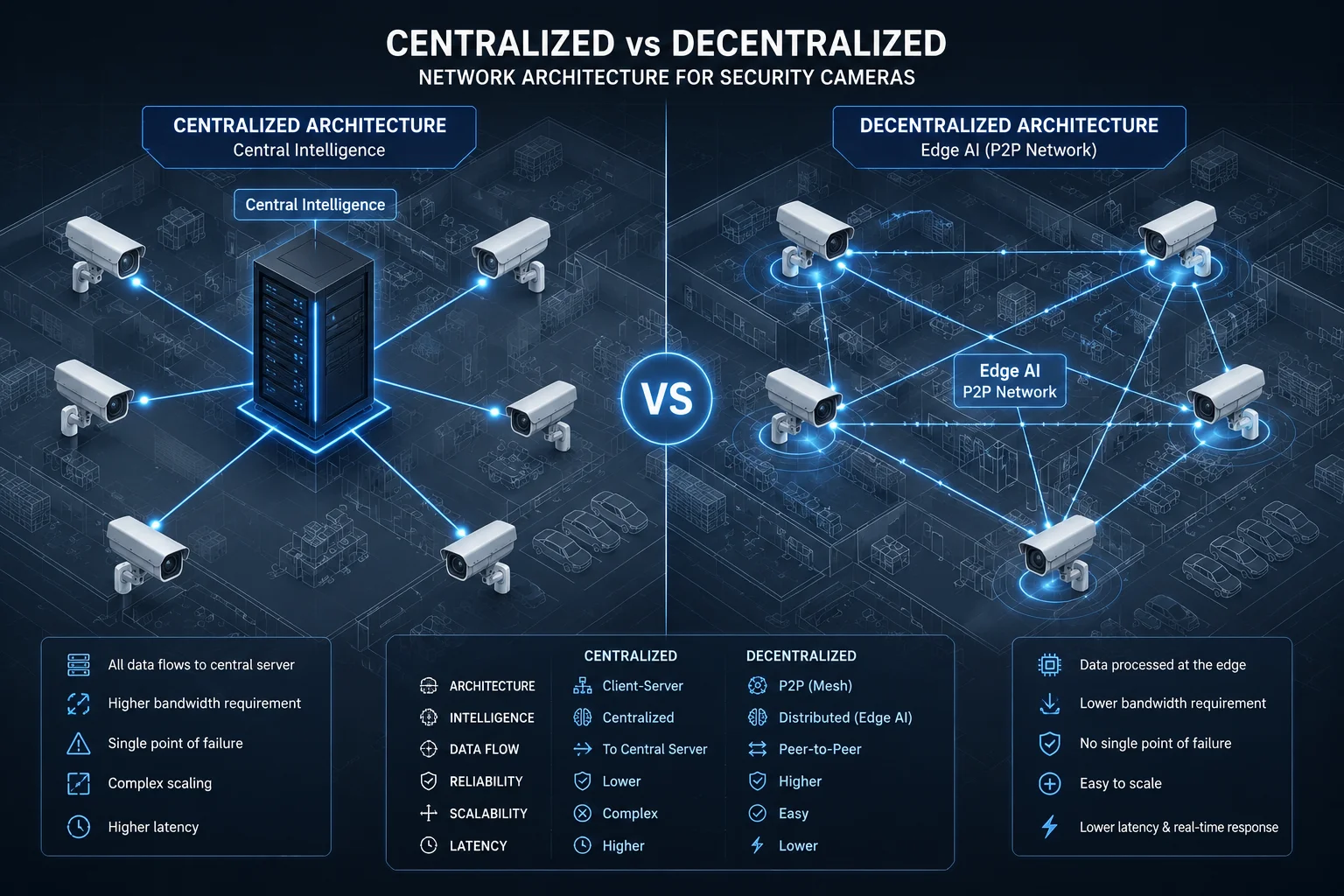
يتطلب تتبع الكاميرات المتعددة عادةً نقطة معالجة مركزية، ولكنه لا يعني دائمًا خادمًا مخصصًا. تستخدم بعض الأنظمة NVR مع ذكاء اصطناعي مدمج كعقل مركزي. يستخدم البعض الآخر المعالجة المستندة إلى السحابة. مزامنة الكاميرا إلى الكاميرا P2P الحقيقية للتتبع نادرة في المنتجات الحالية لأن عبء حساب الذكاء الاصطناعي ثقيل جدًا على أجهزة الحافة وحدها.
 الخادم المركزي مقابل بنية تتبع الكاميرات المتعددة P2P
الخادم المركزي مقابل بنية تتبع الكاميرات المتعددة P2P
فهم خيارات البنية الثلاثة
لا توجد إجابة واحدة هنا. يعتمد الخيار الصحيح على حجم موقعك وميزانيتك وظروف شبكتك. دعني أفصل كل خيار.
الخيار 1: الخادم المركزي (NVR أو كمبيوتر مخصص)
هذا هو الإعداد الأكثر شيوعًا للتركيبات الاحترافية. يستقبل NVR أو جهاز كمبيوتر يقوم بتشغيل برنامج VMS (مثل Milestone أو Blue Iris) جميع تدفقات الكاميرا. يقوم الخادم بتشغيل محرك Re-ID للذكاء الاصطناعي، ويدير عمليات التسليم، وينشئ مسار فتات الخبز.
الإيجابيات: الأكثر موثوقية، أقل زمن انتقال لعمليات التسليم، يدعم معظم الكاميرات. سلبيات: تكلفة أولية أعلى، نقطة فشل واحدة إذا تعطل الخادم، يتطلب أجهزة في الموقع.
الخيار 2: المعالجة السحابية
ترسل الكاميرات بيانات التعريف للكشف (وليس الفيديو الكامل) إلى خادم سحابي. يقوم السحابة بتشغيل مطابقة إعادة التعريف (Re-ID) ويرسل أوامر التسليم مرة أخرى إلى الكاميرات. يعيش مسار الفتات في التطبيق السحابي.
الإيجابيات: لا حاجة لخادم في الموقع، يعمل بشكل جيد لإدارة مواقع متعددة، تحديثات برامج تلقائية. سلبيات: يعتمد على الاتصال بالإنترنت، تكلفة اشتراك مستمرة، زيادة طفيفة في زمن الاستجابة للتسليم.
الخيار 3: الذكاء الاصطناعي الطرفي مع تنسيق P2P
هذا هو النهج الأحدث ولا يزال في مرحلة النضج. كل كاميرا لديها شريحة الذكاء الاصطناعي الخاصة بها قوية بما يكفي لتشغيل إعادة التعريف (Re-ID) الأساسية. تتواصل الكاميرات مباشرة مع بعضها البعض عبر الشبكة المحلية لتنسيق عمليات التسليم.
الإيجابيات: لا حاجة لخادم، يعمل في إعدادات خارج الشبكة بالكامل، لا توجد نقطة فشل واحدة. سلبيات: يقتصر على مجموعات كاميرات صغيرة (4-8 وحدات)، دقة إعادة التعريف (Re-ID) أقل من الحلول المستندة إلى الخادم، تزداد تعقيدات البرامج الثابتة.
أي بنية تناسب أي مشروع؟
| نوع المشروع | أفضل بنية | السبب |
|---|---|---|
| موقع تجاري كبير (20+ كاميرا) | خادم مركزي (NVR/VMS) | يحتاج إلى قوة معالجة للعديد من المسارات المتزامنة |
| سلسلة متاجر تجزئة متعددة المواقع | سحابي | إدارة مركزية عبر المواقع دون موظفي تكنولوجيا معلومات محليين |
| موقع بناء بعيد (4G بالطاقة الشمسية) | الذكاء الاصطناعي الطرفي مع P2P | لا يوجد إنترنت موثوق للسحابة، ولا طاقة للخادم |
| الحكومة أو البنية التحتية الحيوية | خادم مركزي + تكرار | يتطلب أعلى دقة ولا يمكنه تحمل الاعتماد على السحابة |
ما نقدمه في
تتميز كاميرات تتبع الذكاء الاصطناعي المزدوجة العدسة لدينا بـ الذكاء الاصطناعي الطرفي6 شرائح تدعم الترحيل الأساسي من نظير إلى نظير بين 2-4 كاميرات بدون أي خادم. للنشر الأكبر، كاميراتنا بالكامل ONVIF7 و RTSP8 متوافقة، لذا فهي تتكامل مع أي منصة VMS رئيسية تدعم تتبع الكاميرات المتعددة.
لعملائنا الذين يستخدمون الطاقة الشمسية 4G في المناطق النائية، أوصي عادةً بنهج هجين. استخدم الذكاء الاصطناعي الطرفي للتتبع في الوقت الفعلي في الموقع، وقم بمزامنة بيانات مسار فتات الخبز مع التطبيق السحابي عندما تسمح النطاق الترددي. بهذه الطريقة، يعمل التتبع حتى لو انقطع اتصال 4G مؤقتًا. يتم تحميل بيانات الخريطة والمسار بمجرد عودة الاتصال.
النقطة الرئيسية هي هذه: لا تحتاج إلى اختيار بنية واحدة إلى الأبد. ابدأ بالذكاء الاصطناعي الطرفي لنشر صغير. إذا نما الموقع، أضف NVR كعقل مركزي. تعمل كاميراتنا في كلا الوضعين دون تغييرات في البرامج الثابتة. هذه المرونة تحمي استثمار عميلك مع تزايد احتياجاتهم الأمنية.
صحيح مزامنة الكاميرا إلى الكاميرا من نظير إلى نظير9 للتتبع نادر في المنتجات الحالية لأن حمل حساب الذكاء الاصطناعي ثقيل جدًا على الأجهزة الطرفية وحدها.
الخاتمة
ربط كاميرات PTZ متعددة لتتبع هدف واحد عبر خريطة ممكن اليوم مع المزيج الصحيح من إعادة تعريف الذكاء الاصطناعي، ووضع الكاميرا المناسب، وبنية معالجة مناسبة. سواء اخترت الخادم، أو السحابة، أو الذكاء الاصطناعي الطرفي من نظير إلى نظير يعتمد على ظروف موقعك وميزانيتك.
1. نظرة عامة على قدرات كاميرات PTZ وحالات الاستخدام النموذجية في الأمن. ︎↩︎ 2. يحدد متجهات الميزات كتمثيلات رياضية لسمات الكائن في التعلم الآلي. ︎↩︎ 3. يشرح كيفية استخدام إحداثيات GPS لتحديد مواقع الكاميرات على الخريطة. ︎↩︎ 4. مصطلح تعلم آلي يحدد الحد الأدنى من الاحتمالية لمطابقة إيجابية في إعادة التعريف. ︎↩︎ 5. مسجل فيديو الشبكة - جهاز تخزين ومعالجة مركزي لكاميرات IP. ︎↩︎ 6. يشرح معالجة الذكاء الاصطناعي الطرفي على أجهزة مثل الكاميرات، مما يتيح التتبع المحلي بدون خوادم. ︎↩︎ 7. معيار ONVIF لتوافق الكاميرات؛ ذو صلة بدمج كاميرات PTZ متعددة. ︎↩︎ 8. بروتوكول RTSP لبث الفيديو من كاميرات IP؛ مهم للعرض المباشر والتسليم. ︎↩︎ 9. مفهوم الاتصال من نظير إلى نظير المطبق على تنسيق الكاميرا لتتبع عمليات التسليم. ︎↩︎